GAMES101系列笔记一 图形学概述与线性代数入门
概述+线性代数
为什么学习图形学?
Computer Graphics is AWESOME!
主要涉及内容:
- 光栅化
- 曲线和网格
- 光线追踪
- 动画与模拟
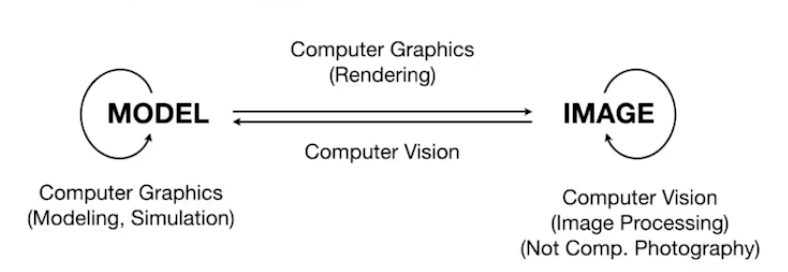
Differences between CG and CV:
线性代数回顾
向量(Vectors)
-
方向和长度
模长:\(||\vec{a}||\)
-
没有确定的起点
-
单位向量:模长为1
单位化向量: \(\hat{a} = \vec{a}/||\vec{a}||\)
-
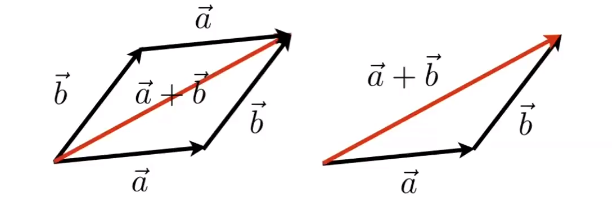
向量求和:
-
列向量,转置,模长的计算方式
\(\boldsymbol{A} = \begin{pmatrix}x \\ y\end{pmatrix} \quad \boldsymbol{A}^T = \begin{pmatrix}x&y\end{pmatrix} \quad ||\boldsymbol{A}|| = \sqrt{x^2+y^2}\)
-
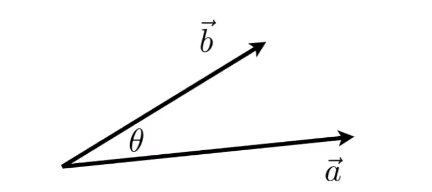
点乘(Dot/scalar Product)

-
点乘定义:
\(\vec{a} \cdot \vec{b} = ||\vec{a}||\,||\vec{b}||cos\theta\)
\(cos\theta = \frac{\vec{a}\cdot\vec{b}}{||\vec{a}\||\,||\vec{b}||}\)
-
For unit vectors:
\(cos\theta = \hat{a}\cdot\hat{b}\)
-
交换律、结合律、数乘
直角坐标系下,计算更为方便:
-
2D:
\(\vec{a}\cdot\vec{b} = \begin{pmatrix}x_a \\y_a\end{pmatrix}\cdot\begin{pmatrix}x_b \\y_b\end{pmatrix} = x_ax_b+y_ay_b.\)
-
3D:
\(\vec{a}\cdot\vec{b} = \begin{pmatrix}x_a \\y_a\\z_a\end{pmatrix}\cdot\begin{pmatrix}x_b \\y_b\\z_b\end{pmatrix} = x_ax_b+y_ay_b+z_az_b.\)
-
投影:
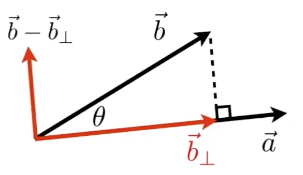
$\vec{b}_\perp:\vec{b}$ 在 $\vec{a}$ 上的投影;
$\vec{b}_\perp = k\hat{a};$
$k = ||\vec{b}_\perp|| = ||\vec{b}||cos\theta$
- 点乘可以告诉我们前和后的关系

-
叉乘(Cross\Vector product)
-
两个向量相乘,得到一个与这两个向量都相等的向量;
\(\vec{a}\times\vec{b} = -\vec{b}\times\vec{a}\)
\(\vec{a}\times\vec{a} = \vec{0}\)
\(||\vec{a}\times\vec{b}|| = ||\vec{a}||\,||\vec{b}||sin\phi\)
方向由右手螺旋定则确定

-
笛卡尔坐标系下的计算方法:
\(\vec{a}\times\vec{b} = \begin{pmatrix}y_az_b-y_bz_a \\ z_ax_b – x_az_b \\ x_ay_b-y_ax_b\end{pmatrix} = A*b = \begin{pmatrix}0 & -z_a& y_a \\ z_a & 0 & -x_a \\ -y_a & x_a & 0\end{pmatrix}\)
\(A\) 为 \(\vec{a}\) 的对偶矩阵。
-
叉乘在图形学中的作用
判定左和右(一次叉乘),判断内和外(三次叉乘)

-
-
正交系
-
三个单位向量
$ ||\vec{u}|| = ||\vec{v}|| = ||\vec{w}|| = 1$
-
两两垂直
\(\vec{u}\cdot\vec{v} = \vec{v}\cdot\vec{w} = \vec{u}\cdot\vec{w}\)
-
右手系
\(\vec{w} = \vec{u}\times\vec{v}\)
-
任何一个向量可以由这三个向量表示
\(\vec{p} = (\vec{p}\cdot\vec{u})\vec{u} + (\vec{p}\cdot\vec{v})\vec{v} + (\vec{p}\cdot\vec{w})\vec{w}\)
因为\(\vec{u}\ \vec{v}\ \vec{w}\) 都是单位向量,所以可以用 \(\vec{p}\) 在其上的投影乘以其本身来得到一个维度的分量。
-
-
矩阵(Matrices)
-
矩阵乘矩阵
维度需满足:
\((M\times N)(N\times P) = (M\times P)\)
(3 2)(2 4)= (3 4)

-
不符合交换律。但符合结合律和分配律。
\((AB)C = A(BC)\)
\(A(B+C) = AB + AC\)
\((A+B)C = AC + BC\)
-
矩阵向量乘
按 \(y\) 轴镜像
\(\begin{pmatrix}-1 & 0 \\ 0 & 1\end{pmatrix}\begin{pmatrix}x \\ y \end{pmatrix} = \begin{pmatrix}-x \\ y\end{pmatrix}\)
-
矩阵的转置
\((AB)^T = B^TA^T\)
-
单位矩阵
\(I_{3\times3} = \begin{pmatrix}1 & 0 & 0 \\ 0 & 1 & 0\\ 0 & 0 & 1\end{pmatrix}\)
\(AA^{-1} = A^{-1}A = I;\quad (AB)^{-1} = B^{-1}A^{-1}\)
-
向量乘法的矩阵形式
\(\vec{a}\cdot\vec{b} = \vec{a}^T\vec{b}\)
\(\vec{a}\times\vec{b} = \begin{pmatrix}y_az_b-y_bz_a \\ z_ax_b – x_az_b \\ x_ay_b-y_ax_b\end{pmatrix} = A^*b = \begin{pmatrix}0 & -z_a& y_a \\ z_a & 0 & -x_a \\ -y_a & x_a & 0\end{pmatrix}\)
-




