淺談深度學習:如何計算模型以及中間變量的顯存佔用大小
前言
親,顯存炸了,你的顯卡快冒煙了!
torch.FatalError: cuda runtime error (2) : out of memory at /opt/conda/conda-bld/pytorch_1524590031827/work/aten/src/THC/generic/THCStorage.cu:58
想必這是所有煉丹師們最不想看到的錯誤,沒有之一。
OUT OF MEMORY,顯然是顯存裝不下你那麼多的模型權重還有中間變量,然後程序奔潰了。怎麼辦,其實辦法有很多,及時清空中間變量,優化代碼,減少batch,等等等等,都能夠減少顯存溢出的風險。
但是這篇要說的是上面這一切優化操作的基礎,如何去計算我們所使用的顯存。學會如何計算出來我們設計的模型以及中間變量所佔顯存的大小,想必知道了這一點,我們對自己顯存也就會得心應手了。
如何計算
首先我們應該了解一下基本的數據量信息:
- 1 G = 1000 MB
- 1 M = 1000 KB
- 1 K = 1000 Byte
- 1 B = 8 bit
好,肯定有人會問為什麼是1000而不是1024,這裡不過多討論,只能說兩種說法都是正確的,只是應用場景略有不同。這裡統一按照上面的標準進行計算。
然後我們說一下我們平常使用的向量所佔的空間大小,以Pytorch官方的數據格式為例(所有的深度學習框架數據格式都遵循同一個標準):
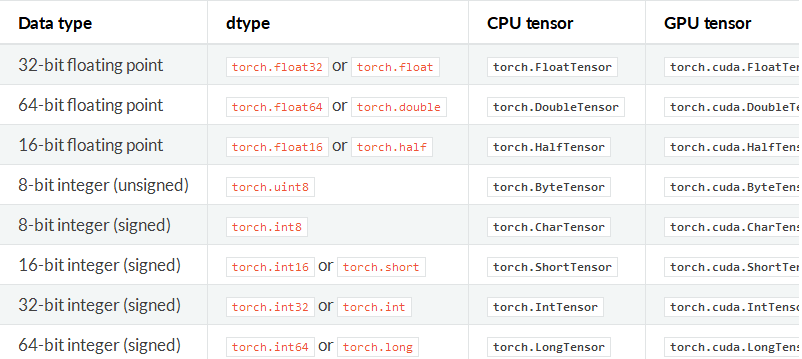
我們只需要看左邊的信息,在平常的訓練中,我們經常使用的一般是這兩種類型:
- float32 單精度浮點型
- int32 整型
一般一個8-bit的整型變量所佔的空間為1B也就是8bit。而32位的float則占4B也就是32bit。而雙精度浮點型double和長整型long在平常的訓練中我們一般不會使用。
ps:消費級顯卡對單精度計算有優化,服務器級別顯卡對雙精度計算有優化。
也就是說,假設有一幅RGB三通道真彩色圖片,長寬分別為500 x 500,數據類型為單精度浮點型,那麼這張圖所佔的顯存的大小為:500 x 500 x 3 x 4B = 3M。
而一個(256,3,100,100)-(N,C,H,W)的FloatTensor所佔的空間為256 x 3 x 100 x 100 x 4B = 31M
不多是吧,沒關係,好戲才剛剛開始。
顯存去哪兒了
看起來一張圖片(3x256x256)和卷積層(256x100x100)所佔的空間並不大,那為什麼我們的顯存依舊還是用的比較多,原因很簡單,佔用顯存比較多空間的並不是我們輸入圖像,而是神經網絡中的中間變量以及使用optimizer算法時產生的巨量的中間參數。
我們首先來簡單計算一下Vgg16這個net需要佔用的顯存:
通常一個模型佔用的顯存也就是兩部分:
- 模型自身的參數(params)
- 模型計算產生的中間變量(memory)
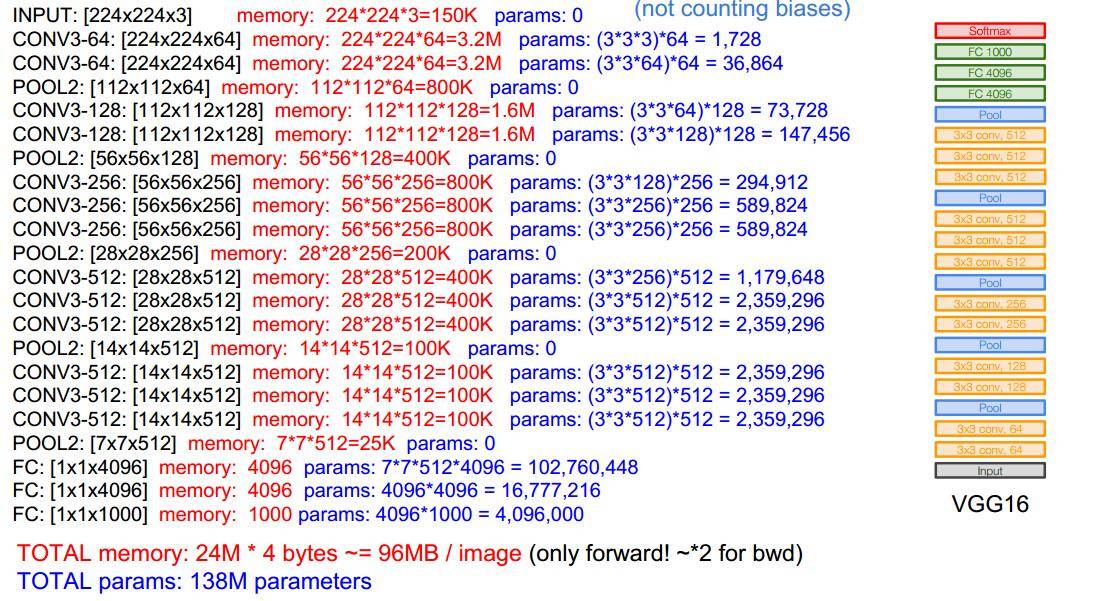
圖片來自cs231n,這是一個典型的sequential-net,自上而下很順暢,我們可以看到我們輸入的是一張224x224x3的三通道圖像,可以看到一張圖像只佔用150x4k,但上面是150k,這是因為這裡在計算的時候默認的數據格式是8-bit而不是32-bit,所以最後的結果要乘上一個4。
我們可以看到,左邊的memory值代表:圖像輸入進去,圖片以及所產生的中間卷積層所佔的空間。我們都知道,這些形形色色的深層卷積層也就是深度神經網絡進行「思考」的過程:
圖片從3通道變為64 –> 128 –> 256 –> 512 …. 這些都是卷積層,而我們的顯存也主要是他們佔用了。
還有上面右邊的params,這些是神經網絡的權重大小,可以看到第一層卷積是3×3,而輸入圖像的通道是3,輸出通道是64,所以很顯然,第一個卷積層權重所佔的空間是 (3 x 3 x 3) x 64。
另外還有一個需要注意的是中間變量在backward的時候會翻倍!
舉個例子,下面是一個計算圖,輸入x,經過中間結果z,然後得到最終變量L:
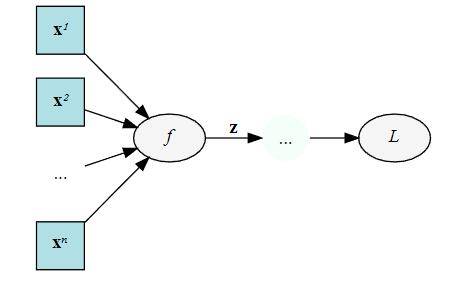
我們在backward的時候需要保存下來的中間值。輸出是L,然後輸入x,我們在backward的時候要求L對x的梯度,這個時候就需要在計算鏈L和x中間的z:

dz/dx這個中間值當然要保留下來以用於計算,所以粗略估計,backward的時候中間變量的佔用了是forward的兩倍!
優化器和動量
要注意,優化器也會佔用我們的顯存!
為什麼,看這個式子:

上式是典型的SGD隨機下降法的總體公式,權重W在進行更新的時候,會產生保存中間變量 ,也就是在優化的時候,模型中的params參數所佔用的顯存量會翻倍。
,也就是在優化的時候,模型中的params參數所佔用的顯存量會翻倍。
當然這只是SGD優化器,其他複雜的優化器如果在計算時需要的中間變量多的時候,就會佔用更多的內存。
模型中哪些層會佔用顯存
有參數的層即會佔用顯存的層。我們一般的卷積層都會佔用顯存,而我們經常使用的激活層Relu沒有參數就不會佔用了。
佔用顯存的層一般是:
- 卷積層,通常的conv2d
- 全連接層,也就是Linear層
- BatchNorm層
- Embedding層
而不佔用顯存的則是:
- 剛才說到的激活層Relu等
- 池化層
- Dropout層
具體計算方式:
- Conv2d(Cin, Cout, K): 參數數目:Cin × Cout × K × K
- Linear(M->N): 參數數目:M×N
- BatchNorm(N): 參數數目: 2N
- Embedding(N,W): 參數數目: N × W
額外的顯存
總結一下,我們在總體的訓練中,佔用顯存大概分以下幾類:
- 模型中的參數(卷積層或其他有參數的層)
- 模型在計算時產生的中間參數(也就是輸入圖像在計算時每一層產生的輸入和輸出)
- backward的時候產生的額外的中間參數
- 優化器在優化時產生的額外的模型參數
但其實,我們佔用的顯存空間為什麼比我們理論計算的還要大,原因大概是因為深度學習框架一些額外的開銷吧,不過如果通過上面公式,理論計算出來的顯存和實際不會差太多的。
如何優化
優化除了算法層的優化,最基本的優化無非也就一下幾點:
- 減少輸入圖像的尺寸
- 減少batch,減少每次的輸入圖像數量
- 多使用下採樣,池化層
- 一些神經網絡層可以進行小優化,利用relu層中設置
inplace - 購買顯存更大的顯卡
- 從深度學習框架上面進行優化
撩我吧
- 如果你與我志同道合於此,老潘很願意與你交流;
- 如果你喜歡老潘的內容,歡迎關注和支持。
- 如果你喜歡我的文章,希望點贊👍 收藏 📁 評論 💬 三連一下~
想知道老潘是如何學習踩坑的,想與我交流問題~請關注公眾號「oldpan博客」。
老潘也會整理一些自己的私藏,希望能幫助到大家,點擊神秘傳送門獲取。


