[原創]一種自動化九點標定工具原理(包涵部分源碼)
-
什麼是標定?
- 工業應用中相機拍到一個mark點的坐標為C1(Cx,Cy),C1點對應的龍門架/機械手等執行端對應的坐標是多少?
- 標定就是解決這個問題,如相機拍到一個點坐標C1(Cx,Cy),通過標定公式的計算得到點R1(Rx,Ry),R1就是龍門架/機械手坐標系的真實點位
- C1與R1之間存在一種固定的關係,求解這個關係的過程叫做標定
-
為什麼是9點標定?
- C1與R1之間的關係只有三種平移、縮放、旋轉
- 矩陣中有對三種關係的公式如下:
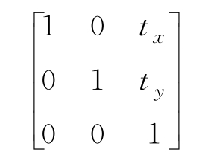
- 平移矩陣公式
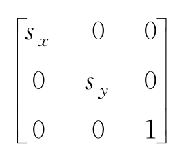
- 縮放矩陣公式
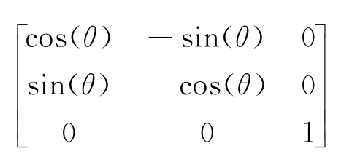
- 旋轉矩陣公式
- 上面三種矩陣相乘合成一個矩陣就是仿射變換矩陣
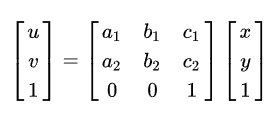
- 最後一個矩陣是根據前3個矩陣相乘得到,故為得到最終的放射變換矩陣,需要知道 Tx,Ty,Sx,Sy,θ這5個參數。為得到5個參數至少需要5個不同等式。
- 故此我們得出結論最少5個點我們就可以推到出最終的放射變換矩陣。
- 那為什麼是9點標定呢?答案是為了提高精度,通過9個點我們可以有N種組合算出結果,基於這些結果我們求類似於平均值的東西提高精度
- 那為什麼不是10個,11個或更多點呢?答案是9個點的計算已經基本滿足大家對精度的要求了,如π=3.1415926已經滿足計算精度了,就沒必要再把π計算到小數點後100位了
-
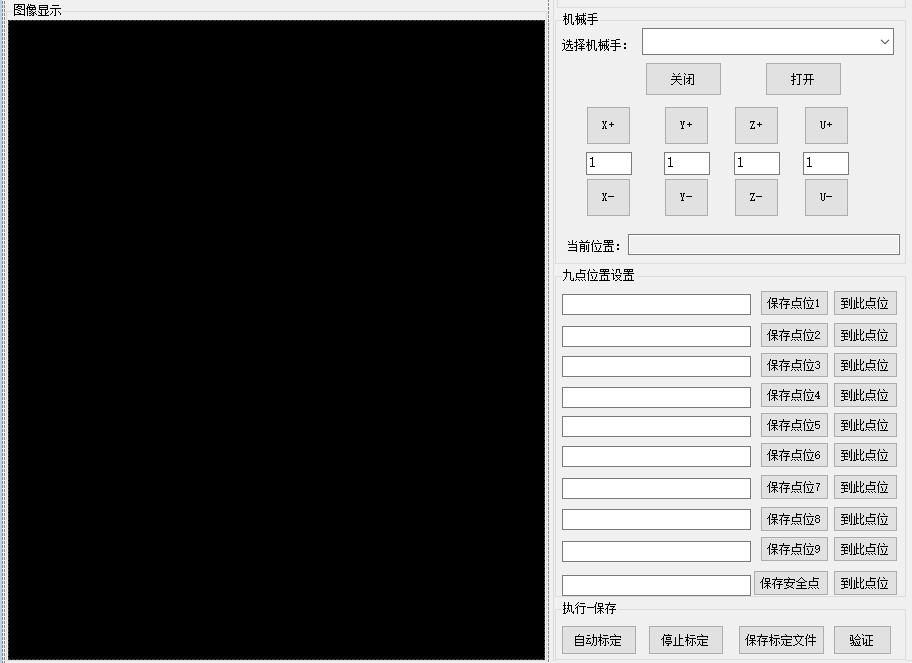
怎麼實現9點標定呢?
- 拿到9個相機點位[C1,C2…C9],同時拿到這9個點對應的機械手或龍門架真實坐標[R1,R2…R9]
- 把上面數據套入halcon的vector_to_hom_mat2d運算元,就可以得到放射變換矩陣了
*像素坐標
Row1:=[1,2,3,4,5,6,1,2,3,4,5,6,1,2,3,4,5,6]
Column1:=[1,1,1,1,1,1,2,2,2,2,2,2,3,3,3,3,3,3]
*機械坐標
Row2:=[50,51.999,54.999,56.999,59.999,62.996,-4.999,-3,0,1.999,4.999,7.995,-59.998,-57.001,-55.001,-52.001,-49.003,-45.005]
Column2:=[-93.3,-47.299,0.002,45.499,91.498,135.493,-92.301,-44.3,0,46.999,91.497,135.494,-90.297,-44.297,1.003,46.999,91.497,134.494]
*求解放射變換矩陣
vector_to_hom_mat2d (Row1, Column1, Row2, Column2, HomMat2D)
*保存變換矩陣到HomMat2D.mat中
serialize_hom_mat2d (HomMat2D, SerializedItemHandle)
open_file ('HomMat2D.mat', 'output_binary', FileHandle)
fwrite_serialized_item (FileHandle, SerializedItemHandle)
close_file (FileHandle)
-
傳統的9點標定工具怎麼做?
- 求解9點工具的難點在於怎麼得到相機拍照點C1對應的真實坐標R1?
- 傳統的作法是在機械手或龍門架的執行端下掛一個針尖。讓龍門架/機械手到達標定板的點位1使針尖與點位1中心重合,記錄真實位置,同時通過拍照得出點位1的相機坐標
-
還有沒有更方便的9點標定工具?其原理是什麼?
- 有,其核心原理是取消針尖,通過旋轉180度方式求解出相機坐標點C1
- 如機械手在物理點位R1(Rx,Ry)拍照的到此mark點對應的相機坐標C1(Cx1,Cy1),然後讓機械手旋轉180度再次拍照的到mark點對應相機坐標C2(Cx2,Cy2)。那麼物理點R1(Rx,Ry)對應的相機的點位未C1,C2的中心點。 因為物料點圍繞自己旋轉真實點位並未發生變化。
- 通過這種方法就可以實現自動化的9點標定工具
-
此工具適用範圍
- 此工具只適用於固定相機(眼在手外)的標定,如底部相機,頂部固定相機。
- 對於相機隨龍門架/機械手移動(眼在手上)的標定請聽下回分解
-
源碼
private Position updatePoiMatrix(Position pcbPoi, Position dstPoi)
{
this.currentRobot.GoToPosition(pcbPoi);
this.currentCylinder.Open();
this.currentRobot.GoToPosition(dstPoi);
this.currentRobot.GoToPosition(dstPoi);
this.currentCylinder.Close();
Thread.Sleep(600);
Position pUp = dstPoi.Copy();
pUp.Z = this.currentRobot.GetSafeZ();
this.currentRobot.GoToPosition(pUp);
this.currentRobot.GoToPosition(safePoi);
Position poi1 = this.getMarkPoi();
this.currentRobot.GoToPosition(dstPoi);
this.currentCylinder.Open();
Position dstPoi2 = dstPoi.Copy();
dstPoi2.Z = this.currentRobot.GetSafeZ();
this.currentRobot.GoToPosition(dstPoi2);
if (dstPoi2.U > 90)
{
dstPoi2.U -= 180;
}
else if (dstPoi2.U < -90)
{
dstPoi2.U += 180;
}
else
{
dstPoi2.U += 180;
}
this.currentRobot.GoToPosition(dstPoi2);
dstPoi2.Z = dstPoi.Z;
this.currentRobot.GoToPosition(dstPoi2);
this.currentCylinder.Close();
Thread.Sleep(600);
this.currentRobot.GoToPosition(safePoi);
Position poi2 = this.getMarkPoi();
imagePoiList.Add(new Position() { X = (poi1.X + poi2.X) / 2, Y = (poi1.Y + poi2.Y) / 2 });
robotPoiList.Add(dstPoi2.Copy());
return dstPoi2;
}
public void SaveMat(List<Position> imageList, List<Position> robotPoiList, string path)
{
HTuple imageXList = new HTuple(), imageYList = new HTuple();
HTuple robotXList = new HTuple(), robotYList = new HTuple();
for (int i = 0; i < imageList.Count; i++)
{
imageXList[i] = imageList[i].X;
imageYList[i] = imageList[i].Y;
robotXList[i] = robotPoiList[i].X;
robotYList[i] = robotPoiList[i].Y;
}
HTuple hv_HomMat2D = new HTuple(), hv_SerializedItemHandle = new HTuple();
HTuple hv_FileHandle = new HTuple();
hv_HomMat2D.Dispose();
HOperatorSet.VectorToHomMat2d(imageXList, imageYList, robotXList, robotYList, out hv_HomMat2D);
hv_SerializedItemHandle.Dispose();
HOperatorSet.SerializeHomMat2d(hv_HomMat2D, out hv_SerializedItemHandle);
hv_FileHandle.Dispose();
HOperatorSet.OpenFile(path, "output_binary", out hv_FileHandle);
HOperatorSet.FwriteSerializedItem(hv_FileHandle, hv_SerializedItemHandle);
HOperatorSet.CloseFile(hv_FileHandle);
imageXList.Dispose();
imageYList.Dispose();
robotXList.Dispose();
robotYList.Dispose();
hv_HomMat2D.Dispose();
hv_SerializedItemHandle.Dispose();
hv_FileHandle.Dispose();
}







