Slam筆記I
- 2020 年 3 月 29 日
- 筆記
視覺Slam筆記I
第二講-三位空間剛體運動
點與坐標系:
基礎概念:
-
坐標系:左手系和右手系。右手系更常用。定義坐標系時,會定義世界坐標系,相機坐標系,以及其他關心對象的坐標系。空間中任意一點可由空間的基的線性表出。
-
加減法:用坐標描述更方便。
-
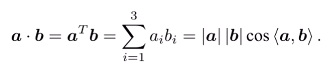
內積:點乘得數,即
-
外積:叉乘得向量,即
 右手系下,得到按照右手定則獲取的向量。
右手系下,得到按照右手定則獲取的向量。 -
坐標系間的變換:
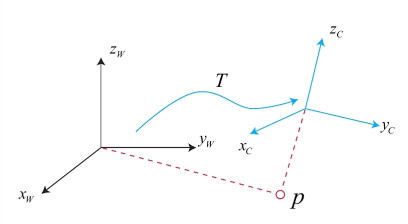
通過平移(向量的加減)和旋轉(有多種描述方式,見下) -
2D情況:二維坐標點表示位置+一個旋轉角表示朝向。
-
3D情況:三維坐標點表示位置+一個旋轉角(角度間的變換使用旋轉,旋轉方式有多種,見下)。
旋轉矩陣:(描述旋轉的第一種方式)
坐標系 (e_1,e_2,e_3)經過旋轉變成 (e'_1,e'_2,e'_3),在三維空間中,向量 a保持不動,那麼如何表出它在 (e'_1,e'_2,e'_3)下的坐標:
- 線性表出法向量
a坐標:兩坐標系實質是分別用兩組不同的基去表示同一個點,則兩者的線性組合是相等的: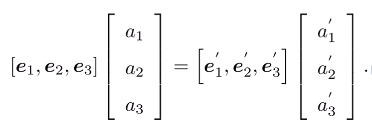
- 左右兩邊同時左乘
(e_1,e_2,e_3)的轉置,得到: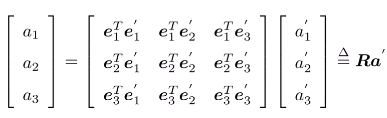
- R即為旋轉矩陣。
- 性質:
- R是一個正交矩陣(矩陣的逆即矩陣的轉置,或轉置×本身即為一個單位矩陣)。
- R的行列式值為1。
- 滿足上述性質的矩陣都可以稱為旋轉矩陣,使用集合表示:

,又稱特殊正交群SO(3)。 - 固定表示方式(下標順序):
 且滿足矩陣關係:
且滿足矩陣關係: 。
。
因此,空間中不同坐標系下點坐標的變換可以使用: 即旋轉+平移的形式完全描述
即旋轉+平移的形式完全描述
- 理論依據:歐拉定理,剛體在三維空間中的一般運動,可分解為剛體上方某一點的平移,以及繞經過此點的旋轉軸的轉動。
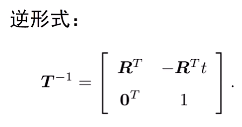
但是,這種表示方式在多次進行變換時會有不便( ),因此使用增廣的方式進行表示:
),因此使用增廣的方式進行表示:

- 其中,
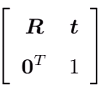 稱為變換矩陣,
稱為變換矩陣, 的形式稱為齊次坐標。
的形式稱為齊次坐標。 - 齊次坐標性質:齊次坐標乘上任意非0常數時仍表達同一坐標
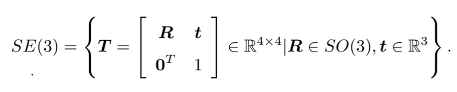
- 變換矩陣的集合:稱為特殊歐式群SE(3):
旋轉向量和歐拉角:
旋轉矩陣在實際中更常用,但這些概念也是需要清楚的。
旋轉矩陣R是一個3×3的矩陣,有九個元素,但僅有三個自由度,也就是存在描述方式上的冗餘,那麼能否以更少的元素表達旋轉?
剛體旋轉存在一個轉軸(向量),還有轉過的角度,於是想用角度乘以向量(單位化過後)的形式去描述旋轉。
旋轉向量
-
一個向量,方向為旋轉軸方向,長度為轉過的角度。(單位向量乘角度大小)
-
又稱角軸/軸角。
-
羅德里格斯公式可以將旋轉向量(n,theta)轉換成旋轉矩陣R:

-
旋轉矩陣R也可以轉換成旋轉向量(n,theta):
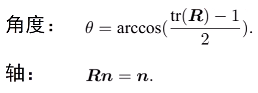 n是特徵向量。
n是特徵向量。
歐拉角
- 將旋轉分解成三個方向上的轉動,常用順序為yaw-pitch-roll(也就是繞Z-Y-X方式轉,注意 ,不同地方在繞Z轉之後,所繞的Y軸可能是原來的Y軸,也可能是轉動後的Y軸)

- 萬向鎖(Gimbal Lock):歐拉角存在奇異性(特定值下,旋轉的自由度減1)
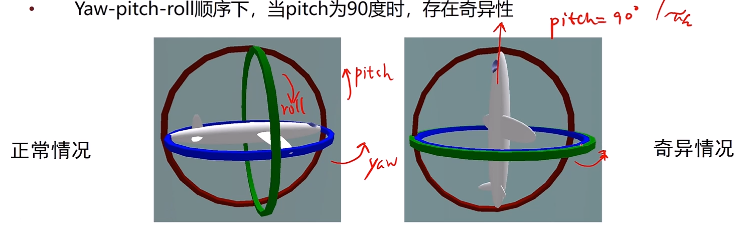 在pitch方向旋轉完畢後,roll方向旋轉和yaw方向旋轉是重合的。由此,歐拉角不適合插值或迭代,故不常用。
在pitch方向旋轉完畢後,roll方向旋轉和yaw方向旋轉是重合的。由此,歐拉角不適合插值或迭代,故不常用。
四元數:
吸取了旋轉矩陣和旋轉向量、歐拉角的優點,是一種優秀的描述方式。
- 2D情況下,可以用單位複數表達旋轉:
- 用z乘以i,相當於旋轉了90度(
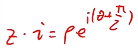 ),乘-i轉動-90度。
),乘-i轉動-90度。
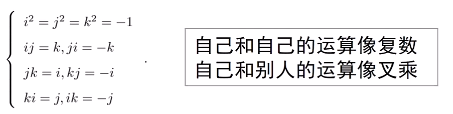
在三維情況下,四元數可作為擴充定義的複數
-
特點1:有三個虛部+一個實部

-
特點2:虛部之間存在關係:
-
單位四元數可以表達三維空間的旋轉:

-
四元數也能定義很多運算:
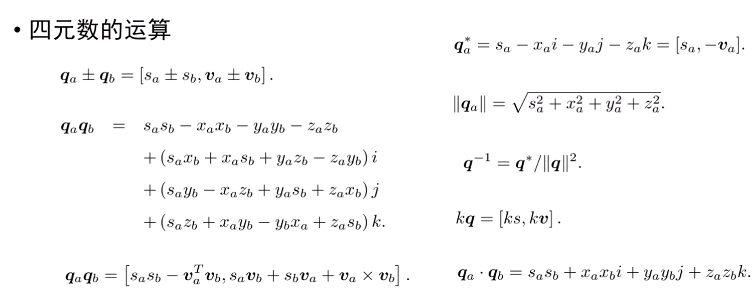
-
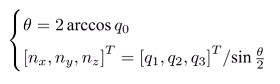
四元數轉換成旋轉向量:
-
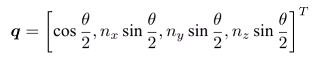
旋轉向量轉換成四元數:
-
用四元數表示旋轉: