Java中的锁原理–AQS
- 2019 年 12 月 4 日
- 筆記
大家或多或少会接触一些线程安全问题,什么是线程安全?
通俗的来讲,某个函数被多个线程调用多次,都能够处理各个线程中的局部变量,并且计算结果正确,我们一般称为线程安全。
如何解决线程安全问题?
一般有三种方式
- 使用 ThreadLocal 避免线程共享变量
- 使用 synchronized 和 Lock 进行同步控制。
- 使用原子变量声明变量。
Lock 的实现原理是什么?
AQS(AbstracctQueuedSynchronized) 队列同步器,是用来构建锁或者其他同步器组件的基础框架。
AQS 使用了一个 int 变量来表示同步状态,通过内置的 FIFO 队列来完成资源获取线程的排队工作。
经常使用的同步组件ReentrantLock、ReentrantReadWriteLock和 CountDownLatch 等都是基于同步器实现的。
AQS 主要包含两点,一个是同步状态,第二个是队列。
AQS 是怎么实现线程同步的?主要包括同步队列、独占是同步状态的释放和获取、共享式同步状态的释放和获取。
同步器依赖的是同步队列的来进行同步状态的管理。
同步队列的结构
队列中的节点 Node 是构成同步器的基础。
static final class Node { /** Marker to indicate a node is waiting in shared mode */ static final Node SHARED = new Node(); /** Marker to indicate a node is waiting in exclusive mode */ static final Node EXCLUSIVE = null; /** waitStatus value to indicate thread has cancelled */ static final int CANCELLED = 1; /** waitStatus value to indicate successor's thread needs unparking */ static final int SIGNAL = -1; /** waitStatus value to indicate thread is waiting on condition */ static final int CONDITION = -2; /** * waitStatus value to indicate the next acquireShared should * unconditionally propagate */ static final int PROPAGATE = -3; /** * Status field, taking on only the values: * SIGNAL: The successor of this node is (or will soon be) * blocked (via park), so the current node must * unpark its successor when it releases or * cancels. To avoid races, acquire methods must * first indicate they need a signal, * then retry the atomic acquire, and then, * on failure, block. * CANCELLED: This node is cancelled due to timeout or interrupt. * Nodes never leave this state. In particular, * a thread with cancelled node never again blocks. * CONDITION: This node is currently on a condition queue. * It will not be used as a sync queue node * until transferred, at which time the status * will be set to 0. (Use of this value here has * nothing to do with the other uses of the * field, but simplifies mechanics.) * PROPAGATE: A releaseShared should be propagated to other * nodes. This is set (for head node only) in * doReleaseShared to ensure propagation * continues, even if other operations have * since intervened. * 0: None of the above * * The values are arranged numerically to simplify use. * Non-negative values mean that a node doesn't need to * signal. So, most code doesn't need to check for particular * values, just for sign. * * The field is initialized to 0 for normal sync nodes, and * CONDITION for condition nodes. It is modified using CAS * (or when possible, unconditional volatile writes). */ volatile int waitStatus; /** * Link to predecessor node that current node/thread relies on * for checking waitStatus. Assigned during enqueuing, and nulled * out (for sake of GC) only upon dequeuing. Also, upon * cancellation of a predecessor, we short-circuit while * finding a non-cancelled one, which will always exist * because the head node is never cancelled: A node becomes * head only as a result of successful acquire. A * cancelled thread never succeeds in acquiring, and a thread only * cancels itself, not any other node. */ volatile Node prev; /** * Link to the successor node that the current node/thread * unparks upon release. Assigned during enqueuing, adjusted * when bypassing cancelled predecessors, and nulled out (for * sake of GC) when dequeued. The enq operation does not * assign next field of a predecessor until after attachment, * so seeing a null next field does not necessarily mean that * node is at end of queue. However, if a next field appears * to be null, we can scan prev's from the tail to * double-check. The next field of cancelled nodes is set to * point to the node itself instead of null, to make life * easier for isOnSyncQueue. */ volatile Node next; /** * The thread that enqueued this node. Initialized on * construction and nulled out after use. */ volatile Thread thread; /** * Link to next node waiting on condition, or the special * value SHARED. Because condition queues are accessed only * when holding in exclusive mode, we just need a simple * linked queue to hold nodes while they are waiting on * conditions. They are then transferred to the queue to * re-acquire. And because conditions can only be exclusive, * we save a field by using special value to indicate shared * mode. */ Node nextWaiter; /** * Returns true if node is waiting in shared mode. */ final boolean isShared() { return nextWaiter == SHARED; } /** * Returns previous node, or throws NullPointerException if null. * Use when predecessor cannot be null. The null check could * be elided, but is present to help the VM. * * @return the predecessor of this node */ final Node predecessor() throws NullPointerException { Node p = prev; if (p == null) throw new NullPointerException(); else return p; } Node() { // Used to establish initial head or SHARED marker } Node(Thread thread, Node mode) { // Used by addWaiter this.nextWaiter = mode; this.thread = thread; } Node(Thread thread, int waitStatus) { // Used by Condition this.waitStatus = waitStatus; this.thread = thread; } }
Node 的构造方法可以看到,包含了线程 Thread 和 状态 waitStatus 或者 Thread 和 nextWaiter(Node) 。
/** 值为1,由于同步队列中等待的线程超时或者被中断,需要到同步队列中取消等待,节点进入该状态将不会变*/ static final int CANCELLED = 1; /**后继节点的线程处于阻塞状态,而如果当前节点的线程如果释放同步状态或者被取消,通知后继节点,使得后继节点可以运行*/ static final int SIGNAL = -1; /** 值为-2 节点在等待队列中,节点线程等待在Condition上,当其他线程对 Condition 调用了 signal() 方法后,该节点会从等待队列转移到同步队列中,进行同步状态的获取 */ static final int CONDITION = -2;
节点加入到同步队列
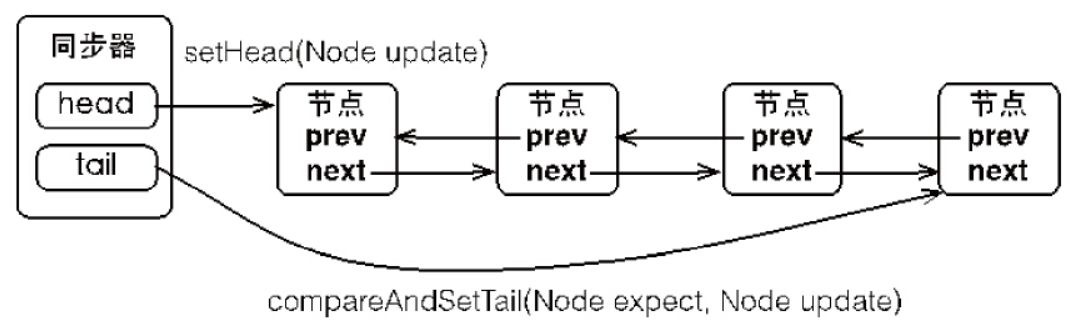
同步器拥有首节点 head 和 尾节点 tail 没有成功获取同步状态的线程将会组成Node 加入该队列的尾部。这个加入队尾的过程需要是线程安全的。同步器提供了一个基于 CAS 的设置尾节点的方法 compareAndSetTail(Node expt, Node update) 需要传递当前线程认为的尾节点 expt 和当前节点 update。

为什么 CAS 能够保证线程安全?
java 中的 CAS 是对 cmpxchg 的封装。
cmpxchg 中x86 中有 CAS 指令。 cmpxchg是汇编指令 作用:比较并交换操作数. 如:CMPXCHG r/m,r 将累加器AL/AX/EAX/RAX中的值与首操作数(目的操作数)比较,如果相等,第2操作数(源操作数)的值装载到首操作数,zf置1。如果不等, 首操作数的值装载到AL/AX/EAX/RAX并将zf清0 该指令只能用于486及其后继机型。第2操作数(源操作数)只能用8位、16位或32位寄存器。第1操作数(目地操作数)则可用寄存器或任一种存储器寻址方式
cmpxchg 功能就是保证一次只原子性的修改一个变量。
线程释放同步状态,节点出队
首节点的线程在释放同步状态时,将会唤醒后继节点。而后继节点将会在获取同步状态时,将自己设置成首节点。

设置首节点是通过获取同步状态成功的线程来完成的,由于只有一个线程能够成功的获取同步状态,因此,不需要使用 CAS 来保证只需要将首节点的后继节点设置成首节点即可。
