跟我學Python影像處理丨基於灰度三維圖的影像頂帽運算和黑帽運算
摘要:本篇文章結合灰度三維影像講解影像頂帽運算和影像黑貓運算,通過Python調用OpenCV函數實現。
本文分享自華為雲社區《[Python影像處理] 十三.基於灰度三維圖的影像頂帽運算和黑帽運算》,作者: eastmount。
本篇文章繼續深入,結合灰度三維影像講解影像頂帽運算和影像黑貓運算,通過Python調用OpenCV函數實現。
一.影像頂帽運算
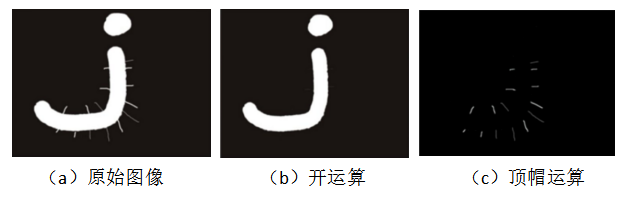
影像頂帽運算(top-hat transformation)又稱為影像禮帽運算,它是用原始影像減去影像開運算後的結果,常用於解決由於光照不均勻影像分割出錯的問題。其公式定義如下:

影像頂帽運算是用一個結構元通過開運算從一幅影像中刪除物體,校正不均勻光照的影響,其效果圖如下圖所示。
在Python中,影像頂帽運算主要調用morphologyEx()實現,其中參數cv2.MORPH_TOPHAT表示頂帽處理,函數原型如下:
dst = cv2.morphologyEx(src, cv2.MORPH_TOPHAT, kernel)
- src表示原始影像
- cv2.MORPH_TOPHAT表示影像頂帽運算
- kernel表示卷積核,可以用numpy.ones()函數構建
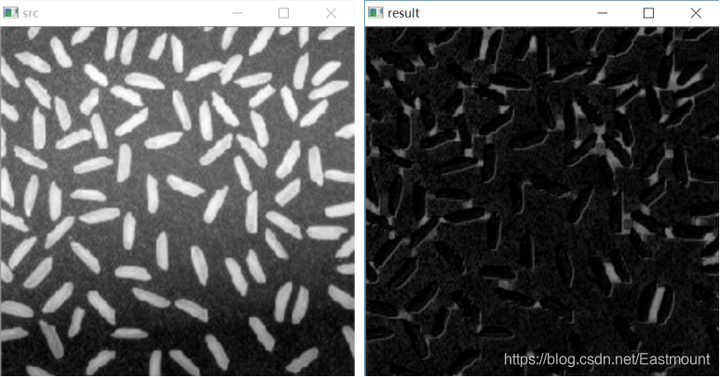
假設存在一張光照不均勻的米粒影像,如圖所示,我們需要調用影像頂帽運算解決光照不均勻的問題。其Python程式碼如下所示:

#encoding:utf-8 import cv2 import numpy as np #讀取圖片 src = cv2.imread('test06.png', cv2.IMREAD_UNCHANGED) #設置卷積核 kernel = np.ones((10,10), np.uint8) #影像頂帽運算 result = cv2.morphologyEx(src, cv2.MORPH_TOPHAT, kernel) #顯示影像 cv2.imshow("src", src) cv2.imshow("result", result) #等待顯示 cv2.waitKey(0) cv2.destroyAllWindows()
其運行結果如下,它有效地將米粒與背景分離開來。

二.影像黑帽運算
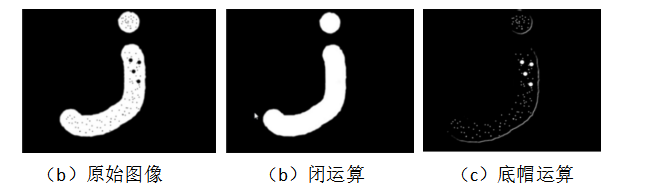
影像底帽運算(bottom-hat transformation)又稱為影像黑帽運算,它是用影像閉運算操作減去原始影像後的結果,從而獲取影像內部的小孔或前景色中黑點,也常用於解決由於光照不均勻影像分割出錯的問題。其公式定義如下:

影像底帽運算是用一個結構元通過閉運算從一幅影像中刪除物體,常用於校正不均勻光照的影響。其效果圖如下圖所示。
在Python中,影像底帽運算主要調用morphologyEx()實現,其中參數cv2.MORPH_BLACKHAT表示底帽或黑帽處理,函數原型如下:
dst = cv2.morphologyEx(src, cv2.MORPH_BLACKHAT, kernel)
- src表示原始影像
- cv2.MORPH_BLACKHAT表示影像底帽或黑帽運算
- kernel表示卷積核,可以用numpy.ones()函數構建
Python實現影像底帽運算的程式碼如下所示:
#encoding:utf-8 import cv2 import numpy as np #讀取圖片 src = cv2.imread('test06.png', cv2.IMREAD_UNCHANGED) #設置卷積核 kernel = np.ones((10, 10), np.uint8) #影像黑帽運算 result = cv2.morphologyEx(src, cv2.MORPH_BLACKHAT, kernel) #顯示影像 cv2.imshow("src", src) cv2.imshow("result", result) #等待顯示 cv2.waitKey(0) cv2.destroyAllWindows()
其運行結果如圖所示:
三.基於灰度三維圖的頂帽黑帽運算
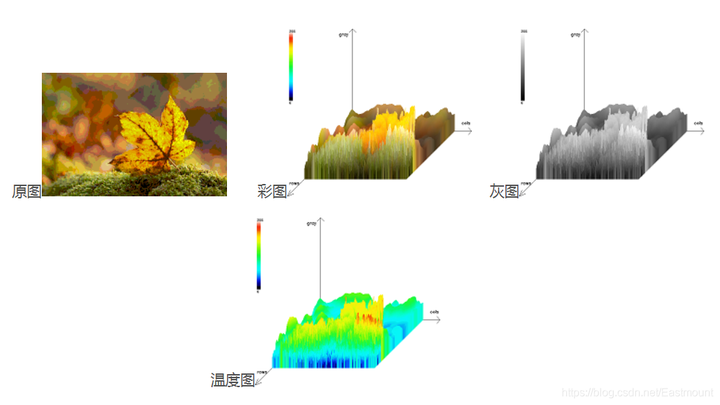
為什麼影像頂帽運算會消除光照不均勻的效果呢?通常可以利用灰度三維圖來進行解釋該演算法。灰度三維圖主要調用Axes3D包實現,對原圖繪製灰度三維圖的程式碼如下:
# -*- coding: utf-8 -*- import numpy as np import cv2 as cv import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D from matplotlib import cm from matplotlib.ticker import LinearLocator, FormatStrFormatter #讀取影像 img = cv.imread("test06.png") img = cv.cvtColor(img,cv.COLOR_BGR2GRAY) imgd = np.array(img) #image類轉numpy #準備數據 sp = img.shape h = int(sp[0]) #影像高度(rows) w = int(sp[1]) #影像寬度(colums) of image #繪圖初始處理 fig = plt.figure(figsize=(16,12)) ax = fig.gca(projection="3d") x = np.arange(0, w, 1) y = np.arange(0, h, 1) x, y = np.meshgrid(x,y) z = imgd surf = ax.plot_surface(x, y, z, cmap=cm.coolwarm) #自定義z軸 ax.set_zlim(-10, 255) ax.zaxis.set_major_locator(LinearLocator(10)) #設置z軸網格線的疏密 #將z的value字元串轉為float並保留2位小數 ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f')) # 設置坐標軸的label和標題 ax.set_xlabel('x', size=15) ax.set_ylabel('y', size=15) ax.set_zlabel('z', size=15) ax.set_title("surface plot", weight='bold', size=20) #添加右側的色卡條 fig.colorbar(surf, shrink=0.6, aspect=8) plt.show()
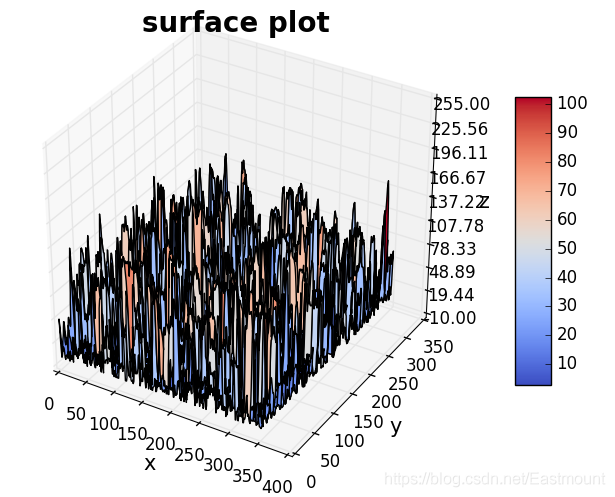
運行結果如下圖所示:
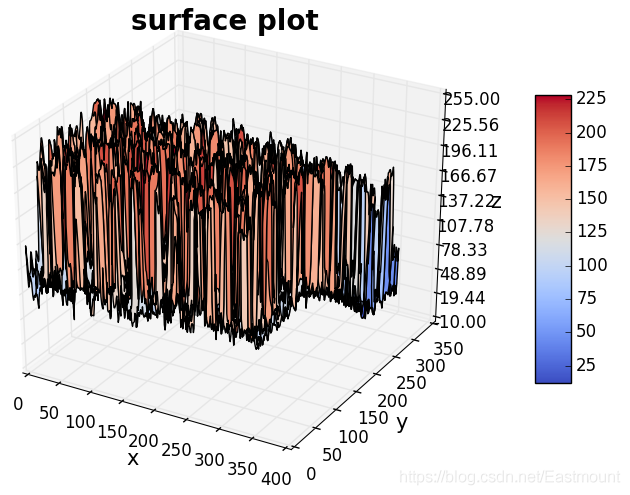
從影像中的像素走勢顯示了該圖受各部分光照不均勻的影響,從而造成背景灰度不均現象,其中凹陷對應影像中灰度值比較小的區域。而通過影像白帽運算後的影像灰度三維圖的程式碼如下:
# -*- coding: utf-8 -*- import numpy as np import cv2 as cv import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D from matplotlib import cm from matplotlib.ticker import LinearLocator, FormatStrFormatter #讀取影像 img = cv.imread("test06.png") img = cv.cvtColor(img,cv.COLOR_BGR2GRAY) #影像黑帽運算 kernel = np.ones((10,10), np.uint8) result = cv.morphologyEx(img, cv.MORPH_BLACKHAT, kernel) #image類轉numpy imgd = np.array(result) #準備數據 sp = result.shape h = int(sp[0]) #影像高度(rows) w = int(sp[1]) #影像寬度(colums) of image #繪圖初始處理 fig = plt.figure(figsize=(8,6)) ax = fig.gca(projection="3d") x = np.arange(0, w, 1) y = np.arange(0, h, 1) x, y = np.meshgrid(x,y) z = imgd surf = ax.plot_surface(x, y, z, cmap=cm.coolwarm) #自定義z軸 ax.set_zlim(-10, 255) ax.zaxis.set_major_locator(LinearLocator(10)) #設置z軸網格線的疏密 #將z的value字元串轉為float並保留2位小數 ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f')) # 設置坐標軸的label和標題 ax.set_xlabel('x', size=15) ax.set_ylabel('y', size=15) ax.set_zlabel('z', size=15) ax.set_title("surface plot", weight='bold', size=20) #添加右側的色卡條 fig.colorbar(surf, shrink=0.6, aspect=8) plt.show()
效果圖如下所示,對應的灰度更集中於10至100區間,由此證明了不均勻的背景被大致消除了,有利於後續的閾值分割或影像分割。