ROS2學習之旅(1)——初識ROS2
本系列用來記錄ROS2的學習過程,有錯誤或者不合理的地方請大家指正。由於博主具有ROS1的學習經歷,會添加一些與ROS1的一些對比,當然這對於ROS2本身的學習內容沒有絲毫影響,歡迎大家積極與我在評論區交流。如果給您帶來幫助,希望能給點個關注,以後還會陸續更新有關機械人的內容,點個關注不迷路~歡迎大家一起交流學習。
1.為什麼選擇ROS2?
由於ROS1基於TCP/IP通信機制,這就導致了ROS1不可避免的出現以下缺陷:
- 實時性差
- 嵌入式設備不友好
- 需要大帶寬的穩定網絡連接
- 多用於學術應用
2. ROS2 的架構
針對以上ROS1中存在的問題,ROS2對其進行改進以解決上述問題。

如圖所示,ROS1需要一個Master來處理發佈-訂閱通信中間層,而ROS2採用基於RTSP(Real-Time Publish-Subscribe)協議的DDS作為中間層,DDS(Data-Distribution Service)數據分佈式服務是一種用於實時和嵌入式系統發佈-訂閱式通信的工業標準,DDS不需要像ROS1藉助master來完成兩個節點的通信,這使得系統更加容錯和靈活。DDS廣泛應用在各種軍用場景下,證明了DDS的可靠性。同時,ROS2可以部署在多種操作系統中。
多個⼚商提供多種DDS實現,⼀般來說DDS的底層通信機制基於UDP協議或者共享內存機制(當然也有⼚商提供基於TCP的DDS實現),⽽ROS2⽀持多種DDS實現,⽤⼾可以根據實際情況選擇DDS中間層, ⽬前來說ROS2 Foxy完整⽀持以下DDS中間層:
- eProsima的Fast RTPS(當前ROS2版本默認的DDS實現)
- RTI的Connext DDS
- Eclipse Cyclone DDS
3.ROS2的內部架構:
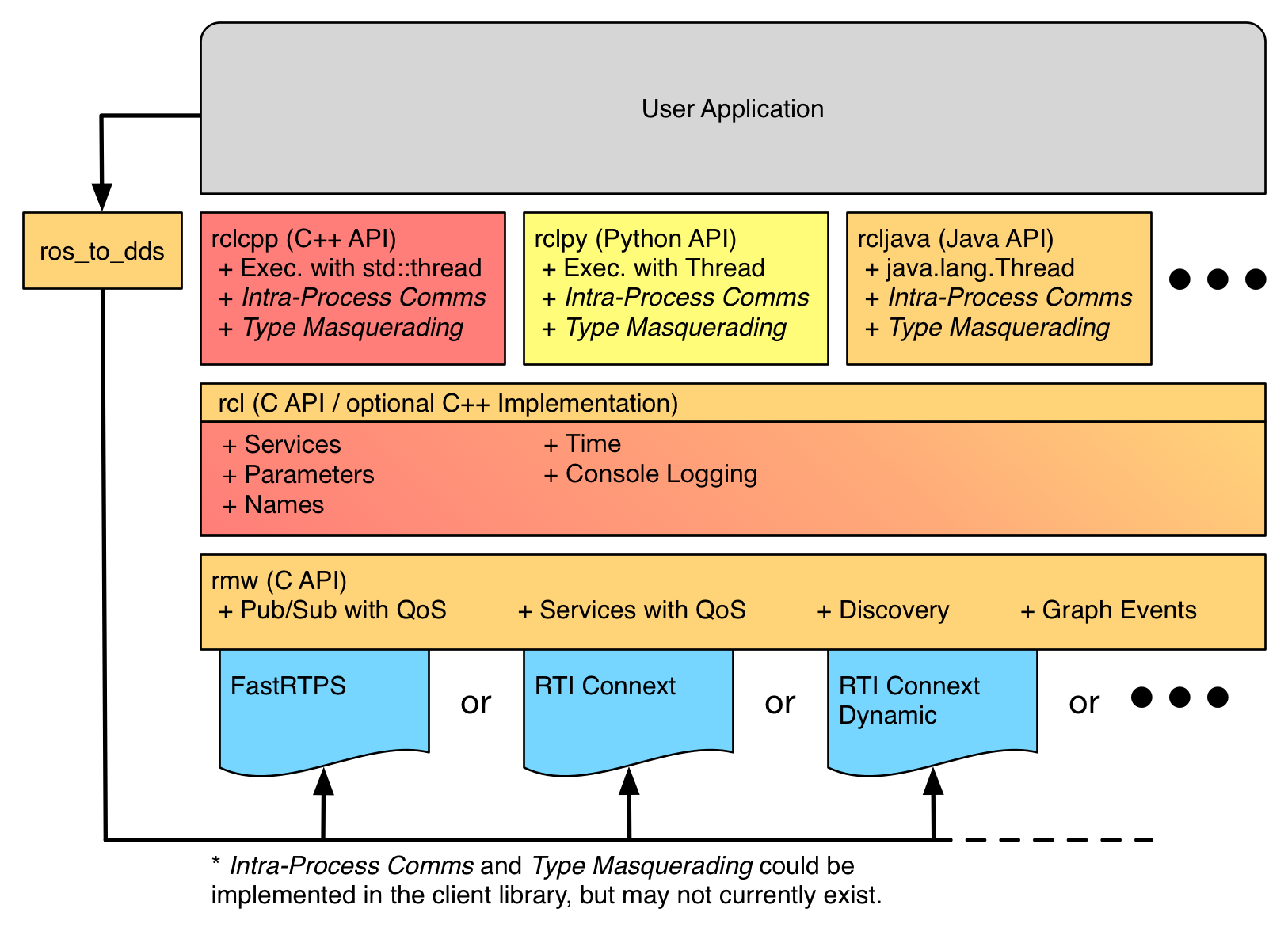
ROS2主要包括兩個主要的內部接口:
- RMW API(ROS middleware interface)
- RCL API(ROS client library interface)
rmw API是ROS2軟件棧和底層中間件的實現接口。用於ROS2的底層中間件是DDS或RTPS實現,負責發現、發佈和訂閱機制、服務的請求-應答機制和消息類型的序列化。
rcl API是一個稍高級的API,用於實現客戶端庫,不直接接觸中間件實現,而是通過ROS中間件接口(rmw API)抽象來實現。
4.ROS2中的QoS
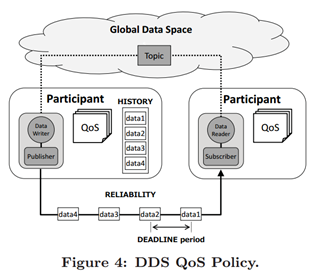
ROS2中引⼊了Quality of Service, QoS(服務質量)的策略⽤於配置節點間通信,進⽽提升了ROS2適應於不同應⽤場景的靈活性。ROS1隻⽀持基於TCP的通信,通過配置QoS,ROS2可以表現出TCP的可靠性,也可以表現出UDP那樣的⾼實時性。⽤⼾可以通過選擇不同的QoS配置⽂件以實現不同的通信表現,QoS配置⽂件為策略的集合,ROS2提供了預設的QoS配置⽂件,如下所⽰:
- 發佈-訂閱機制的QoS設定
- 服務 (Service) 的QoS設定
- 傳感器數據的QoS設定
- 參數的QoS設定
- DDS中間層默認的QoS設定
了解更多DDS相關背景,可以參考這篇⽂章:
About internal ROS 2 interfaces — ROS 2 Documentation: Foxy documentation
所以,由於ROS1與ROS2在架構方式上的不同,ROS1在啟動時需要啟動roscore,而ROS2則不需要(yyds)。
參考文章:ROS2探索總結(二)——走近ROS2.0時代 – 古月居 (guyuehome.com)
擁抱ROS2系列:ROS2概述和實踐入門(一) – 知乎 (zhihu.com)
都看到這了,點個推薦再走吧~


