強化學習-學習筆記9 | Multi-Step-TD-Target
這篇筆記依然屬於TD演算法的範疇。Multi-Step-TD-Target 是對 TD演算法的改進。
9. Multi-Step-TD-Target
9.1 Review Sarsa & Q-Learning
- Sarsa
- 訓練 動作價值函數 \(Q_\pi(s,a)\);
- TD Target 是 \(y_t = r_t + \gamma\cdot Q_\pi(s_{t+1},a_{t+1})\)
- Q-Learning
- 訓練 最優動作價值函數 Q-star;
- TD Target 是 \(y_t = r_t +\gamma \cdot \mathop{max}\limits_{a} Q^*({s_{t+1}},a)\)
- 注意,兩種演算法的 TD Target 的 r 部分 都只有一個獎勵 \(r_t\)
- 如果用多個獎勵,那麼 RL 的效果會更好;Multi-Step-TD-Target就是基於這種考慮提出的。
在第一篇強化學習的基礎概念篇中,就提到過,agent 會觀測到以下這個軌跡:
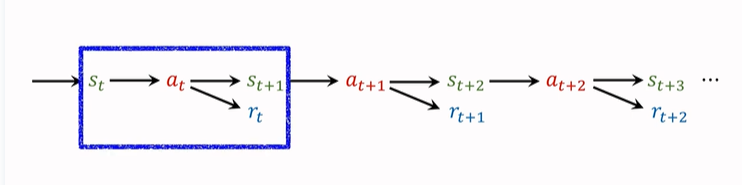
我們之前只使用一個 transition 來記錄動作、獎勵,並且更新 TD-Target。一個 transition 包括\((s_t,a_t,s_{t+1},r_t)\),只有一個獎勵 \(r_t\)。(如上圖藍框所示)。
這樣算出來的 TD Target 就是 One Step TD Target。
其實我們也可以一次使用多個 transition 中的獎勵,得到的 TD Target 就是 Multi-Step-TD-Target。如下圖藍框選擇了兩個 transition,同理接下來可以選後兩個 transition 。

9.2 多步折扣回報
Multi-Step Return.
折扣回報公式為:\(U_t=R_t+\gamma\cdot{U_{t+1}}\);
這個式子建立了 t 時刻和 t+1 時刻的 U 的關係,為了得到多步折扣回報,我們遞歸使用這個式子:
\(U_t=R_t+\gamma\cdot{U_{t+1}}\\=R_t+\gamma\cdot(R_{t+1}+\gamma\cdot{U_{t+2}})\\=R_t+\gamma\cdot{R_{t+1}}+\gamma^2\cdot{U_{t+2}}\)
這樣,我們就可以包含兩個獎勵,同理我們可以有三個獎勵……遞歸下去,包含 m個獎勵為:
\(U_t=\sum_{i=0}^{m-1}\gamma^i\cdot{R_{t+i}}+\gamma^m\cdot{U_{t+m}}\)
即:回報 \(U_t\) 等於 m 個獎勵的加權和,再加上 \(\gamma^m\cdot{U_{t+m}}\),後面這一項稱為 多步回報。
現在我們推出了 多步的 \(U_t\) 的公式,進一步可以推出 多步 \(y_t\) 的公式,即分別對等式兩側求期望,使隨機變數具體化:
-
Sarsa 的 m-step TD target:
\(y_t=∑_{i=0}^{m−1}\gamma^i\cdot r_{t+i}+\gamma^m\cdot{Q_\pi}(s_{t+m},a_{t+m})\)
注意:m=1 時,就是之前我們熟知的標準 TD Target。
多步的 TD Target 效果要比 單步 好。
-
Q-Learning 的 m-step TD target:
\(y_t = \sum_{i=0}^{m-1}\gamma^i{r_{t+i}}+\gamma^m\cdot\mathop{max}\limits_{a} Q^*({s_{t+m}},a)\)
同樣,m=1時,就是之前的TD Target。
9.3 單步 與 多步 的對比
-
單步 TD Target 中,只使用一個獎勵 \(r_t\);
-
如果用多步TD Target,則會使用多個獎勵:\(r_t,r_{t+1},…,r_{t+m-1}\)
聯想一下第二篇 價值學習 的旅途的例子,如果真實走過的路程佔比越高,不考慮 「成本」 的情況下,對於旅程花費時間的估計可靠性會更高。
-
m 是一個超參數,需要手動調整,如果調的合適,效果會好很多。
x. 參考教程
- 影片課程:深度強化學習(全)_嗶哩嗶哩_bilibili
- 影片原地址://www.youtube.com/user/wsszju
- 課件地址://github.com/wangshusen/DeepLearning

