從記憶體管理原理,窺探OS記憶體管理機制
摘要:本文將從最簡單的記憶體管理原理說起,帶大家一起窺探OS的記憶體管理機制,由此熟悉底層的記憶體管理機制,寫出高效的應用程式。
本文分享自華為雲社區《探索OS的記憶體管理原理》,作者:元閏子 。
前言
記憶體作為電腦系統的組成部分,跟開發人員的日常開發活動有著密切的聯繫,我們平時遇到的Segment Fault、OutOfMemory、Memory Leak、GC等都與它有關。本文所說的記憶體,指的是電腦系統中的主存(Main Memory),它位於存儲金字塔中CPU快取和磁碟之間,是程式運行不可或缺的一部分。

在電腦系統中,主存通常都是由作業系統(OS)來管理,而記憶體管理的細則對開發者來說是無感的。對於一個普通的開發者,他只需懂得如何調用程式語言的介面來進行記憶體申請和釋放,即可寫出一個可用的應用程式。如果你使用的是帶有垃圾回收機制的語言,如Java和Go,甚至都不用主動釋放記憶體。但如果你想寫出高效應用程式,熟悉OS的記憶體管理原理就變得很有必要了。
下面,我們將從最簡單的記憶體管理原理說起,帶大家一起窺探OS的記憶體管理機制,由此熟悉底層的記憶體管理機制,寫出高效的應用程式。
獨佔式記憶體管理
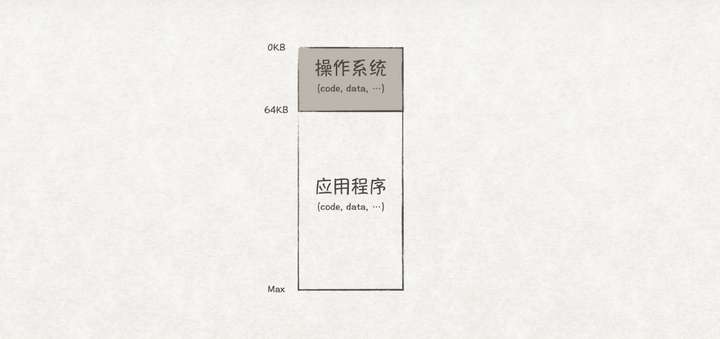
早期的單任務系統中,同一時刻只能有一個應用程式獨享所有的記憶體(除開OS佔用的記憶體),因此,記憶體管理可以很簡單,只需在記憶體上劃分兩個區域:
在多任務系統中,電腦系統已經可以做到多個任務並發運行。如果還是按照獨佔式的管理方式,那麼每次任務切換時,都會涉及多次記憶體和磁碟之間的數據拷貝,效率極其低下:

最直觀的解決方法就是讓所有程式的數據都常駐在記憶體中(假設記憶體足夠大),這樣就能避免數據拷貝了:

但這樣又會帶來另一個問題,程式之間的記憶體地址空間是沒有隔離的,也就是程式A可以修改程式B的記憶體數據。這樣的一個重大的安全問題是用戶所無法接受的,要解決該問題,就要藉助虛擬化的力量了。
虛擬地址空間
為了實現程式間記憶體的隔離,OS對物理記憶體做了一層虛擬化。OS為每個程式都虛擬化出一段記憶體空間,這段虛擬記憶體空間會映射到一段物理記憶體上。但對程式自身而言,它只能看到自己的虛擬地址空間,也就有獨佔整個記憶體的錯覺了。
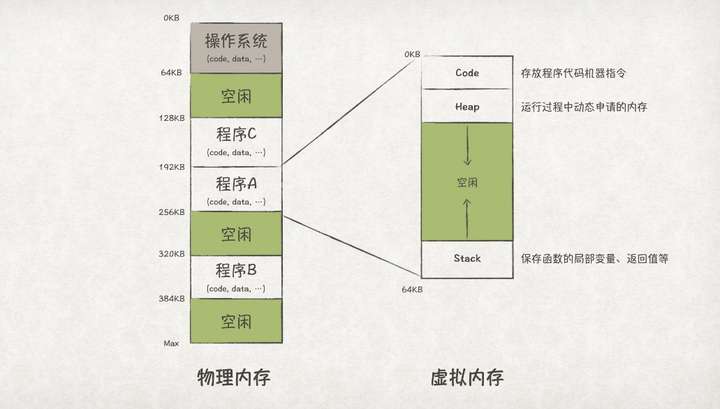
上圖中,虛擬記憶體空間分成了三個區域,其中Code區域存儲的是程式程式碼的機器指令;Heap區域存儲程式運行過程中動態申請的記憶體;Stack區域則是存儲函數入參、局部變數、返回值等。Heap和Stack會在程式運行過程中不斷增長,分別放置在虛擬記憶體空間的上方和下方,並往相反方向增長。
從虛擬地址空間到物理地址空間的映射,需要一個轉換的過程,完成這個轉換運算的部件就是MMU(memory management unit),也即記憶體管理單元,它位於CPU晶片之內。
要完成從虛擬地址到物理地址到轉換,MMU需要base和bound兩個暫存器。其中base暫存器用來存儲程式在物理記憶體上的基地址,比如在圖5中,程式A的基地址就是192KB;bound暫存器(有時候也叫limit暫存器)則保存虛擬地址空間的Size,主要用來避免越界訪問,比如圖5中程式A的size值為64K。那麼,基於這種方式的地址轉換公式是這樣的:
物理地址 = 虛擬地址 + 基地址
以圖5中程式A的地址轉換為例,當程式A嘗試訪問超過其bound範圍的地址時,物理地址會轉換失敗:

現在,我們再次仔細看下程式A的物理記憶體分布,如下圖7所示,中間有很大的一段空閑記憶體是「已申請,未使用」的空閑狀態。這也意味著即使這部分是空閑的,也無法再次分配給其他程式使用,這是一種巨大的空間浪費!為了解決這個記憶體利用率低下的問題,我們熟悉的段式記憶體管理出現了。

段式記憶體管理
在上一節中,我們發現如果以程式為單位去做記憶體管理,會存在記憶體利用率不足的問題。為了解決該問題,段式記憶體管理被引入。段(Segment)是邏輯上的概念,本質上是一塊連續的、有一定大小限制的記憶體區域,前文中,我們一共提到過3個段:Code、Heap和Stack。
段式記憶體管理以段為單位進行管理,它允許OS將每個段靈活地放置在物理記憶體的空閑位置上,因此也避免了「已申請,未使用」的記憶體區域出現:

地址轉換
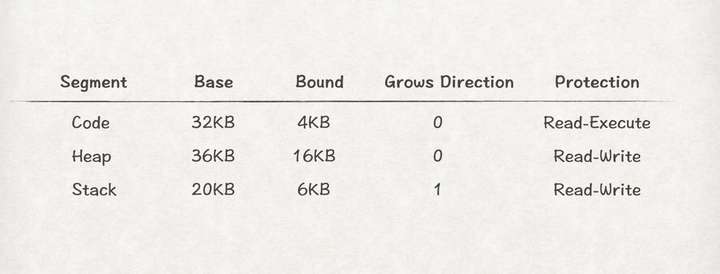
從上圖8可知,段式記憶體管理中程式的物理記憶體空間可能不再連續了,因此為了實現從虛擬地址到物理地址到轉換,MMU需要為每個段都提供一對base-bound暫存器,比如:

給一個虛擬地址,MMU是如何知道該地址屬於哪個段,從而根據對應的base-bound暫存器轉換為對應的物理地址呢?
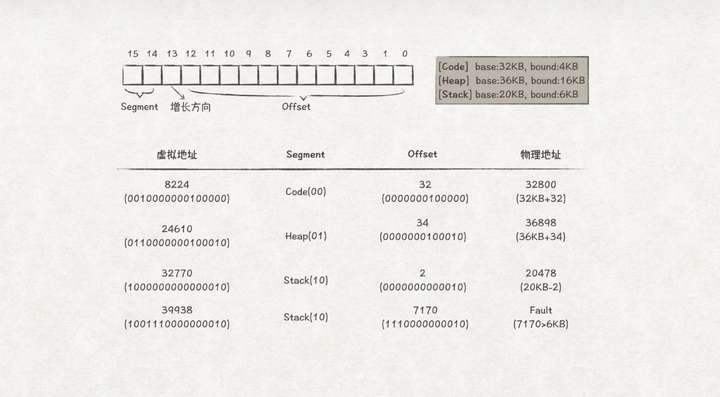
假設虛擬地址有16位,因為只有3個段,因此,我們可以使用虛擬地址的高2位來作為段標識,比如00表示Code段,01表示Heap段,11表示Stack段。這樣MMU就能根據虛擬地址來找到對應段的base-bound暫存器了:

但這樣還不是能夠順利的將虛擬地址轉換為物理地址,我們忽略了重要的一點:Heap段和Stack段的增長方向是相反的,這也意味著兩者的地址轉換方式是不一樣的。因此,我們還必須在虛擬地址中多使用一位來標識段的增長方向,比如0表示向上(低地址方向)增長,1表示向下(高地址方向)增長:

下面,看一組段式記憶體管理地址轉換的例子:
那麼,總結段式記憶體管理的地址轉換演算法如下:
// 獲取當前虛擬地址屬於哪個段 Segment = (VirtualAddress & SEG_MASK) >> SEG_SHIFT // 得到段內偏移量 Offset = VirtualAddress & OFFSET_MASK // 獲得記憶體增長的方向 GrowsDirection = VirtualAddress & GROWS_DIRECTION_MASK // 有效性校驗 if (Offset >= Bounds[Segment]) RaiseException(PROTECTION_FAULT) else if (GrowsDirection == 0) { PhysAddr = Base[Segment] + Offset } else { PhysAddr = Base[Segment] - Offset }
記憶體共享和保護
段式記憶體管理還可以很方便地支援記憶體共享,從而達到節省記憶體的目的。比如,如果存在多個程式都是同一個可執行文件運行起來的,那麼這些程式是可以共享Code段的。為了實現這個功能,我們可以在虛擬地址上設置保護位,當保護位為只讀時,表示該段可以共享。另外,如果程式修改了只讀的段,則轉換地址失敗,因此也可以達到記憶體保護的目的。
記憶體碎片
段式記憶體管理的最明顯的缺點就是容易產生記憶體碎片,這是因為在系統上運行的程式的各個段的大小往往都不是固定的,而且段的分布也不是連續的。當系統的記憶體碎片很多時,記憶體的利用率也會急劇下降,對外表現就是雖然系統看起來還有很多記憶體,卻無法再運行起一個程式。
解決記憶體碎片的方法之一是定時進行碎片整理:
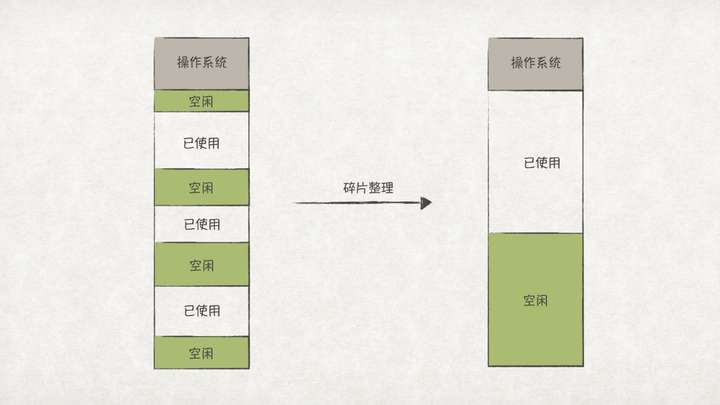
但是碎片整理的代價極大,一方面需要進行多次記憶體拷貝;另一方面,在拷貝過程中,正在運行的程式必須停止,這對於一些以人機交互任務為主的應用程式,將會極大影響用戶體驗。
另一個解決方法就是接下來要介紹的頁式記憶體管理。
頁式記憶體管理
頁式記憶體管理的思路,是將虛擬記憶體和物理記憶體都劃分為多個固定大小的區域,這些區域我們稱之為頁(Page)。頁是記憶體的最小分配單位,一個應用程式的虛擬頁可以存放在任意一個空閑的物理頁中。
物理記憶體中的頁,我們通常稱之為頁幀(Page Frame)

因為頁的大小是固定的,而且作為最小的分配單位,這樣就可以解決段式記憶體管理中記憶體碎片的問題了。
但頁內仍然有可能存在記憶體碎片。
地址轉換
頁式記憶體管理使用頁表(Page Table)來進行虛擬地址到物理地址到轉換,地址轉換的關鍵步驟如下:
1)根據虛擬頁找到對應的物理頁幀
每個虛擬頁都有一個編號,叫做VPN(Virtual Page Number);相應的,每個物理頁幀也有一個編號,叫做PFN(Physical Frame Number)。頁表存儲的就是VPN到PFN的映射關係。
2)找到地址在物理頁幀內的偏移(Offset)
地址在物理頁幀內的偏移與在虛擬頁內的偏移保持一致。
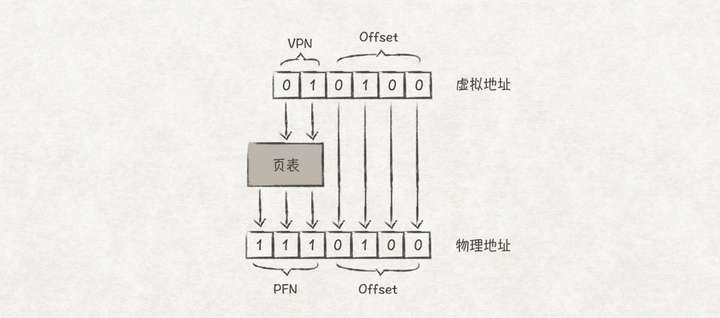
我們可以將虛擬地址劃分成兩部分,分別存儲VPN和Offset,這樣就能通過VPN找到PFN,從而得到PFN+Offset的實際物理地址了。
比如,假設虛擬記憶體空間大小為64Byte(6位地址),頁的大小為16Byte,那麼整個虛擬記憶體空間一共有4個頁。因此我們可以使用高2位來存儲VPN,低4位存儲Offset:

下面看一個轉換例子,VPN(01)通過頁表找到對應的PFN(111),虛擬地址和物理地址的頁內偏移都是0100,那麼虛擬地址010100對應的物理地址就是1110100了。
頁表和頁表項
OS為每個程式都分配了一個頁表,存儲在記憶體當中,頁表裡由多個頁表項(PTE,Page Table Entry)組成。我們可以把頁表看成是一個數組,數組的元素為PTE:
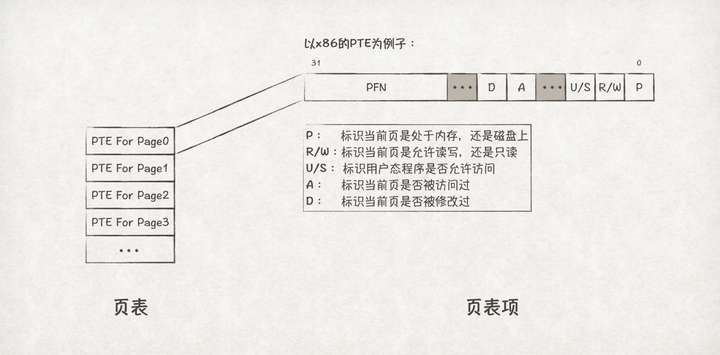
以x86系統下的PTE組成為例,PTE一共佔32位,除了PFN之外,還有一些比較重要的資訊,比如P(Present)標識當前頁是否位於記憶體上(或是磁碟上);R/W(Read/Write)標識當前頁是否允許讀寫(或是只讀);U/S(User/Supervisor)標識當前頁是否允許用戶態訪問;A(Access)標識當前頁是否被訪問過,在判斷當前頁是否為熱點數據、頁換出時特別有用;D(Dirty)標識當前頁是否被修改過。
頁式記憶體管理的缺點
地址轉換效率低
根據前文介紹,我們可以總結頁式記憶體管理機制下地址轉換的演算法如下:
// 從虛擬地址上得到VPN VPN = (VirtualAddress & VPN_MASK) >> SHIFT // 找到VPN對應的PTE的記憶體地址 PTEAddr = PTBR + (VPN * sizeof(PTE)) // 訪問主存,獲取PTE PTE = AccessMemory(PTEAddr) // 有效性校驗 if (PTE.Valid == False) RaiseException(INVALID_ACCESS) else // 獲取頁內偏移量 offset = VirtualAddress & OFFSET_MASK // 計算得出物理地址 PhysAddr = (PTE.PFN << PFN_SHIFT) | offset
我們發現,每次地址轉換都會訪問一次主存來獲取頁表,比段式記憶體管理(無主存訪問)低效很多。
佔用空間大
假設地址空間為32-bit,頁的大小固定為4KB,那麼整個地址空間一共有2^{32}/4KB=2^{20}232/4KB=220個頁表,也即頁表一共有2^{20}220個PTE。現假設每個PTE大小為4-byte,那麼每個頁表佔用4MB的記憶體。如果整個系統中有100個程式在運行,那麼光是頁表就佔用了400MB的記憶體,這同樣是用戶無法接受的。
接下來,我們將介紹如何去優化頁式記憶體管理的這兩個顯著缺點。
讓頁式管理的地址轉換更快
TLB:Translation-Lookaside Buffer
根據前文所述,頁式記憶體管理地址轉換因為多了一次主存訪問,導致效率很低。如果能夠避免或者減少對主存的訪問,那麼就能讓地址轉換更快了。
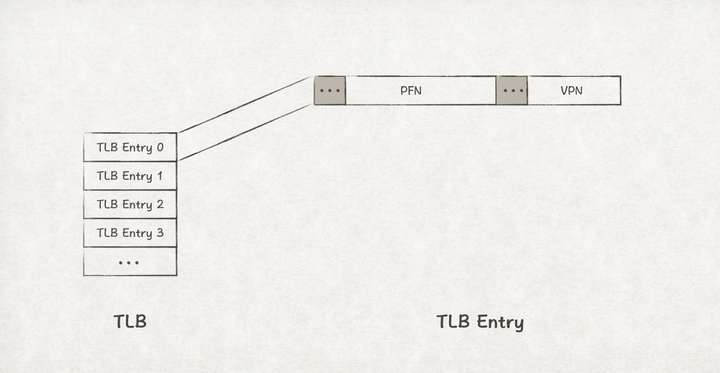
很多人應該都可以想到通過增加快取的方式提升效率,比如為避免頻繁查詢磁碟,我們一般在記憶體中增加一層快取來提升數據訪問效率。那麼為了提升訪問主存中數據的效率,自然應該在離CPU更近的地方增加一層快取。這個離CPU更近的地方,就是前文提到的位於CPU晶片之內的MMU。而這個高速快取,就是TLB(Translation-Lookaside Buffer),它快取了VPN到PFN到映射關係,類似於這樣:
增加TLB之後,地址轉換的演算法如下:
VPN = (VirtualAddress & VPN_MASK) >> SHIFT (Success, TlbEntry) = TLB_Lookup(VPN) if (Success == True) // TLB Hit if (CanAccess(TlbEntry.ProtectBits) == True) Offset = VirtualAddress & OFFSET_MASK PhysAddr = (TlbEntry.PFN << SHIFT) | Offset else RaiseException(PROTECTION_FAULT) else // TLB Miss PTEAddr = PTBR + (VPN * sizeof(PTE)) PTE = AccessMemory(PTEAddr) if (PTE.Valid == False) RaiseException(SEGMENTATION_FAULT) else if (CanAccess(PTE.ProtectBits) == False) RaiseException(PROTECTION_FAULT) else TLB_Insert(VPN, PTE.PFN, PTE.ProtectBits) RetryInstruction()
從上述演算法可以發現,在TLB快取命中(TLB Hit)時,能夠避免直接訪問主存,從而提升了地址轉換的效率;但是在TLB快取不命中(TLB Miss)時,仍然需要訪問一次主存,而且還要往TLB中插入從主存中查詢到的PFN,效率變得更低了。因此,我們必須盡量避免TLB Miss的出現。
更好地利用TLB
下面,我們通過一個數組遍歷的例子來介紹如何更好地利用TLB。
假設我們要進行如下的一次數組遍歷:
int sum = 0; for (i = 0; i < 10; i++) { sum += a[i]; }
數組的記憶體的分布如下:

a[0]~a[2]位於Page 5上,a[3]~a[6]位於Page 6上,a[7]~a[8]位於Page 7上。當我們首先訪問a[0]時,由於Page 5並未在TLB快取里,所以會先出現一次TLB Miss,接下來的a[1]和a[2]都是TLB Hit;同理,訪問a[3]和a[7]時都是TLB Miss,a[4]~a[6]和a[8]~a[9]都是TLB Hit。所以,整個數組遍歷下來,TLB的快取命中情況為:Miss,Hit,Hit,Miss,Hit,Hit,Hit,Miss,Hit,Hit,TLB快取命中率為70%。我們發現,訪問同一頁上的數據TLB的快取更易命中,這就是空間局部性的原理。
接下來,我們再次重新遍歷一次數組,由於經過上一次之後Page 5 ~ Page 7的轉換資訊已經在TLB快取里里,所以第二次遍歷的TLB命中情況為:Hit,Hit,Hit,Hit,Hit,Hit,Hit,Hit,Hit,Hit,TLB快取命中率為100%!這就是時間局部性的原理,短時間內訪問同一記憶體數據也能夠提升TLB快取命中率。
TLB的上下文切換
因為TLB快取的是當前正在運行程式的上下文資訊,當出現程式切換時,TLB裡面的上下文資訊也必須更新,否則地址轉換就會異常。解決方法主要有2種:
- 方法1:每次程式切換都清空TLB快取(Flush TLB),讓程式在運行過程中重新建立快取。
- 方法2:允許TLB快取多個程式的上下文資訊,並通過ASID(address space identifier,地址空間標識符,可以理解為程式的PID)做區分。
方法1實現簡單,但是每次程式切換都需要重新預熱一遍快取,效率較低,主流的做法是採用方法2。
需要注意的是TLB是嵌入到CPU晶片之內的,對於多核系統而言,如果程式在CPU之間來回切換,也是需要重新建立TLB快取!因此,把一個程式綁定在一個固定的核上有助於提升性能。
讓頁表更小
大頁記憶體
降低頁表大小最簡單的方法就是讓頁更大。前文的例子中,地址空間為32-bit,頁的大小為4KB,PTE的大小為4-byte,那麼每個頁表需要4MB的記憶體空間。現在,我們把頁的大小增加到16KB,其他保持不變,那麼每個頁表只需要$2^{32}/16KB=2^{18} $個PTE,也即1MB記憶體,記憶體佔用降低了4倍。
大頁記憶體對TLB的使用也有優化效果,因TLB能夠快取的上下文數量是固定的,當頁的數量更少時,上下文換出的頻率會降低,TLB的快取命中率也就增加了,從而讓地址轉換的效率更高。
段頁式記憶體管理
根據前文所述,程式的地址空間中,堆與棧之間的空間很多時候都是處於未使用狀態。對應到頁表裡,就是有很大一部分的PTE是invalid狀態。但因為頁表要涵蓋整個地址空間的範圍,這部分invalid的PTE只能留在頁表中,從而造成了很大的空間浪費。

前文中,我們通過段式記憶體管理解決了堆與棧之間記憶體空間的浪費問題。對應到頁表中,我們也可以為頁式記憶體管理引入段式管理的方式,也即段頁式記憶體管理,解決頁表空間浪費的問題。
具體的方法是,為程式的地址空間劃分出多個段,比如Code、Heap、Stack等。然後,在每個段內單獨進行頁式管理,也即為每個段引入一個頁表:

從上圖可知,將頁表分段之後,頁表不再需要記錄那些處於空閑狀態的頁的PTE,從而節省了記憶體空間的消耗。
多級頁表
降低頁表大小另一個常見的方法就是多級頁表(Multi-level Page Table),多級頁表的思路也是減少處於空閑狀態的頁的PTE數量,但方法與段頁式記憶體管理不同。如果說段頁式記憶體管理可以看成是將頁表分段,那麼多級頁表則可以看成是將頁表分頁。
具體的做法是將頁表按照一定大小分成多個部分(頁目錄,Page Directory,PD),如果某個頁目錄下所有的頁都是處於空閑狀態,則無須為該頁目錄下的頁申請PTE。
以二級頁表為例,下圖對比了普通頁表和多級頁表的構成差異:

下面,我們再對比一下普通頁表和多級頁表的空間消耗。還是假設地址空間為32-bit,頁的大小為4KB,PTE的大小為4-byte,一共有2^{20}220個頁,那麼普通頁表需要4MB的記憶體空間。現在,我們將2^{20}220個頁切分為2^{10}210份,也即有2^{10}210個頁目錄,每個頁目錄下管理2^{10}210個頁,也即有2^{10}210個PDE(Page Directory Entry)。假設PDE也佔4-byte記憶體,且根據20/80定律假設有80%的頁處於空閑狀態,那麼二級頁表只需要0.804MB!({2^{10}*4}210∗4{+2^{20}*4*(1-80\%)}+220∗4∗(1−80%))
由此可見,多級頁表能夠有效降低頁表的記憶體消耗。多級頁表在實際運用中還是較為常見的,比如Linux系統採用的就是4級頁表的結構。
Swap Sapce: 磁碟交換區
到目前為止,我們都是假設物理記憶體足夠大,可以容納所有程式的虛擬記憶體空間。然而,這往往是不切實際的,以32-bit地址空間為例,一個程式的虛擬記憶體為4G,假設有100個程式,那麼一共需要400G的物理記憶體(忽略共享部分)!另外,程式運行過程中,並不是一直都需要所有的頁,很多時候只需要其中的一小部分。
因此,如果我們可以先把那些暫時用不到的頁先存在磁碟上,等需要用到時再載入到記憶體上,那麼就可以節省很多物理記憶體。磁碟中用來存放這些頁的區域,被稱作Swap Sapce,也即交換區。

在這種機制之下,當程式訪問某一個地址,而這個地址所在的頁又不在記憶體上時,就會觸發缺頁(Page Fault)中斷。就像TLB快取不命中時會帶來額外的開銷一樣,缺頁也會導致記憶體的訪問效率降低。因為在處理缺頁中斷時,OS必須從磁碟交換區上把數據載入到記憶體上;而且當空閑記憶體不足時,OS還必須將記憶體上的某些頁換出到交換區中。這一進一出的磁碟IO訪問也直接導致缺頁發生時,記憶體訪問的效率下降許多。
因此,在空閑記憶體不足時,頁的換出策略顯得極為重要。如果把一個即將要被訪問的頁換出到交換區上,就會帶來本可避免的無謂消耗。頁的換出策略很多,常見的有FIFO(先進先出)、Random(隨機)、LRU(最近最少使用)、LFU(最近最不經常使用)等。在常見的工作負載下,FIFO和Random演算法的效果較差,實際用的不多;LRU和LFU演算法都是建立在歷史記憶體訪問統計的基礎上,因此表現較前兩者好些,實際應用也多一些。目前很多主流的作業系統的頁換出演算法都是在LRU或LFU的基礎上進行優化改進的結果。
最後
本文主要介紹了OS記憶體管理的一些基本原理,從獨佔式記憶體管理,到頁式記憶體管理,這過程中經歷了許多次優化。這其中的每一種優化手段,都朝著如下3個目標前進:
1、透明化(transparency)。記憶體管理的細節對程式不可見,換句話說,程式可以自認為獨佔整個記憶體空間。
2、效率(efficiency )。地址轉換和記憶體訪問的效率要高,不能讓程式運行太慢;空間利用效率也要高,不能佔用太多空閑記憶體。
3、保護(protection)。保證OS自身不受應用程式的影響;應用程式之間也不能相互影響。
當然,目前主流的作業系統(如Linux、MacOS等)的記憶體管理機制要比本文介紹的原理複雜許多,但本質原理依然離不開本文所描述的幾種基礎的記憶體管理原理。
參考
1、Operating Systems: Three Easy Pieces, Remzi H Arpaci-Dusseau / Andrea C Arpaci-Dusseau
2、為什麼 HugePages 可以提升資料庫性能 , 面向信仰編程
3、探索CPU的調度原理, 元閏子的邀請


