我理解的運動控制系統
前言
時間過的真快,轉眼間我參加工作將近十年,當年高考志願選擇自動化專業真的是基於興趣。十年來有過想要轉行的想法,但仔細想想,如果每天做著自己不喜歡的工作,那將也是暗無天日,自動化這一行也確實辛苦,但我至少還有興趣。「我理解的運動控制系統」這篇文章就是想把自己過去十年的相關工作經驗總結下,方便總結下自己學到的相關知識,也希望能給同行們一點點的經驗分享,希望看到這篇文章的人都能或多或少的學到一點知識。哪怕是其中某一句話對你有幫助,我也就非常開心了。但我畢竟理論水平、經驗和實踐都有限,不可避免的會有錯誤和紕漏,希望大家能給我回饋,我將儘可能的完善和修正相關錯誤。
2021/8/28
目錄
1.運動控制系統的組成
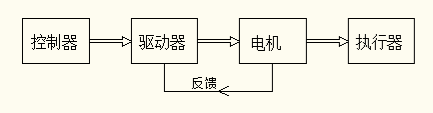
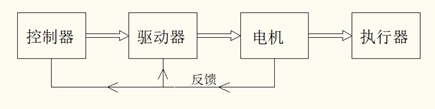
運動控制系統一般由控制器、驅動器、電機、機械執行器、回饋單元組成。根據閉環情況,我們可以分出常見的三種系統框圖。
1.開環系統,即只有驅動和電機是閉環的,驅動和執行器,以及控制器和執行器都沒有閉環。
2.半閉環系統,即控制器到電機是閉環的,控制器與執行器之間開環。
3.閉環系統,從控制器到執行器完全閉環。
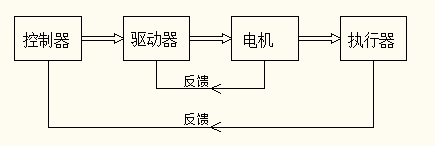
這三種系統類型是非常常見的,開環系統或者半開環系統一般應用於精度要求不高的場合,比如幾個絲的精度要求,控制系統的成本也比較低。閉環系統的成本相對比較高,可以做到的精度也會高很多,現在的直線電機平台做到幾個微米的定位精度都很常見了,好的系統可以做到百納米級,如基因檢測、半導體相關的設備。控制系統類型能滿足要求即可,不必一味追求高精度,合適的才是最好的。
我們想要對運動控制系統有深入的了解,那麼就得了解各部分的詳細知識,接下來我會用較長篇幅對各部分的相關知識詳細介紹。包括控制卡、驅動器、匯流排、電機、回饋等,各部分都有比較詳細的解說。
2.控制卡分類
控制器或者控制卡的性能主要取決於控制演算法,不同廠家控制卡的性能差別可能非常大。目前常見工業應用中比較高端的有以色列ACS,美國Aerotech,這是屬於第一梯隊的,其他國外的流行品牌還有elmo、PMAC、Galil、歐姆龍等。中國的有固高、雷賽、正運動、柏楚等,與國外產品相比仍然有一定差距,但也在不斷突破。
根據控制器傳遞命令給驅動器的方式,可以分為匯流排型、模擬量型、PWM型、脈衝型控制卡。目前,匯流排型控制卡是最主流的,各大廠家的口號都是一網到底,這個網就是指的匯流排,就是通過一根匯流排把所有模組都接上去,確實方便。其他三種類型控制卡也有各自的特色,所以都並行存在於主流市場。
2.1匯流排控制卡
常見的匯流排介面有,EtherCAT、CAN、Modbus、Profinet、EPA、SERCOS-Ⅲ等。匯流排有這麼多種,他們之間是否有聯繫,又有哪些區別呢?這是我們學習匯流排之前需要搞清楚的問題,不然總是會心裡沒底,或者是錯誤的把匯流排混搭一起,這些是新手的必經之路。
要想搞清楚不同匯流排之間的區別與聯繫,我們就得從匯流排通訊的組成或者是框架去看。通訊的概念出現的很早,早期的電話電報就是一種通訊方式,但工業上的通訊應用都是OSI七層模型。OSI(open system interconnect)即開放系統的互連,這個是二十世紀七十年代的產物,當時就是為了解決各系統之間通訊的問題。圖2-1是OSI七層模型圖,從模型中我們可以看到,通訊最終是轉化為比特流發送出去,我們說的通訊速率就是比特流的速率,比如百兆網路100Mbit/s。比特流的傳輸載體是物理層,是我們看的見摸得著的線纜以及介面晶片等。物理層往上是數據鏈路層,數據鏈路層的職責是負責將具體的數據轉化成比特流,然後通過物理層的硬體發送。可以簡單理解為,硬體的編碼與解碼,比如要發送數字8,那麼數字8的比特流高低電平是怎樣的;當收到一串比特流後,應該轉換為哪個數字,這個就靠數據鏈路層完成的,數據鏈路層也是硬體。
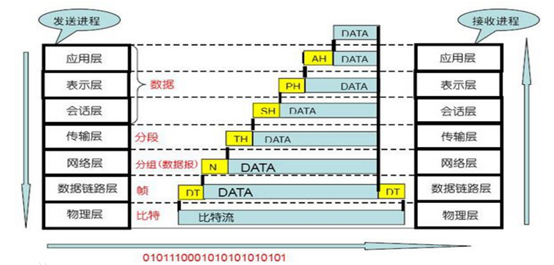
圖2-1 OSI七層模型
數據鏈路層再往上,還有五層。這五層都有一個特點,他們都是軟體層,是運行在處理器上的軟體程式碼,這五層完成數據報的解析,編組,歸類,最終到顯示。當我們用網際網路看影片時,這些層就在周而復始發送請求,解析數據,並最終刷新到顯示介面。這五層搞起來確實有點複雜,有些時候其實是不需要的,比如我們知道數據的具體含義,我們就不需要再去分組整理數量,直接使用即可,工業通訊應用正是符合這個特點。尤其是針對運動控制或者過程式控制制匯流排,層太多不僅沒用,反而會增加成本,並且運動控制或者過程式控制制這種專用匯流排上數據的含義都是嚴格一一對應的,不需各種分組分段解析啥的。所以,將五層壓縮為一層,叫應用層。物理層,數據鏈路層,應用層都有各自的功能,三層功能沒有重疊部分。發送工作流程是當數據到達後應用層後把數據放到對應的存儲區,數據需要發送時到對應區域取出數據,交給數據鏈路層,比特流經物理層發送出去;接收工作流程就是反過來,物理層上的比特流被數據鏈路層解析為正確的數值,放到對應的存儲區域,應用層需要數據的時候取走數據即可。
所以,運動控制或者過程式控制制匯流排,這種專用匯流排都是三層模型,三層模型的功能整理如下表2-1:
表2-1
|
應用層 |
搬運數據,完成控制功能 |
|
數據鏈路層 |
承上啟下,生成比特流,以及解析比特流 |
|
物理層 |
比特流傳輸載體 |
當我們接觸或者學習新的匯流排時,主要是搞清楚匯流排的框架,即這三層的情況是怎樣的。只有搞清楚了這三層,你才不會被各種新鮮名詞所嚇倒,你才不會去隨便混搭匯流排。搞清楚了匯流排通訊模型後,我們看下當前最火的兩個匯流排,EtherCAT和CAN匯流排。
為什麼EtherCAT和CAN匯流排這麼火?
首先,是CAN匯流排起步早,博世公司1986年推出,當時主要是面向汽車行業。注意這裡我說的是CAN匯流排,不是CANOPEN匯流排,CANOPEN只是基於CAN匯流排的應用層協議,汽車行業基於CAN匯流排的應用層協議是J1939。經過汽車行業的多年應用,大家發現這個匯流排的優點很多,速度快,1Mbit在現在看確實不快,但在那個年代還是非常牛的;有COB-ID,有仲裁機制,高優先順序的數據可以先傳輸,低優先順序是數據後發送,排隊的數據在匯流排空閑的時候會自動發送,無需人為干預;差分傳輸,數據傳輸可靠性高;理論上可以在匯流排上掛任意多節點;成本低,幾塊錢的MCU就自帶CAN控制器,現在一般同時支援CAN2.0A和2.0B。
既然CAN匯流排有這麼多優點,那就得充分利用上,緊接著有個組織叫CIA(CAN in Automation)起草了基於CANopen的設備及通訊子協議定義DS 301(Draft Standard 301),也就是我們經常說的301協定。DS301只是CANopen的一個基礎規範,具體到細分領域有,I/O模組的DS401,運動控制的DS402。講到這裡就出現了我們期盼已久的CANopen協議,之所以火就是因為起步早,又趕上了電機運動控制的蓬勃發展時期,靠譜好用,便宜,易上手。其實基於CAN匯流排的應用層協議還有北美船舶行業通訊協議,廣州周立功公司的iCAN,但這個兩個協議都不在運動控制系統中出現。其實協議就是這麼簡單,你也可以基於CAN匯流排創立自己的協議,只要有人用,你就很了不起。
這裡簡單講下CANopen DS402的相關知識,方便我們後面的理解。DS402裡面有一些概念,對象字典,Node-ID,COB-ID,SDO,PDO,NMT,Heartbeat,狀態機,Master,Slave,我們都簡單介紹下。DS402中規定網路中各設備是主從關係,即Master-Slave模式,原則上只能有一個Master,負責整個網路的管理。其實CAN匯流排上的都是節點,沒有主從的概念,主從的概念是在DS402中規定的,這一點我們要清楚。對象字典我們可以理解為暫存器表,只不過DS402已經規定了這個暫存器表的組織結構,包括一部分地址必須給協議使用,如0x6040,0x6041這些都是規定好的。有了對象字典我們就知道每個對象代表的是什麼意思,每個廠家都按這個去設計。傳輸數據的時候我們得知道這個是哪個從站設備的數據,就需要有個Node-ID,簡單說就是設備的編號。假如不同設備同時要傳輸同樣對象字典的數據,那我們該怎樣區分呢?這個時候就有COB-ID,COB-ID是對應的編碼加上Node-ID,如0x600表示SDO讀,對應節點1組合後的COB-ID就是0x600+0x01=0x601,節點2則為0x602,以此類推。這樣我們就可以通過COB-ID來直接操作數據了,而無需關心是哪個節點的,如果數據同時需要發送,那麼匯流排的仲裁機制就會起作用,COB-ID越小的優先順序越高,優先發送,等待的數據在前面的數據發送完之後會自動重發。
數據的傳輸分為兩種,一種是SDO,就是有問才有答,查詢一次回復一次,類似服務生一樣。另一種是PDO,叫過程數據,提前配置好了數據的傳輸方式後數據就會自動上傳,如可以設置數據的最小間隔時間,同步、非同步、RTR等。SDO和PDO都是為了傳輸數據,但PDO傳輸的是過程數據,更精簡,傳輸數據的效率會更高,如循環同步模式肯定是PDO傳輸數據。NMT是網路管理的意思,主站負責管理整個網路,如各節點的狀態切換等。狀態機是控制節點切換的,如在非使能狀態到使能狀態應該怎麼響應,這個是狀態機管理的。最後一個是Hearbeat,當然也有NodeGuarding,這兩個都是回饋節點的狀態。當匯流排在工作的時候我們得知道節點是否還在線,Hearbeat就類似我們的心跳,間隔多長時間必須收到一次心跳,超出設定時間沒收到心跳則表示該節點已死亡。NodeGuarding是另外一種監測方式,它有主站和從站的互動,這是不同於Hearbeat的,就是主站要發命令給從站,從站也要回應命令,也是要求在規定的時間內,目前Hearbeat用的更多一些。CANopen DS402就簡單介紹這麼多,感興趣的可以看下相關手冊,結合一個產品測試下就能理解的透徹了。
最後,講講更高大上的EtherCAT匯流排,前面的鋪墊都是為了這裡的講解,EthterCAT的字面意思就是乙太網自動化控制技術。簡單點說就是基於乙太網,完成自動化控制功能,但肯定與普通乙太網還是有區別的。他們的傳輸介質是一樣的,都是RJ45網口+網線,但EtherCAT網路的數據鏈路層晶片是專門設計的,其目的是為了提高匯流排的性能。比如,增加了DC同步單元,數據自動轉發,還有FMMU單元,SM單元,詳細的情況可以去查詢相關資料。DC同步單元的時鐘都是ns為單位,可以滿足非常高的同步要求,然後乙太網的通訊速度又非常快,現在1000Mbit/s都已經不是事了,在每個傳輸周期可以有非常大量的數據交互。這些都是基於硬體的,做應用的人可以不用關心,我們還是講講上層協議。對硬體感興趣的可以參考AX58100、ET1100晶片的數據手冊,山東大學李正軍教授的《EtherCAT工業乙太網應用技術》非常不錯,裡面有詳細的介紹,值得一看,這裡就不展開講了。基於EtherCAT匯流排的應用層協議有FoE、CoE、SoE、EoE、AoE、VoE,各個協議的具體描述如下表2-2:
表2-2
|
FoE |
File over EtherCAT |
在EtherCAT匯流排上傳輸文件的協議 |
|
CoE |
CANopen over EtherCAT |
在EtherCAT匯流排上執行CANopen協議 |
|
SoE |
SERCOS over EtherCAT |
在EtherCAT匯流排上執行SERCOS協議 |
|
EoE |
Ethernet over EtherCAT |
在EtherCAT匯流排上執行Ethernet協議 |
|
AoE |
|
訪問底層現場匯流排的從站設備的對象字典,如對連接到EtherCAT-CAN網關設備的CAN從站 |
|
VoE |
|
供應商自定義協議,基於郵箱 |
這些都是運行在EhterCAT匯流排基礎上的應用層協議,各個協議分管與自己相關的工作。我們現在常用的EtherCAT伺服驅動器,說白了就是把CANopen應用層協議搬到了EtherCAT匯流排之上。由於EhterCAT匯流排的高傳輸速度,所以這個時候可以有更高的控制訊號頻率,就會有更好的控制效果。講到這裡,我們可以發現,同樣的協議可以在不同的匯流排上,同樣的匯流排也可以用不同的協議。所以,當我們討論匯流排的時候也要討論匯流排的應用層協議,即我們前文提到的三層模型,只有三層模型都一樣的系統才能完美對接。對匯流排就介紹這麼多,原理都是一樣的,其他匯流排可以按照這個方法學習,事半功倍。
有了這樣可靠性高,同步性好,控制頻率可以很高的匯流排,現在控制指令的頻率到8Khz已經不是問題了。控制卡的指令就可以很快很準的發送給匯流排上的驅動單元,最終達到好的控制效果。匯流排型控制系統的所有指令,位置回饋,指示狀態,錯誤程式碼等等,都是由通訊來完成交互的,這一點和傳統的控制方式有很大的區別。
2.2模擬量控制卡
模擬量控制卡就是控制指令是通過模擬訊號發送出去的,這個模擬訊號有電壓範圍,常見的模擬量控制訊號規格有±10V,±5V,0-5V等。根據模擬訊號的規格,提前設置好驅動器的相關參數,當模擬指令被接收後,驅動器就會執行相關指令。
如果驅動器是工作在電流環,則模擬量電壓對應驅動器輸出的電流,模擬量電壓和輸出電流之間是線性關係。如果驅動是工作在速度環,則模擬量電壓對應電機的轉速,兩者之間也是線性關係。也有的驅動器在位置模式的時候支援模擬量輸入,這個時候模擬量對應的是位置,也是線性變化的,如0V對應位置0,10V對應位置10,-10對應位置-10。
相比於匯流排控制方式,模擬量控制是無法實時獲取驅動器內部變數的,如讀取驅動器輸出電流數據、報錯程式碼等都是實現不了的,需要通過驅動器的通訊介面才可讀取到,一般也就是接一個驅動的報錯狀態接到控制卡。模擬量也可以有很高的控制頻率,幾Khz的控制頻率就是小菜一碟,前提是要驅動器伺服環路的頻率也得足夠快。目前模擬量控制方式還是非常流行,可以有很不錯的控制效果。相比於匯流排控制卡,布線相對比較複雜,控制訊號還有干擾問題,一般適用是規模比較小的一體式設備。
2.3PWM&脈衝控制卡
有的控制卡輸出控制訊號是PWM,PWM控制方式可以實現類似模擬量的控制功能,PWM的優點是實現方便,對於所有的MCU都可以實現這個功能,並且電路簡單。模擬量電路實現起來就要複雜的多,更需要處理好乾擾問題。
脈衝控制方式是最簡單的控制方式,驅動是工作在位置模式。提前設置好脈衝數量和位置的對應關係,當收到脈衝後就開始執行位置規劃。脈衝的控制方式非常經濟,對要求不高的應用足以應付。PWM和脈衝控制方式都很簡單,這裡就一筆帶過了。
3.驅動器分類
驅動器按供電可分為交流供電和直流供電,按功率可分為小功率、中功率和大功率。對於高精密運動控制系統,通常使用的是中小功率的交流和直流伺服驅動器。按控制訊號接收方式,也可以分為匯流排介面、模擬量介面、PWM介面、脈衝介面。按驅動器能驅動的電機類型,可以分為直流有刷、直流無刷、以及有刷無刷都能驅動的驅動器。
3.1驅動器組成
硬體組成:一般驅動器的主控制器為MCU或者DSP。MCU和DSP之間的區別是,MCU是通用性更強,價格便宜,外設豐富,運算能力稍弱的控制單元;DSP和MCU本質上沒有太大區別,但相比於MCU,DSP的主要特點是做運算,高端驅動器的主控制器一般都是DSP,當然價格也更貴。驅動器的硬體組成如圖3-1所示,主控制器連接著各種各樣的外圍電路,感測器介面電路,如:霍爾感測器、數字增量編碼器、絕對值編碼器、正餘弦編碼器等。數字/模擬輸入輸出電路,包括通用數字輸入輸出、剎車、使能、報錯,通用模擬量輸入輸出。功率放大驅動電路,上接主控制器,根據收到的指令訊號,控制功率MOS管開關來控制電機。通訊介面電路,負責將通訊線上的電平訊號轉換為主控制器可以接收和識別的訊號,如CAN匯流排晶片TJA1050,EtherCAT晶片ET1100/AX58100,RS232晶片MAX232,USB轉換晶片CH330/CH340。訊號採集電路,電流採集可以知道繞組當中的電流,溫度採集等。其他電路,包括狀態指示,電源穩壓,過壓過流保護等。最後,就是電源模組,負責供電給驅動器的各個功能單元供電。
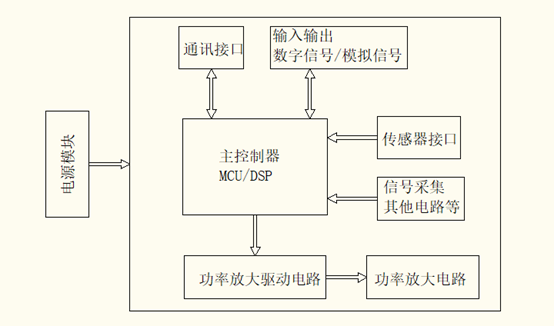
圖3-1
韌體組成:韌體的組成如圖3-2所示,如果硬體是驅動器的軀體,那麼韌體就是驅動器的靈魂。驅動的韌體,就是運行在驅動上的微型作業系統。這個系統主要有主程式、通訊協議棧程式、工作模式程式、伺服演算法程式構成,其中主程式負責整個系統的調度,是一直死循環工作的,根據需要去執行相應部分的程式碼。
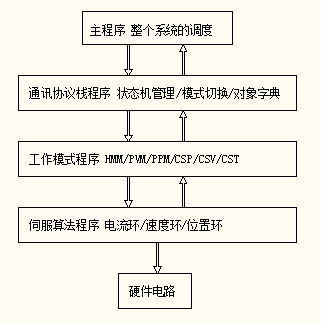
圖3-2
伺服演算法是整個驅動器靈魂中的靈魂,是決定一個驅動器性能非常重要的一個部分,同時硬體性能也非常重要。但硬體可以看的見摸得著,演算法確看不見摸不著,需要一個團隊長達幾年甚至幾十年的耕耘,目前國外驅動器比中國好的主要就是演算法先進。伺服演算法分為三環,電流環、速度環、位置環,電流環是基礎,同時也是最難的一個環路,接下來我們就從電流環開始。
3.2電流環
在講電流環之前,首先說下PWM脈衝寬度調製電路,供給驅動器的直流電源不是直接到電機,會經過一個調製電路,輸出以一個固定頻率開關開關的脈衝電源,這個開關的頻率就是PWM頻率,如圖3-3所示。電流環根據指令調節電壓的占空比,高電平時間越長,則輸出電壓越高,低電平時間越長,則輸出電壓越低。在這裡我們看見電壓是不連續的,但由於這個頻率足夠快,現在驅動器的PWM頻率一般從20Khz-100Khz,這個切換的頻率足夠快,快到你感覺電壓就是連續的,比如你用萬用表測量的時候發現電壓是幾乎不變的。這是由於電機中的電感存在,電感中的電流不能突變,即使在低電平期間,電壓也不為零。
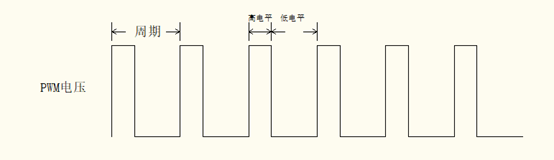
圖3-3
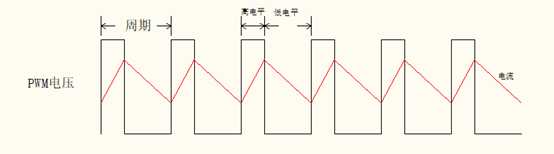
圖3-4
電機繞組當中的電流如圖3-4所示,微觀來看電流是在不斷的增加和減少,確實存在波動。但從宏觀來看,電流基本上是一個常數。我們以50Khz的PWM為例,則周期T=20us,假設電機電感100uH,電阻1.5Ω,這個很常見。則電氣時間常數 τ = L/R = 100*10-3/1.5 = 66.6us,可以看到最短的電流切換時間為66.6us。選取的這個參數還是maxon高速空心杯電機的參數,實際上一般電機的電感遠遠大於這個,一般都會到mH級別,電氣時間常數遠遠超過百微妙級,所以電機繞組當中的電流是連續的。如果真有電機的電感非常小,比如到了幾個uH級別,那麼這個電機的控制將會非常難,因為電感很小,在高電平期間電流會瞬間增加到一個非常大的值,這個時候要麼是驅動報短路,要麼是電機已經起飛了。所以,超低電感量的電機不是一個好玩的東西,有時候不得不外部增加電感來抑制電流的瞬時突變,這樣才能較好的控制電機。
當然,理論上我們可以用更高的PWM頻率來對付低電感量的電機,比如1Mhz的PWM頻率,這樣控制也不會是問題。這個就有點你很快,我則比你更快的意思,有點以暴制暴的感覺,可惜目前的電子器件還到不了這個水平。從這個現象我們可以想一下,如果驅動器的PWM頻率加倍會有什麼結果?結果如圖3-5所示,電流的紋波會變小,因為PWM的頻率快了,電流增加和減少的時間就更短。如果是PWM頻率減一半,則電流的紋波會更大,這個應該比較好理解。如果理解不了的話,我舉一個極端點的例子,假如PWM頻率就0.5Hz,開1秒關1秒,這個時候電機的運轉都不連續了,這個電流紋波夠大了吧,都已經一會兒有一會兒沒有了。
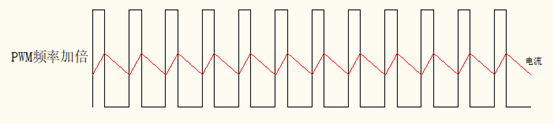
圖3-5
其實PWM頻率對電機控制還有其他的影響,主要有兩方面。第一,電流紋波越大,電機的發熱就越厲害,繞組就是銅線,銅線是有電阻的,更多的電流就會產生更多的熱。所以,這也就是我們經常看見或者聽說的,僅僅是使能沒有驅動負載,電機都很熱的主要原因之一。同時,如果想要有更小的發熱,就得提高PWM的頻率,或者外部增加電感來抑制電流紋波。第二,電流對應的是電機的輸出轉矩,電流的波動也就代表著電機輸出轉矩的波動,所以更小的電流紋波對輸出平穩性也很有好處。
電流環的功能遠遠不是調節PWM占空比這麼簡單,還有更重要的任務等著它。我們知道電機分為有刷電機和無刷電機,有刷電機是靠機械換向片來換向,無刷電機的換向就得靠電子電路來完成了,一般稱為電子換向。那電子換向做一件什麼事情呢?就是要達到和機械換向一樣的效果,讓電機能連續運轉。機械換向是通過換向片來切換繞組的通電電壓的方向,電子換向就是用電子電路來切換繞組的通電順序,這就是無刷電機換相。目前無刷電機的換向方法有,方波換向,正弦換向,FOC磁場矢量定向控制,無感換向。除了無感換向外,其餘三個換向方式都需要感測器回饋轉子的實時位置,在正確的時間換向才能讓電機輸出最大的轉矩,並且發熱最小。
方波換向,方波換向的轉子位置回饋是霍爾感測器,霍爾感測器是由霍爾效應發展而來的,當N極磁場和S極磁場經過霍爾感測器時,霍爾感測器的狀態會發生變化。利用這個特性,我們就可以知道轉子位置的變化。霍爾感測器總共有三個,分別對應三個繞組,通過三個霍爾感測器的狀態,我們就知道了三相繞組的通電順序,從而完成了換向工作。只要電機一直在旋轉,那麼就一直在換向,其實有刷電機也是一樣,只不過是機械換向片完成的。
我們以一極對無刷電機霍爾訊號的變化過程來說明,如圖3-6所示,每個霍爾感測器有在一個周期有一半時間是高電平另一半時間是低電平。這三個訊號組合起來就有6種狀態,所以方波換向或者霍爾換向又叫六步換向。這三個霍爾感測器的狀態可以被電路直接讀取,去控制功率放大電路MOS管的導通和關閉。如果是多極對無刷電機,霍爾感測器變化一個周期的距離就會變短。
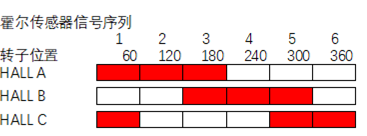
圖3-6
方波換向電機中的電流如圖3-7所示,因為換向電壓是方波的,所以繞組中的電流也是方波,這樣轉矩輸出就會有波動。

圖3-7
正弦換向,正弦換向就是模擬正弦波形,這樣繞組中的電流也是連續的,輸出轉矩的波動相比方波換向會小。正弦換向靠的是演算法去模擬正弦波形,運算量很大,同時也需要高解析度的感測器來回饋轉子的位置,如果500線以上的編碼器,解析度越高會越精細。正弦換向電機中的電流如圖3-8所示,三相電流是交替變化的,各相差120°電角度。
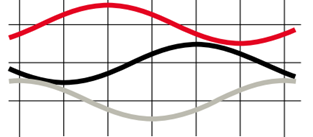
圖3-8
FOC磁場矢量定向控制換向,可以認為是正弦換向的升級版。相比正弦波換向方式可以讓定子磁場和轉子磁場時刻保持正交關係,獲得最大的輸出轉矩,同時效率也高。目前市面上大多數驅動器都是FOC換向方式,也是直流無刷電機的最佳換向選擇。
總結三種有感換向方式的優缺點,方波換向簡單,可以有更高的轉速。因為方波換向次數相比正弦換向和FOC要少,正弦換向和FOC其實可以理解為一直在換向,最終電子器件的響應速度和處理器的運算能力會限制這個換向的最高頻率,也就限制了最高轉速。但方波換向相比FOC和正弦換向會有更大轉矩波動,電流是階梯變化,也就會有更大的雜訊。所以,方波換向一般適用是高轉速的應用。正弦換向和FOC換向的缺點是演算法複雜,硬體成本高,不適合高速和超高速應用。但可以有更小的轉矩波動,更小的雜訊,適合中低速應用。我們可以根據不同的應用需求,去選擇合適的換向方式。
無感換向,無感指的是沒有感測器回饋轉子的位置,又需要給無刷電機換向。現在無感換向主要是通過測量繞組的反電動勢和檢測轉子轉動時候磁場變化兩種方式,檢測磁場變化的換向方式比檢測反電動勢的換向方式更好。如果是檢測反電動勢的換向方式,當電機轉速很低甚至是停止的時候,反電動勢很弱,不能準確的檢測過零點,所以檢測反電動勢的無感換向一般只適用於轉速比較高的應用,如最低轉速在1000rpm。檢測磁場的無感換向方式應用範圍要廣的多,可以適應更低的轉速,如100rpm,但難度也更大,需要調試和適配的參數很多。無感換向方式一般都是特殊應用,如高速手動工具,優點是不需要感測器,接線也少。
講完換向方式,電流環的介紹就基本結束了。最後看下電流環的一個指標,電流環取樣頻率,通過功率放大電路輸出的電流都要通過取樣電路採集回來形成閉環,大了就減小,小了就加大。這個取樣頻率就是一秒時間我去採集多少次,採集完了再運算,根據運算結果調整輸出。目前市面上的驅動器,電流環取樣頻率一般在2-100Khz,更高的取樣頻率就需要有更好的處理器,當然也就會有更好的控制效果。取樣也涉及到取樣演算法,高頻率的取樣怎樣處理取樣結果,應該怎樣濾波處理,都是可以深挖很久的。
講到這裡,電流環的主要框架就講完了,電流環的硬體和軟體都是很複雜的,也是伺服環路裡面最難的一個。尤其是演算法,國產品牌還有很大進步空間,需要持續耕耘,但可以肯定的是,國產替代是以後的大方向。
3.3速度環
電流環的一系列操作的最終效果是保證電機有連續的輸出轉矩,雖然可以通過電流控制電機輸出的力,但無法控制電機的轉速和位置。速度環的功能就是調節電機的轉速,但是速度環不是直接控制電機,而是將指令下發給電流環,由電流環最終通過調節電機電流,來達到調節轉速的效果。兩個環路之間的連接框圖如下圖3-9所示

圖3-9
這個只是理論框圖,實際上比這個複雜,速度回饋一般都會有濾波器,儘可能減小速度波動對採集的影響。速度環的回饋主要是基於電機編碼器,編碼器的解析度越高,對速度採集的準確度就越有幫助。目前市面上主流驅動器的速度環取樣頻率,大概在1-20Khz之間,如此高的取樣頻率,如果編碼器解析度比較低,假如500線,一個取樣周期多一個或者少一個脈衝,最終算下來的偏差都會到百分之幾。這個是不利於速度穩定性的,對於速度穩定性要求高的應用,編碼器解析度應儘可能高,但又不能超過編碼器介面的接收頻率範圍。同樣,速度環的取樣頻率越高,可以調整的次數就越多,效果也就會越好。
除此之外,速度環還有前饋,包括速度前饋和加速度前饋。前饋的意思就是提前饋贈給你,即不經過速度環運算提前給到電流環,前饋是為了加快響應,抑制系統機械部分非線性的擾動。尤其是加速度前饋,對抑制整個過程的跟隨誤差非常有效。前饋與系統的關係如圖3-10所示:
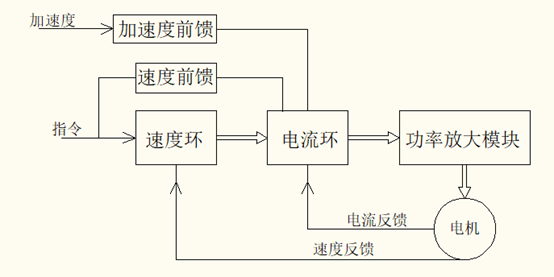
圖3-10
我們知道系統的機械部分一般都是非線性的,非線性就會對控制造成影響,導致總是會存在跟隨誤差和速度波動。其實基於現代控制理論,我們可以儘可能的減小這個非線性的影響,這個就是非線性控制,我了解到的ACS控制非線性演算法經過多次學習後可以到達很好的控制效果,很小的跟隨誤差以及很小的速度波動。
電流環是一個驅動器好的基礎,速度環則是錦上添花。速度環對系統性能的影響遠遠不是調節速度而已,他直接決定了系統的響應速度,整定時間,共振抑制,擾動抑制等。這一點在我調試過的ACS控制器表現的淋漓盡致,相比之下,位置環對效果的影響小很多。
3.4位置環
位置環是三個環路中最不重要的一個環路,也是最簡單的一個環路,位置環一般是在電流環和速度環之上。具體有兩種連接方式,一種是位置環下接速度環,速度環下接電流環。還有一種是位置環直接到電流環,兩種組成的如圖3-11和圖3-12所示:
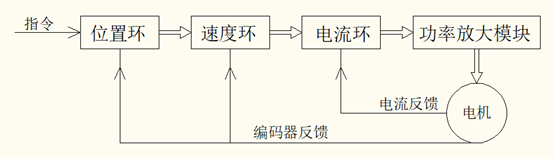
圖3-11
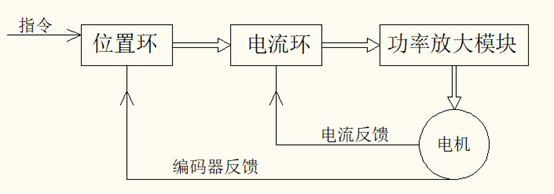
圖3-12
這是兩種不同的實現方式,理論上直接到電流環的響應速度會更快,直接到電流環的方式需要在位置環多加幾個調試參數,如:位置環的速度和加速度前饋。這兩種就是實現方式不一樣,最終不會對控制效果有本質的影響,只是不同廠家的設計理念不一樣。驅動器的三環基本就講完了,通過篇幅長短都可以知道哪個最重要,哪個最難。接下來講講驅動器常用的一些模式,傳統的轉矩、速度、位置三個模式還比較簡單,基於匯流排的一些模式是比較複雜的,也是要重點介紹的。
3.5驅動支援的各種模式詳解
早期非匯流排的驅動器一般是支援三個工作模式,位置模式,速度模式和電流模式,這個都比較簡單,配置好模式,給對應的指令即可工作。這些模式一般都可以接收模擬量和PWM命令,位置模式還可以接收脈衝命令,這個就不展開講了,參對應驅動的手冊即可知道特定模式支援哪些類型的命令輸入。這種驅動最大的缺點就是接線複雜,控制卡離驅動不能太遠,還需要考慮控制線纜抗干擾,不利於分散式現場的情況。這種一般是應用於小型獨立式設備,設備相對比較小,線纜不會太長,干擾問題比較好解決。
隨著匯流排型驅動器的出現,驅動器的工作模式增加了好幾個。沒有特殊說明的話,這裡的匯流排指的是CAN匯流排和EtherCAT匯流排。基於這兩個匯流排的驅動器一般都支援如表3-1所示的模式,當然還有PVT模式,IPM模式,但這些現在已經都不太常見了,有需要的可以查閱相關資料。
表3-1
|
模式縮寫 |
模式描述 |
|
HM |
回零模式 |
|
PVM |
帶規劃的速度模式 |
|
PPM |
帶規劃的位置模式 |
|
CSP |
循環同步的位置模式 |
|
CSV |
循環同步的速度模式 |
|
CST |
循環同步的轉矩模式 |
HM模式是回零模式,驅動器已經內置好了各種回零方式。如先找負限位再找index方式;用限位作為回零原點方式;碰到硬限位回零方式等等。這些回零方式的程式已經在驅動器內部實現好了,我們只需要配置好相關參數,啟動回零即可,回零過程都是驅動器內部程式完成。同時,也有狀態變數可以監控當前的回零狀態,是否完成,是否有報錯等。
PVM和PPM是帶規劃的速度和位置模式,規劃的意思就是根據用戶設定的加減速度去啟動和停止運動。這個兩個模式很簡單,有點像非匯流排伺服驅動器的速度模式和位置模式,這裡不詳細介紹了。
我們重點介紹下循環同步模式,循環同步的意思就是以一個固定的時間間隔,周而復始的發送數據和同步指令。為什麼要搞這個玩法呢?PVM PPM不香嗎?這是我們學習新知識前需要考慮的問題,搞清楚了背景,理解起來會更有幫助。
我們先想下,控制卡+非匯流排伺服驅動器是怎樣實現多軸同步的,是多個驅動的控制命令在同一個DSP中運算,這樣時間上就不會有偏差,確保每次都是幾乎同一時間把指令發送給驅動器。如果是多個DSP有各自控制的驅動器,這些驅動器之間做同步運動,比如插補,效果都會差於一個DSP內部軸同步的效果,除非你把多個DSP任一時刻都同步起來,同樣的時間做同樣的運算,這樣也許會是一樣的效果。而我們這裡說的循環同步就是干這個事情,匯流排型驅動器與控制卡或者叫master之間的連接只有一條通訊線,無論這條通訊線是CAN匯流排的半雙工,或是EtherCAT匯流排的全雙工,再加100Mbit/s的頻寬,數據傳輸總會有先後順序,這個事實沒法改變。假如匯流排上的所有驅動器都以收到指令數據的那一刻去執行指令,那麼驅動器之間就無法很好同步了。那麼應該怎麼辦呢?人是真的聰明,總會想辦法去解決問題,天才的工程師提出了一個解決方案。所有驅動器都先收指令數據,但不要立馬執行,等待一個命令再執行,這個就是同步命令,這樣就完美的解決了匯流排上數據傳輸有先後順序的問題。大家都是先把數據準備好,然後等待同步命令,這個就好比百米賽跑一樣,大家都先準備好,等待發令槍再跑,這樣就是公平的。至於最終跑的結果怎樣看個人水平,驅動器最終執行的效果怎樣也是看驅動器的性能,感覺這個啟發真是源於生活,最終又服務於生活。
講完什麼是循環同步後,我們看下循環同步的三個模式到底是啥。首先說CSP,循環同步的位置模式,這個模式接收的是控制卡下發的位置指令,但這個位置不是隨便發的,需要根據位置軌跡解算為一個一個點,這個是需要上位機解算的。上位解算點的這個過程叫粗插,就是粗線條的給出一些點,這些點不是驅動伺服環路能直接使用的,驅動器在接收到這些點後需要再進行精插,最終變成伺服環路能直接執行的位置點。精插是相對於粗插來說的,精插是以伺服周期為基準時間單位,精細的將軌跡分成很多個位置點,形成一個位置表,每個伺服周期去這個表中取一個值執行即可。我們以一個T形加減速,有勻速過程的點到點運動為例來剖析CSP模式的細節。如圖3-15,是一個點到點運動,位置—時間和速度—時間關係圖,加速和減速階段的軌跡是曲線,勻速階段是直線。再看下位置圖中的插值點,這些點之間的時間是均勻間隔的,每到一個時間點位置軌跡與時間軸圍成一個面積,這個面積就是我們在CSP模式發送給驅動器的位置指令,隨著時間的增加,這個面積會越來越大。
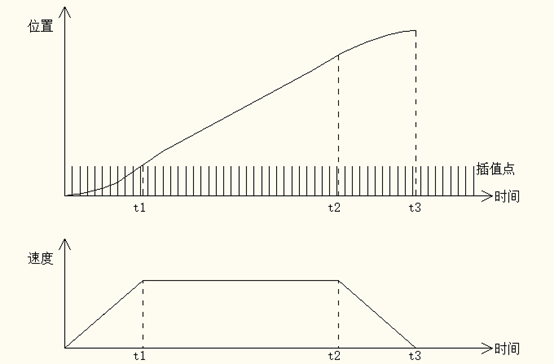
圖3-15
只要這些插值點是均勻的,指令發送的時間是準確的,滿足這兩個條件的情況下,電機的轉動必然是平滑的。這兩個條件中的任何一個不滿足,電機的轉動都是會頓挫的。如果插值點不均勻,比如有的時候插值點是間隔10ms,有的時候插值點是20ms。最明顯的結果就是電機運動不平滑,那麼為什麼會不平滑呢?我們知道位置軌跡連續則位置軌跡的導數或者叫曲線的曲率才不會有突變,位置軌跡導數對應著的是速度,速度不突變則電機運轉平穩。如果我的插值點時間突然增加或者縮短,則必然會導致曲率突變,這是上位在解算軌跡點需要注意的問題。尤其是任意軌跡曲線,曲率的突變非常厲害,即使在均勻的插值情況下,電機運轉可能都會抖動明顯。所以,對任意曲線的插值,還有需要針對銳角以及曲率突變的點做優化,比如用圓弧過度銳角,或者降低運動速度。
到這裡我們對CSP的整個細節基本講完了,在使用過程中,我們還需注意循環同步指令的周期以及指令到達是否準時。指令的周期不應過短,要讓驅動器有精插的空間,比如驅動伺服環路400us,那麼你就不要給低於400us的同步周期,當然很多驅動也不支援這麼短的同步周期,即使支援也不要這樣給。同步指令要有硬時性,或者實時性好,我們一般以us為單位,儘可能的準時,指令不準時同樣會導致電機運動的時候頓挫嚴重,甚至驅動器報錯。下面我們對比下,指令準時和指令不準時的位置軌跡和速度軌跡。
圖3-16左側是指令實時性不好,也就是同步的時間不準,雖然最終的目標位置是一樣,但是過程不一樣。指令的早到或者遲到都會影響位置軌跡,在指令不準時的地方會引起速度的跳變,從而會導致電機運轉不平滑。
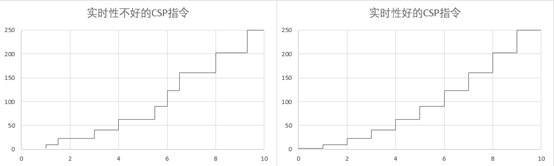
圖3-16
從圖3-17我們可以看到指令實時性好的位置軌跡很平滑,但指令實時性不好的位置軌跡則有點折線的感覺,因為上位解算好的運動點是需要在固定時間執行完才會是平滑的。如果實時性不好,則相同的時間需要移動更多的位置或者更少的位置,從而導致電機需要突然加速或者減速。我們再看圖3-18,指令實時性好的的速度軌跡也是很平滑的,速度沒有跳變,是勻加速過程;反觀指令實時性不好的速度軌跡,速度存在明顯的波動,速度波動會導致電機頓挫。

圖3-17
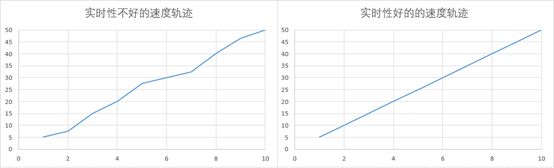
圖3-18
到這裡我們講完了整個CSP模式的要點,在使用CSP模式的時候如果電機運轉不平滑,該怎樣去找問題,這才是我們要關注的核心。看到這裡應該有一種豁然開朗的感覺,就證明你完全理解了循環同步位置模式的精髓。
講完CSP模式,後面的CSV和CST模式就簡單了,我們先看看CSV模式。CSV是循環同步的速度模式,控制卡下發的是速度指令,這個速度指令和位置指令一樣,也不是隨便給的。需要對速度曲線進行插值,解算每個周期應該給驅動的速度指令,對位置軌跡求導數就是速度,也就有了速度曲線。同CSP一樣,控制卡或者上位也只是粗插,伺服環路還會根據指令和周期的時間進行精插,最終就變成了伺服環路可以執行的指令。同樣,CSV模式對指令的實時性要求同CSP一樣,不準時的指令就會導致電機運轉的時候頓挫,頓挫就是速度突變造成的,分析方法和CSP模式一樣,這裡不再贅述。
看完CSV,我們再看看CST,這個模式和前面兩個的共同之處是都為循環同步模式,不同之處是CST模式的指令直接被伺服環路所用,中間沒有精插的過程。由於這個不同,CST模式的指令實時性不好的時候我們也很難發現,因為CST模式對應的是電機的電流,電流對應的是電機的輸出轉矩,電流的突變就是轉矩的突變。轉矩的是突變對應三種情況,一種是電機輸出轉矩大於負載轉矩,電機加速;另一種是電機輸出轉矩等於負載轉矩,電機還是靜止;甚至是電機輸出轉矩小於負載轉矩,電機被負載拖動,運動控制中這種一般很少。指令實時性不好很難被發現,並不是說CST模式對指令實時性沒有要求,既然叫循環同步模式,那就是有這個要求。
總結下三個循環同步模式,循環同步模式的出現,使得我們對任意軌跡的指令規劃變得非常方便,就是對曲線插值,獲得各時刻應該下發的指令。它使我們更加靠近了伺服環路的工作原理,伺服環路其實也是一直在插,不斷的解算各個伺服周期的命令,然後演算法以讀表的方式不斷的讀取各個周期的指令。
講到這裡,整個驅動器的相關知識就介紹完了。簡單總結就是,驅動器有硬體和韌體兩部分,硬體部分負責控制電機的換向,電流調節,回饋訊號採集等;韌體部分或者叫軟體部分,則是通過硬體的各種回饋訊號,周而復的運算,並將運算結果輸出到硬體。其實整個伺服系統工作的過程,就是一個不斷糾偏的過程,大了就小點,小了就大點,沒有真正的靜止,一直運動,只是在幾個脈衝來回移動,這才是伺服系統的精髓,沒有真正的靜止。
4.電機分類
4.1電機原理
講電機的分類之前,我先從電機為什麼會運動講起,電機運動的本質是轉子磁場和定子磁場的相互吸引。只要轉子磁場和定子磁場的方向不一致,那麼就會有磁力吸引,也就會帶動轉子轉動。兩個磁場什麼時候的吸引力最大,那就是兩個磁場方向垂直的時候,這個應該好理解,我們小時候玩過磁鐵,當兩個磁鐵垂直的時候最不好把控,如圖4-1所示。
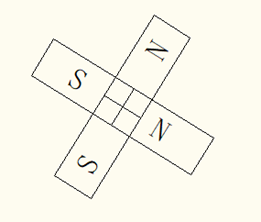
圖4-1
我們根據法拉第電磁感應定律知道,磁可以生電,電也可以生磁,電流方向的變化就會導致磁場方向的變化,早期的電機就是根據這個原理來實現的。我們知道直流電的出現是比交流電早的,最早的電機就是他勵直流電機,他勵指的是電機的定子磁場需要單獨電源供電,其實就是一個線圈,你給他通電就會有磁場。定子通電後磁場的方向就確定了,不會隨時間改變。那麼要讓電機連續轉動就得連續不斷的切換轉子磁場的方向,磁場方向的切換由電刷來完成。每旋轉一定角度,轉子線圈中的電流方向就會改變,磁場方向也就會發生改變,從而得以讓電機連續轉動。這個原理的示意如圖4-2所示。
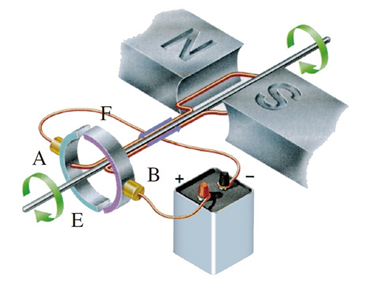
圖4-2
緊接著交流電出現了,交流電機也就出現了,常見有三相非同步和單相非同步電動機,那麼這個非同步指的是什麼呢?首先我們看下三相非同步電機的結構,如圖4-3所示,我們可以看到電機的轉子是沒有接到外部電源,不是永磁體,就是一個鼠籠型結構。根據法拉第電磁感應定律,磁是可以生電的,由於定子繞組是交流電,那麼電流方向是不斷變化的,則磁場方向也會變化。變化的磁場切割導體就會產生感應電動勢,從而產生感應電流,形成磁場,有了磁場就會相互吸引了,電機就能轉動了,非同步電機也叫感應電機。但是,轉子的感應磁場總會比定子原生磁場慢,這個很好理解,沒有原生磁場就沒有感應磁場。感應磁場比原生磁場慢就是我們說的非同步,非同步就是指的轉子磁場是非同步於定子磁場的。前面的他勵直流電機定子磁場是固定的,只要轉子有磁場,電機就會旋轉,這個也叫同步。
圖4-3
從這個現象我們可以知道,非同步電機的啟動轉矩不會很高,甚至重載的時候無法啟動。工業中非同步電機一般都是空載啟動,然後再掛負載,因為啟動後的轉矩還是相當可以的。反觀他勵直流電機,我們可以知道它有很高的啟動轉矩,因為轉子在沒有轉動的時候就是一根銅線,啟動瞬間繞組中的電流會很大,很大的電流就會對應很大的磁場,就可以快速驅動轉子轉起來。當轉子轉起來後,這個時候轉子的繞組中會有反電動勢,這個反電動勢是由通電導體切割磁感線產生的。反電動勢的方向是和供電電壓相反的,所以,當電機轉起來後,繞組中的有效電壓=供電電壓–反電動勢。
這兩種類型的電機是基礎,即使現在距離電機發明一百多年,我們實際使用的還是這兩種類型的電機,只不過是有了很多改進,包括材料和結構。目前,三相非同步電動機主要應用是中大功率,以及超大功率的場合,製造成本比較低,供電方便,不需要驅動器。以他勵直流電機為基礎模型的就衍生了永磁型有刷或者無刷直流電機,從這裡開始講的電機就是我們運動控制系統中經常使用的電機,也是我要介紹的主要電機類型。
4.2永磁同步電機
他勵直流電機雖然有我們前面說的優點,但也有不方便的地方,需要兩個電源分別給勵磁繞組和轉子繞組供電,一旦勵磁繞組燒壞維修也不方便。結構也比較複雜,勵磁繞組需要繞在硅鋼片上才有比較大的磁場,想要增加磁場強度就只能繞更多圈銅線或者通更大的電流,這些都限制了他勵直流電機的發展。後來隨著永磁磁性材料的發展,永磁體的磁場強度越來越大,這就給永磁體替代勵磁繞組提供了可能,這裡我將常用於電機的永磁材料做個簡單介紹。如表4-1
表4-1
|
縮寫 |
名稱 |
特性描述 |
|
Ferrite |
鐵氧磁性材料 |
鐵氧磁鐵是我們小時候都玩過的,這種材料便宜,但磁性也比較弱,溫度對磁場強度的影響大,負溫度係數。目前只有非常便宜的電機才會用這種永磁體,玩具賽車的直流電機應該就是這個永磁體。 |
|
AlNiCo |
鋁鎳鈷磁性材料 |
鋁鎳鈷這種材料的磁場強度比鐵氧磁鐵的要強,溫度對磁場強度的影響也比鐵氧磁鐵的小,也是負溫度係數。目前比較經濟的電機中是這種磁性材料,並且這個材料穩定性很高。 |
|
NdFeB |
汝鐵硼磁性材料 |
汝鐵硼是最近二十多年發展起來的磁性材料,被稱為永磁之王,磁場強度最強。目前高性能的伺服電機都是用這種材料作為永磁體,價格也比較貴。 |
|
SmCo |
釤鈷磁性材料 |
釤鈷這種磁性材料的磁場強度不如汝鐵硼,但比其他材料要強。它的溫度範圍比汝鐵硼要高不少,應用於一些環境溫度很高的場合 |
目前工業應用的永磁電機以鋁鎳鈷和汝鐵硼為主,磁場越強,輸出同樣的轉矩,就可以把電機做的越小,這對追求緊湊的設備是非常有幫助的。比如一些手持類的設備,電機太大的話沒辦法握在手裡,如齒科牙鑽。用永磁體代替勵磁繞組可以把電機做的更緊湊,也還有不錯的輸出轉矩,增加了電機的可靠性和一致性。
通過改進勵磁繞組,他勵直流電機就變成了我們現在使用的永磁直流有刷電機。永磁直流有刷電機,根據刷子材料可以分為金屬刷和碳刷;根據轉子繞組是否固定在鐵芯上,可以分為帶鐵芯的和空心杯的。圖4-4是帶鐵芯的金屬刷轉子:

圖4-4
這個金屬刷也可以是碳刷替代,碳刷的一些特性會優於金屬刷,當然也會存在一些不足。這裡我把兩種刷子的特性羅列如表4-2
表4-2
|
名稱 |
優點 |
缺點 |
應用 |
|
金屬刷 |
接觸電阻小 線性度好 真空環境可用 |
能承受的線速度小,一般小於1.5m/s,不耐磨損,不適應頻繁啟停 |
連續運轉 高效率要求 |
|
碳刷 |
耐磨,線速度大,可以到3-5m/s,耐衝擊 |
環境濕度要求,無法應用於真空環境 有碳粉 |
頻繁啟停 長壽命要求
|
這個帶鐵芯的轉子有個問題,就是會有齒槽效應,齒槽響應就是當你用手轉動轉子的時候會有一卡一卡的感覺,齒槽效應是鐵芯被永磁體磁化導致的。這個一卡一卡會導致電機輸出轉矩的波動,對高精尖應用是有非常大不利影響的,並且電機越大這個齒槽效應給你的感覺就越明顯。前面我們講了鐵芯是為了增強磁場和固定繞組用的,那麼這個鐵芯是不是可以不要呢?答案是可以的,這個就是劃時代進步的空心杯電機。空心杯的繞組就像一個杯子,中間是空的,沒有鐵芯去支撐銅線的固定,這個對製造製程和繞組技術有非常高的要求。目前中國空心杯電機市場基本被國外廠家佔有,這就可以看到空心杯繞組的製造難度。空心杯繞組實物如圖4-5,繞組沒有靠鐵芯支撐,完全是空心的,定子永磁體在中間,這樣的設計在轉動的時候就沒有齒槽效應了。由於沒有了鐵芯,同樣情況下繞組的磁場強度會更弱一些,空心杯電機的轉矩會更小,沒有了鐵芯,耐熱性也會比有鐵芯的差一些。
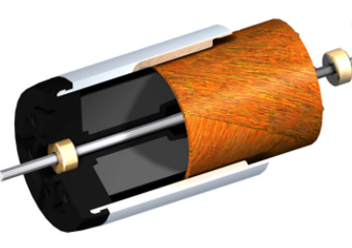
圖4-5
到這裡,永磁直流有刷空心杯電機已經與早期的他勵直流電機的結構有了很大變化,定子由繞組變成了永磁體,轉子由帶鐵芯的變成了空心杯的,剩下的改進就是電刷了,從金屬刷到碳刷就是一種改進。但無論電刷是什麼材料,電刷的存在還是有些問題,電火花,電磁雜訊,壽命等。同時,隨著電力電子器件的快速發展,讓電子換向替代電刷換向成為了可能,這樣就出現了永磁直流無刷電機。
永磁直流無刷電機不僅解決了電火花,電磁雜訊的問題,由於沒有了電刷,電機的壽命也大大延長。永磁直流無刷電機的繞組也分為帶鐵芯的和空心杯結構,圖4-6是空心杯直流無刷,這個時候定子是繞組,轉子是永磁體。
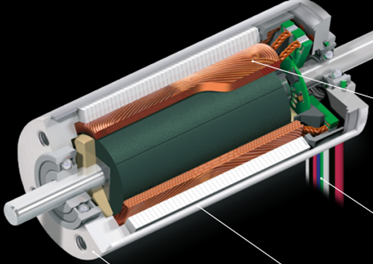
圖4-6
圖4-7是帶鐵芯的直流無刷電機,由於鐵芯的存在,同樣會有齒槽效應。
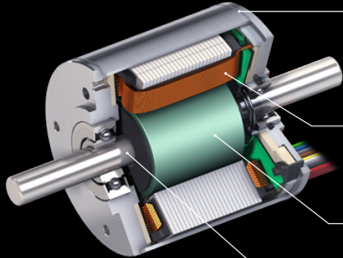
圖4-7
繞組部分的結構是肉眼可見的,怎麼繞一看就知道,但還有一個方面也會影響電機的性能,那就是永磁體的充磁方式,永磁體不同的充磁方式就會有不同的效果。充磁方式為拋物線狀的永磁體,電機繞組反電動勢為正弦波;充磁方式為瓦片狀的永磁體,電機反電動勢為類似方波形狀,有平頂。反電動勢為正弦波的叫PMSM,反電動勢為平頂的叫BLDC,這是中國經常的叫法,包括很多權威平台,但這個觀點我大不贊同。首先,PMSM是英文permanet magnet synchronize motor的縮寫,叫永磁同步電機,BLDC是英文brushless direct current的縮寫,就是直流無刷的意思。其實,帶永磁體的直流電機都是永磁同步電機,同步是相對於非同步來講的,非同步電機的概念我們前面介紹了。只要是直流無機械電刷的都可以叫直流無刷電機,而不能以反電動勢波形來區分PMSM和BLDC。
所以,我認為直流永磁同步電機應該就是分為,直流無刷永磁同步和直流有刷永磁同步這麼兩大類,再去細分反電動勢波形,繞組結構,電刷種類。但是,要注意反電動勢為正弦波形的永磁同步電機的轉矩脈動要比反電動勢為方波的電機的轉矩脈動小,目前高端的直流永磁同步電機的反電動勢大部分都是正弦波形。
4.3步進電機
還有一類旋轉電機是我們應用的較多的,就是步進電機。步進電機與永磁同步電機的結構上有很大區別,步進電機的定子有很多凸齒,轉子也有很多凸齒,通常結構如下圖4-8
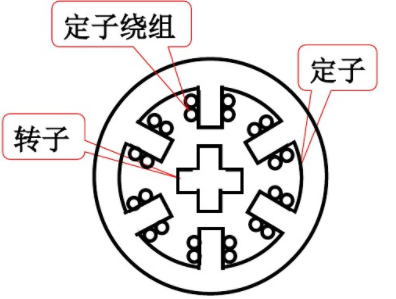
圖4-8
實際上轉子和定子的凸齒比這個多的多,如常見的1.8度步進,就是一圈200步,也就是定子和轉子凸齒的磁場相吸保持穩定的位置有200個。步進電機的結構也就決定了它的控制方式和永磁直流有刷或者無刷電機的完全不一樣,如兩相步進有A+ A- B+ B-四根線,分別對應兩相繞組。當轉子轉到一個位置之後,這個時候繞組當中是一直通電的,而不是像伺服電機停住的時候一直在來回切換繞組通電的順序和方向,會有幾個脈衝的來回跳。但是這個一直通電的問題就是會發熱,這是步進電機的一個缺點,尤其是功率大的步進電機,僅使能的時候發熱很明顯,所以步進電機的效率通常不高。步進電機停在一個位置的時候不會有抖動,這個也是它的優點,對於不允許抖動的應用也許非常適合。
步進電機的連續轉動,就是頻繁的切換A B相的通電順序,切換的越快,電機轉的也就越快。切換A B線的通電方向,就可以讓電機反轉。但如果在啟動瞬間就給很快的切換頻率,電機不一定能正常啟動,就是會出現丟步的情況,因為步進電機沒有感測器回饋轉子位置,轉子是否已經跟上定子磁場的變化是不得而知的。所以,步進電機的加速度是遠遠比不了伺服電機的,然後A B相的切換頻率也會受電流上升的速度影響,就是切換頻率會受限制,這也就限制了步進電機的最高轉速,一般步進電機的工作轉速就是六七百轉每分鐘差不多了,再快就很容易丟步。
有的人可能會想,步進電機安裝編碼器是不是就可以當做伺服電機使用?答案是步進電機加編碼器≠伺服電機,這個是很多人容易誤解的,認為伺服電機就是比步進電機多了一個編碼器,其實不是這樣的,因為電機的結構和控制方式都不一樣。即使給步進電機裝了編碼器,它還是步進電機,這個是步進電機的結構決定的。這就好比牛和羊都吃草,羊吃再多的草也不能長羊那麼大,不一樣就是不一樣。
步進電機的型號比較少,一般都以法蘭尺寸命名,如32 45等。步進電機的價格相比伺服電機也便宜,應用還是非常廣泛的,一般電機加驅動器也就幾百元。中國比較有名的是雷賽步進,便宜好用。
4.4直線電機
至此,旋轉電機的大部分知識就介紹完了,接下來我們看下直線電機,直線電機其實就類似於把旋轉電機剖開拉直。直線電機的最大優點是沒有背隙,這個是旋轉電機連接絲桿無法比擬的,其次直線電機還可以獲得很大的加速度,很高的定位精度。直線電機由定子和動子兩部分組成,定子是永磁體,動子是繞組,原理和旋轉電機是一樣的。也分為有鐵芯的平板直線電機和無鐵芯的U型直線電機,有鐵芯的一樣會有齒槽效應。直線電機的實物如下圖4-9和圖4-10

圖4-9
圖4-9是帶鐵芯的直線電機結構,永磁體是固定於底座上,導軌支撐動子。當動子繞組通電會產生磁場,和定子的磁場相互吸引就推動動子移動,不停的切換繞組的通電順序,磁場的方向就會連續變化,就能讓動子連續移動了。這個就是直線電機的原理,和旋轉電機是一樣的。

圖4-10
圖4-10是無鐵芯的直線電機實物,也叫U型,就是永磁體磁軌是U型的。這個的原理和有有鐵芯的直線電機是一樣的,相比於有鐵芯的直線電機,這種就是沒有齒槽效應,輸出的轉矩就會更平順。對於運動軌跡有嚴格要求的應用,無鐵芯的電機更合適,但無鐵芯的推力相比之下也會比有鐵芯的小,這個旋轉電機是一樣的。由於直線電機的優良性能,目前直線電機的應用越來越多,且都是應用於高精密行業,如半導體、雷射、基因檢測等行業。
4.5總結
以上電機的原理都一樣,都是磁場吸引產生力的輸出,接下來我們了解下電機的主要參數和特性。由於永磁體的磁場強度在製造完成的時候已經確定,所以只有繞組產生的磁場可變,繞組磁場越大,磁場的吸引就越強,輸出的力也就越大。繞組的尺寸和匝數在電機製造完成的時候已經確定,要想調節繞組磁場的強度,就只需要控制繞組中的電流,電流越大,磁場越強。這個和我們讀小學時候的科學實驗一樣,把銅線繞在鐵釘上,給銅線通電鐵釘就會有磁力,電流越大,鐵釘的磁力也就越大。由此可知,控制電機繞組當中的電流就是控制電機的輸出轉矩,電流和電機的輸出轉矩是線性關係,這個比例就叫轉矩常數,轉矩常數的單位是mNm/A,就是1A電流能產生多少轉矩,直線電機是N/A。這是一個非常重要的結論,知道這個關係後,對我們控制電機就非常簡單方便了。還有幾個與電機相關的重要參數,我這裡都一一介紹下,並簡單解釋下他們的含義,以及他們相互之間的關係,如表4-3,打鉤的表示有這個參數
|
參數名稱 |
旋轉電機 |
直線電機 |
|
額定電流 |
√ |
√ |
|
峰值電流 |
√ |
√ |
|
轉矩常數 |
√ |
|
|
力常數 |
|
√ |
|
反電動勢 |
√ |
√ |
|
極對數 |
√ |
|
|
磁極距 |
|
√ |
額定電流,額定即為持續,一直的意思,就是表示可以7×24小時連續不斷工作的電流,且電機不會燒壞。但電機的溫度會升高,具體升高多少各廠家不同型號都有區別,常見的一般是會到85℃,或者125℃,一些鑽探用的特種電機會承受更高溫度。前面我們提到電機的輸出轉矩和電流之間是線性關係,如果僅讓電機以額定電流工作就有點浪費了。實際上電機在不同工作階段需要的轉矩是差別很大的,如果把額定當做最大值限定,就完全發揮不出電機的全部性能了,所以就要峰值電流。其實很多廠家沒有標電機的峰值電流,也的標示的峰值電流是額定電流的2倍、3倍、5倍、6倍等,沒有統一標準。我們不禁要問,為什麼沒有統一標準,首先我們想想電機為什麼會燒壞?電機燒壞的根本原因是超過了允許的最高繞組溫度,而電機熱的主要來源就是繞組通電時候的發熱,發熱功率P=I2RT,I是電流,R是電阻,T是累積時間。電流I和發熱功率P是指數關係,就是電流增加一倍,發熱功率就是四倍,這個增加的非常之快。但我們知道,發熱的同時也在散熱,只要散熱足夠快,比如使用風冷或者強水冷,讓產生的熱立馬散掉,那麼即使給電機中幾倍於額定值的電流,也不會燒壞電機。理解了這一點之後,我們就知道峰值電流為什麼有這麼多版本了,因為最終燒不燒壞電機還是熱的問題。環境溫度也對熱有影響,讓電機在烈日下工作和讓電機在冰箱中工作是完全不一樣的結果,在烈日下可能額定值都不能使用了,因為環境溫度太高,而電機的指標基本都是基於25℃,空氣自然對流的環境。超過標準環境溫度使用時,就得降低指標再使用。這是一種比較粗略的估算方法,隨著技術的發展,現在很多電機都內置有溫度感測器,這是最準確的獲取繞組溫度的方法。完全不用關心峰值電流可以幾倍,我只要周期性的監控感測器的溫度,如果溫度低我就可以加大電流,完全發揮電機的性能。
轉矩常數是表示旋轉電機輸出轉矩的一個指標,單位是Nm/A,力常數是表示直線電機輸出推力的一個指標,單位N/A。這個數值越大,就表示同樣電流的情況下輸出的力更大,這個在選擇驅動的時候可以納入考量範圍。這個兩個的名字都是常數,也就是說在電機製造完成後就已經確定不變的。
反電動勢是電機在轉動的時候產生的,是銅線切割磁感線產生的感應電動勢,是阻礙電機運轉的。簡單說就是,當你給繞組通正向電壓,這個時候電機在轉動,同時繞組會感應出一個反向電壓,反指的就是和控制電壓方向相反。控制電壓–反電動勢才是然組兩端的有效電壓,這個電壓除以繞組電阻就可以得到繞組中的電流。反電動勢的單位是rpm/V或者m/s/V,表示多少轉每分鐘的時候產生多少伏特的反向電壓,或者直線電機在幾米每秒運動的時候產生多少伏特的反向電壓。
極對數是旋轉無刷電機的概念,磁極距是直線電機的概念,兩個指標都是為了告訴控制系統換相的位置間隔。比如4極對的旋轉電機,轉一圈需要換向的次數就是1極對電機的4倍,驅動器只有知道了這個參數才能更準備的給電機換相。磁極距和極對數類似,指的定子一個N和一個S磁鐵的距離,知道了這個參數後,驅動器就知道怎樣換相了。
最後,講講在使用電機過程中分析問題的一個重要指標——電流。這裡可能有人要問,為什麼是電流,而不是電壓。可以回想下你曾經用過的那麼多驅動器中,有哪個驅動器讓你填過電機的電壓這個參數?沒有吧,但電流參數一定有,由此可見電流的重要性,電壓都沒出現過。為什麼電流如此重要,那就得看看電機的開環特性曲線,這個相信大家都有概念,隨著外部負載的增加,電機的轉速降低,負載繼續增加,直到電機堵轉,如下圖4-11
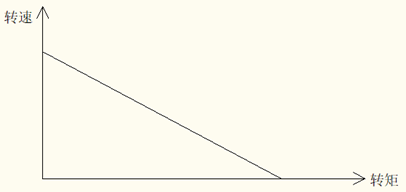
圖4-11
開環特性曲線是電機繞組兩端電壓固定不變的情況下,轉速和轉矩隨負載變化的情況。既然電壓固定不變,轉速和轉矩都有這麼多變數,那還關心電壓幹嘛,關心電壓只能得出一些錯誤的結論。因為電流是直接影響電機輸出轉矩的,關心電流才對。電壓不變但轉速發生了變化是因為負載變了,負載轉矩小的時候電機轉速高,反電動勢大,反電動勢抵消了大部分電壓,最終產生電流的有效電壓很小;當負載轉矩大的時候電機轉速低,反電動勢小,反電動勢只抵消了小部分電壓,最終產生電流的有效電壓很大,電流也就會很大。從這個分析可以先看出,只有電流是隨外部負載變化的,這就是為什麼要關心電流的原因。
有一個情況下還是需要關心電壓的,因為電壓會影響電機的最高轉速,比如在24V供電情況下電機的最高轉速能到5000rpm,但你希望電機轉6000rpm,這個時候你就需要升壓了,但不會影響轉矩和電流的線性關係。只要最高電壓夠用了,其實也就沒電壓什麼事了,還是看電流,電流為王。
5.編碼器
前面講了控制卡、驅動器、電機三大部分,每一部分都很重要,但也不要低估回饋單元的重要性。如果沒有回饋單元,前面三部分做的再好也是發揮不出作用,感測器技術在各行各業都發揮著著舉足輕重的作用。我們接下來主要介紹運動控制系統中常用的感測器,也就是我們常說的編碼器。這一部分要說的非常詳細很難,盡量覆蓋面廣,用通俗易懂的語言介紹。
5.1編碼器分類
現在我們常用的編碼器根據實現原理可以分為光電式、電磁式、電感式;根據傳輸訊號種類可以將感測器分為正交方波訊號、模擬量電壓訊號、匯流排協議;根據掉電數據是否丟失可以將感測器分為增量式和絕對值式,絕對值的又可分為真絕對和偽絕對。首先,我們按實現原理一一介紹各種類型編碼器的實現過程,霍爾一般不認為是編碼器,其實也可以算一個低解析度的編碼器,這裡我們也一起簡單介紹下。
5.2霍爾感測器
霍爾感測器是用霍爾效應製造的感測器,其原理是電磁感應原理。當正高斯的磁場強度(S極)達到一定閾值後,感測器的電訊號會發生變化,然後經過電路對訊號進行處理,輸出的就是高低電平訊號。
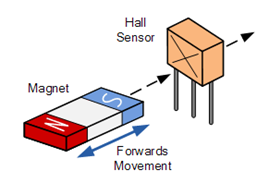
圖5-1
如圖5-1所示,當磁鐵的S極接近霍爾感測器,達到觸發閾值時輸出電平就會從0翻轉為1,當N極接近霍爾感測器達到觸發閾值時,輸出電平就會從1翻轉為0。當知道了這個特性之後,我們就可以用霍爾感測器去檢測轉子的位置了。
我們看一個永磁體一極對電機的模型,如下圖5-2所示,三個霍爾感測器間隔120°均勻分布。轉子在轉動的時候就會觸發霍爾感測器狀態的翻轉,遇到S極輸出高電平,遇到N極輸出低電平。每個霍爾感測器導通的位置是相等的,都是180°,最終三個霍爾感測器就會連續輸出110 010 011 001 101 100的狀態。根據霍爾的狀態可以完成電機的換相,同時也可以通過霍爾感測器的狀態知道電機旋轉的方向和旋轉的速度。只不過霍爾感測器的解析度很低,對速度的回饋會不太準確,位置就更不準確了,一般是應用於對速度穩定性要求不高的場合,其主要作用還是檢測轉子位置,幫助驅動器給電機換相。
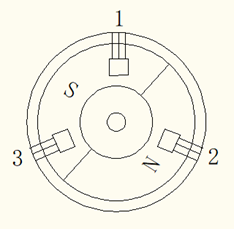
圖5-2
5.3光電式編碼器

圖5-3
光電式感測器的原理和結構如圖5-3所示,主要由光柵盤、光源和光感測器組成,當光源通過長條的小孔後就會被感測器接收,這個時候感測器的狀態就會發生改變,被擋住的時候感測器就檢測不到訊號。光柵盤的刻線數量就是這個編碼器的線數,線數越多製造難度越大,線數越多回饋的角度變化也就越精細。要增加物理刻線的數量是非常難的,但我們實際使用又對精度的要求很高,這個時候天才的工程師們就想到了一個辦法,用兩個感測器按1/4光柵距分布,這裡我就可以得到兩組電氣角度相差90°的訊號A和B,注意這個90°是電氣角度,電氣周期是一個高電平加一個低電平。這樣就達到了對訊號細分的效果,這個就是我們常說的數字增量編碼器的4倍頻,因為兩組訊號剛好差90°電氣角度,兩個訊號的高低電平組合就有4種情況。這樣在不增加物理刻線的情況下就把解析度提高了4倍,那麼是否可以8倍頻或者16倍頻呢?理論上是可以的,但製造難度太大,對硬體的要求也太高,成本也會增加,關鍵這只是通過編碼方式增加解析度,沒有本質提高編碼器的精度,4倍頻已經足夠用,且可靠穩定。
常見光電編碼器還有一個Z訊號,有的也叫index訊號,或者reference訊號。這個訊號每圈只輸出一次,可以當做為一個參考點,回零的時候可以用這個訊號作為零點。ABZ三相訊號可以是單端訊號,但大部分是差分訊號,這樣有利於訊號的穩定傳輸。
光電式編碼器的優點是穩定可靠,精度高,抗干擾強。缺點是需要使用環境比較乾淨,不能有灰塵進入光柵盤,或者通過後期的防護等級設計來解決這個問題。光電編碼器的價格也會比較貴,這個是由製造製程決定的,製造難度也大。
5.4磁性編碼器
磁性編碼器,顧名思義就是用的磁場檢測技術,是通過磁場變化來感知物體的運動。再進一步了解磁感測器之前,我們先了解下技術背景,巨磁電阻技術(Giant Magneto Resistance),簡寫為GMR。GMR的特性就是,當外部的磁場方向平行它時,兩端電阻最小;當外部磁場反向於它時,兩端電阻最大。其原理如圖5-4所示,左右兩個方框表示GMR元件,中間的箭頭表示感應磁場線的方向。當磁場方向和箭頭方向一致時,元件兩端的電阻最小,當磁場方向和箭頭方向反向時,元件兩端的電阻最大,在0-180度之間時的電阻值會隨著角度的改變而變化。

圖5-4
當有了這個特性的元件後,我們就能檢測到磁場的轉動,如果這個磁場和電機轉子固定在一起的,電機轉動時候就帶著這個磁場旋轉,這樣離檢測轉子的轉動就近了一步。但是這個還完全不夠,不能輸出周期性的電訊號,這個時候工程師們又想到了惠斯通電橋,如圖5-5所示
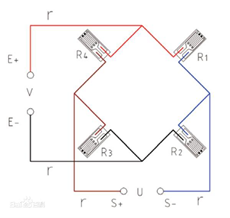
圖5-5
惠斯通電橋有四個橋臂,有一個輸入電壓源S,以及一個輸出電源E,當4個電阻的阻值一樣的時候,輸出的電壓為零。當電阻變化的時候,輸出的電壓在±S之間變化,把這四個橋臂用巨磁電阻代替的話,就可以檢測轉子的變化,並輸出等幅的正弦波模擬電壓訊號。一個惠斯通電橋產生的訊號,只能檢測到轉子轉動的快慢,但還無法檢測轉子的方向,所以需要兩個惠斯通電橋,這兩個惠斯通電橋輸出的訊號就是我們耳熟能詳的A B通道訊號。詳細內部結構原理如圖5-6所示,
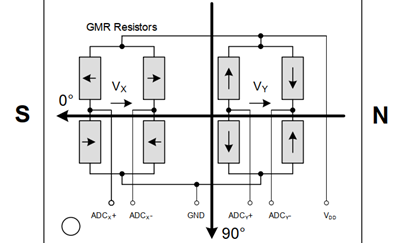
圖5-6
圖5-6中的兩個惠斯通電橋組合就可以實現轉子方向的判定,磁場旋轉方向不同,則兩個電橋輸出電壓的關係是不一樣的。圖中的ADCX+ ADCX–是一組模擬量訊號,ADCY+ ADCY–是另一組訊號,當磁場在連續不斷旋轉的時候,輸出的電壓波形如圖5-7所示:
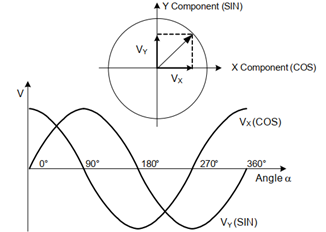
圖5-7
這個時候輸出的訊號是sin-cos模擬電壓訊號,如果驅動器可以直接接收這種訊號,那就可以直接使用,驅動器內部會去做細分,理論上的細分可以很高。如果驅動器無法接收sin-cos模擬量訊號,那就得用細分電路先做細分,輸出A+A- B+B-的正交方波訊號。細分就是對訊號做插值,比如一個周期內每1度插值一次,那麼最終輸出的脈衝頻率就是360*4=1440,乘4是A B兩個訊號4倍頻的意思。實際上,這個細分倍數可以很高,比如幾千到幾萬,但過高的倍數其實沒什麼意義,因為那只是理論值,實際上編碼器是沒有那麼高的精度。細分基本都是靠專業晶片完成的,靠軟體細分的處理速度太慢,這個細分晶片是比較昂貴的,比較有名的大牌就是iC-huas。磁性編碼器也是可以有index訊號的,只是這裡沒有說明,其index的功能是和光電編碼器一樣的。
5.5電感式編碼器
電感式感測器的原理還是電磁感應原理,它有一個感應線圈,這個線圈就是普通的線圈。當磁場強度和方向變化時,線圈中就會有感應電動勢,這個感應電動勢就會隨著磁場周期性的變化,這樣就能檢測出轉子在轉動,周期越短則轉動的越快。只有一個感應線圈只能判斷轉子在轉動,而無法判斷轉子的轉動方向,如果再加一個感應線圈,讓兩者形成90°的正交關係,像上文的磁性編碼器那樣,就可以知道轉子轉動的方向和速度了。再經過一些檢測電路就可以輸出正常的sin-cos模擬量訊號,或者A+ A- B+ B-的兩通道方波訊號。電感式編碼器好像無法輸出每轉的index訊號,目前沒見過,從原理來看好像也無法實現,除非用其他電路是專門輸出一個index訊號。
5.6直線編碼器
前面主要是講旋轉運動的編碼器,其實還有直線運動的編碼器,其原理都差不多,也分為光電式的和磁感應式的。直線編碼器主要由兩部分構成,一個是讀數頭,一個是光柵尺或者磁刪尺,如下圖5-8所示,上面的就是讀數頭,下面的就是尺子,當兩者有相對移動時就會有電訊號的輸出,就能知道物體的移動位置。

圖5-8
光柵尺利用的是莫爾條紋的原理,莫爾條紋是18世紀法國研究人員莫爾發現的光學現象,1874年英國物理學家瑞利發現了莫爾條紋的科學和工程價值,提出了用莫爾條紋來測量光柵移動的可能性,為計量光柵的發展奠定了理論基礎。
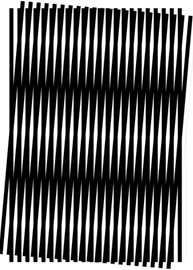
圖5-9
圖5-9就是莫爾條紋,光柵尺和讀數頭得結構正好就是這樣。光柵尺的微觀結構如圖5-10所示,一般是20μm或者50μm的均勻刻線,光柵尺的基材有金屬的,也有玻璃的。光柵尺的刻線與讀數頭上光學元件和指示光柵配合就形成了莫爾條紋,當物體移動的時候就會輸出測量到的電訊號,這個訊號可以是sin-cos模擬量,也可以A+ A- B+ B-的正交方波訊號,這樣就可以當做一個編碼器使用了。

圖5-10
磁柵尺的原理是我們前文提到的巨磁電阻技術,只不過是用到了直線運動上,磁柵尺的結構就是連續不斷的N S N S循環。製造的時候需要給磁柵尺充磁,充磁完成後的效果如下圖5-11所示,當讀數頭和尺子相對移動時,讀數頭上的元件就會感應到磁場變化,然後輸出電訊號。輸出的電訊號可以是sin-cos模擬量,或者是已經細分後的A+ A- B+ B-的方波正交訊號。

圖5-11
相比之下,光柵尺的的精度會比磁刪尺的要高,抗干擾強,價格也會更貴。光柵尺的缺點是要求環境乾淨,無粉塵,否則讀數頭可能無法識別。磁刪尺的優點是便宜,不懼灰塵,缺點是是精度不如光柵尺,強磁環境無法適用,尺子被撞擊可能會失去磁性,無法使用。可以根據實際使用需求選擇合適的尺子和讀數頭。
5.7絕對值感測器
絕對值感測器是相對於增量式感測器來說的,增量式感測器是只要驅動不斷電,歸零後驅動能夠知道電機位置,斷電後位置數據丟失。絕對值類型的就是可以在斷電後還能記住位置,並在位置變動後還能更新最新的位置。絕對值編碼器又分為偽絕對值編碼器,以日係為主,和真絕對值編碼器,以歐美係為主。偽絕對值編碼器需要電池供電,是電池還在讓晶片工作,萬一電池沒電則位置數據丟失。這種偽絕對編碼器的優點就是製造簡單,結構緊湊,成本低,對於能接受更換電池的應用還是非常具有性價比的,缺點就是有電池這個不確定性因素,一般電池可能也就用2年。真絕對值編碼器不需要電池輔助,所有電源關掉後都可以記錄當前位置,並且能檢測斷電後的位置變化,可靠性高。真絕對值編碼器的製造成本非常高,大概比偽絕對值編碼器價格高一個數量級,體積也比較大,但可以終生免維護,非常適合可靠性要求高的應用。
那麼絕對值編碼器為什麼可以在設備斷電後還能知道位置呢?這裡只說真絕對值編碼器,偽絕對值的是靠電池在工作的,本質上和增量的沒有區別。真絕對值編碼器的發明不得不說非常巧妙,其原理是借鑒了機械手錶的時分秒三個針,當我們知道了時分秒的位置,那麼一定知道此刻是幾時幾分幾秒。絕對值編碼器正式利用了這個原理,只不過是遠遠不只時分秒三個針,檢測位置的感測器非常的多,最終通過編碼就知道了轉子的準確位置,單圈絕對值編碼器的結構原理下圖5-12所示:

圖5-12
這個圖只是展示原理,實際上的圈數比這個多得多,這個是一個4位的絕對值編碼器。只要這個編碼器有電,那麼它的位置肯定是唯一,因為徑向上的每一格的編碼是唯一的,上電的瞬間就能知道位置,即使斷電後被轉動過也不受影響。現在常見的絕對值編碼器有14位、16位、17位、20位等等,這個指標描述的是單圈的解析度,如果絕對值編碼器是單圈的,則只有這一個指標。對很多應用來說,單圈編碼器是不夠的,這就提出了多圈的要求,怎麼實現這個多圈計數呢?這裡還是利用了機械手錶的原理,多圈的實現就是再加一個光柵盤,一個光柵盤負責計單圈的位置,另外一個光柵盤負責計多圈的圈數,兩者一組合就可以知道多圈的準確位置了,這個還是很巧妙的。
現在原理實現了,那麼訊號要怎樣傳輸呢?這個是絕對值編碼器和大多數增量編碼器的一個主要區別,絕對值編碼器不是通過脈衝計數或者sin-cos模擬量訊號來傳遞位置資訊的,是通過通訊的方式的,叫絕對值編碼器通訊協議。實現的過程就是周期性的上傳位置數據,比如5K,10K的頻率上傳位置數據給驅動器,一般是6根接線,兩根電源線,兩根時鐘線,兩根數據線。驅動器要能識別編碼器的數據,前提是他們有相同的通訊協議,還要能正常解碼。
目前常見的絕對值編碼器通訊協議有SSI、Biss-C、EnDat2.2、HIPERFACE、多摩川協議等,這些通訊協議都是為了完成數據的傳輸,只是實現的方式有些區別。對協議細節感興趣的可以查閱相關資料,這裡就不展開講了,其原理和第二章講的三層模型是一樣的,一樣有物理層、數據鏈路層和應用層。
5.8總結
前面的描述中,我主要從編碼器的實現原理介紹了編碼器,是為了方便大家了解編碼器的本質,清楚不同類型編碼器的優缺點。實際使用過程中,大家習慣性的將編碼器分為三類,第一是數字增量編碼器,通俗的說就是輸出訊號為A B兩相正交的方波訊號;第二是模擬增量編碼器,輸出訊號為sin-cos模擬量電壓訊號,這個訊號需要驅動器內部細分才能有更高的精度;第三種就是絕對值編碼器。這種三種方法是沒有區分編碼器的實現原理,僅從電訊號的角度做了區別,區分的不夠精細。不同實現原理的編碼器還是有本質區別的,對設計階段的選型有指導意義。
編碼器選型應該有這麼幾個維度,第一先確定是用增量的還是絕對值的,絕對值的要用什麼協議的,增量的訊號要用什麼類型,sin-cos、正交方波、或者是走協議的。第二確定用哪種編碼器,是光電編碼器,磁性編碼器,電感式編碼器。這些類型的編碼器都各有優缺點,具體如下表5-1:
|
名稱 |
優點 |
缺點 |
|
光電式編碼器 |
精度高 抗干擾強 |
製造難度大、成本高 不耐油污、粉塵 |
|
磁性編碼器 |
價格便宜、體積小、製造簡單 |
精度不如光電編碼器 不適用強磁環境 |
|
電感器編碼器 |
緊湊、方便集成在PCB上 |
精度不高 成本相對磁編要高 |
所以,對於不同的應用,根據實際需要選擇合適的編碼器。在不考慮成本的情況下,一般建議優先考慮光電編碼器和絕對值編碼器,絕對值編碼的可以不用回零,非常方便。當然,磁性編碼器的成本低,應用範圍也很廣,電感編碼器相對於前兩者會少點。
6.調試
6.1調試的目的
首先,我們知道自動控制的過程就是是一個不斷糾偏的過程,多了就少給點,少了就多給點,這樣周而復始的進行下去。理論上講,只要我們人眼和手的反應足夠快,那麼我們每個人都是一個優秀的自動控制系統。但實際上我們無法做到很高的控制頻率,對人而言5Hz都已經快的不得了了,然而這個頻率對控制系統遠遠不夠。所以,我們就需要藉助微電子電路去幫我們實現想要的控制頻率,但電子電路僅僅是幫我們提高了控制頻率,而它不知到該該給多少控制量,控制量增加或者減小的速率應該是多少。該給多少控制量可以由指令和負回饋相加之後算出,而控制量增加和減小的速率就是我們調試需要完成的,不同的參數就會有不同的效果。通常我們所說的剛性強弱,對應的就是控制量變化的快慢,剛度越強,控制量變化越快,剛度越弱,控制量變化越慢。
調試的時候我們看的是指令和被控對象的響應關係,理論上指令給出後被控對象應該立即響應,不允許有滯後,但實際上無法做到,因為我們實際生活中的被控系統都是慣性環節,只是有的慣性大,有的慣性小。慣性環節說的就是一個物體或者一個系統有慣性,比如我們開汽車,當踩了剎車後車子不能立即停下來,而是會有一段減速距離,那麼我們說汽車就是一個慣性環節或者慣性系統。理解了這個之後,就可以很好的理解為什麼我們的運動控制系統是慣性環節了。既然已經有滯後了,那麼我們就應該儘可能的減小滯後,讓響應儘可能的緊跟指令,這也就是我們調試的目的。讓響應緊跟指令有兩個判別方法,一個是時域的,就是從時間軸上去看,我在t時刻給了指令,你的響應滯後了多久。另一個是頻域的方法,通過頻率響應來判定系統的響應特性,這個方法對分析系統非常有效且準確,稍後我們會講,先看下時域調試。
6.2時域調試
時域顧名思義就是在時間這個維度上看系統的響應特性,在講時域調試前,我們先了解下PID控制演算法。相信只要在運動控制這個圈子工作的人,一定知道PID控制演算法。首先,PID控制演算法是一種閉環控制演算法,起源於20世紀三四十年代,是為滿足過程式控制制而誕生的。PID控制演算法有三個環節,比例、積分、微分,最終的公式如下公式6-1所示

公式6-1
Kp是比例因子,Tt是積分時間常數,TD微分時間常數,u(t)是輸出量,e(t)是給定值和測量值之間的偏差量。從公式可知,比例因子是線性的調整偏差,偏差大則輸出量就會大,偏差小輸出就會小,但偏差很小的時候如果只有比例因子,最終無法達到偏差為0。偏差很小的時候就會出現,給控制量確實把偏差糾正了,但過頭了,往另外一個方向給控制量也會出現同樣的情況,最終就會在很小的範圍內一直振蕩下去,即只有比例環節的控制演算法無法消除靜態誤差。Kp的作用效果與值的大小成正相關係,越大作用越強,越小作用越弱,響應也就會越慢,過強又會引起超調。單比例調節的控制器,時域響應曲線大概會是如下圖6-1這個樣子,會一直振蕩下去
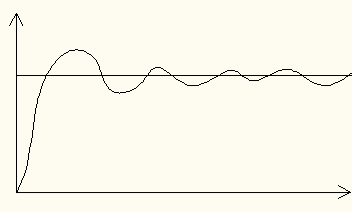
圖6-1
比例是無法消除靜態誤差的,靜態誤差只能由積分環節完成了,從公式6-1可知積分是將時間0-t的誤差累積,只要有累積誤差存在,積分就會去消除這個累積誤差。積分時間越短,則積分作用就越強,有的控制器是填積分時間的,也有控制器是填時1/Tt的,也就是增益,這個就是數值越大增益越強。有了積分環節後,理論上響應就可以完全等於指令,當然這要看參數是否合適,以及系統本身是否穩定。積分作用越強,誤差消除的就會越快,但太強的話也會引起共振,使系統穩定不下來,得根據響應曲線去調試參數。
其實,有了比例–積分兩個環節就可以使系統完全穩定了,為啥還要有微分環節呢?看下公式6-1,微分是對變化量求導,同樣的時間變化的值越大,則變化率就越大,再乘一個微分係數,則輸出量也就會隨著變化率成比例的增大。簡單點說就是,誤差變化的快,輸出的變化也會很快,誤差突變,輸出也突變,不會像比例–積分那樣慢慢調節。簡言之,就是動態性能更好,所以微分是調節動態性能的。微分因子越大則微分作用就越強,但微分這個環節不好掌控,過大的微分非常容易使系統振蕩,一般都有濾波器對訊號處理,不然系統非常容易振蕩。
PID三個環節都有的控制器就是比例–積分–微分控制器,這個比較常見,其實也有很多控制器是PI PD控制器,也可達到同樣的控制效果。最終控制器的效果就是演算法+硬體決定勝負,硬體還是看得見的,演算法只能靠時間積累。一個高級的控制器,遠遠不只PID三個參數,常見的有前饋參數,有加速度前饋、速度前饋,前饋對減小跟隨誤差和速度波動非常有效,還有濾波器,高通、低通、雙極濾波器等。
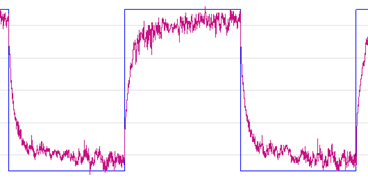
圖6-2
時域的調試過程如圖6-2所示,基本原則就是,先比例後積分微分,純比例的時候盡量少超調,再加積分,穩准快而不振蕩。微分視情況取捨,這個不好掌控,最終通過效果來判定。調試的過程就是試錯的過程,這個非常吃經驗,調的多了自然就會了。不同廠家的控制器,調試的基本方向相同,但還是會有些差別,拿到一款新的控制器需要先摸索下找到調試感覺。時域調試大概就這麼多吧,說簡單也簡單,說複雜也複雜,這個要看以什麼標準去調試,以及系統的硬體情況怎樣。有時候調到極致了還無法滿足要求,那就是不行,不行就是不行,調試也不能解決所有問題,比如硬體很爛。
6.3頻域調試
頻域調試是根據系統的頻率響應特性來判別系統的穩定性,學過自動控制原理的人應該都知道這個,我們通常稱之為頻率響應。那麼為什麼要搞頻率響應呢?之前我們說的時域分析不好嗎?通過看指令和響應的差別即可分析參數是否合適,既然這個頻率響應方法流傳下來了,那麼就一定有他的可取之處,這是我們學習新東西之前需要思考的問題。時域分析確實是能解決很多問題的,包括現在很多控制卡也都只有時域分析。但這裡存在一個問題,大多數人調試的過程中可能都遇到過,當我用時域分析的方法在某一個位置把參數優化後,在這個點很穩定,但在整個行程範圍內的其他位置會有異響,到那個點了又得去調,來來回回可能得調很多次,效果還不一定很好。這個時候就得用上頻域分析了,不同的點會有共振就是系統有幾個共振頻率,時域分析是發現不了這些共振頻率的,時域調試的時候就是簡單粗暴的降增益,加濾波,但這樣會犧牲系統的動態性能。
頻率響應是指系統對同樣幅值不同頻率激勵訊號的響應特性,通過響應特性曲線,我們就可以知道系統對不同頻率訊號的反應,是否有共振,頻寬是多少都會一清二楚。既然頻率響應這麼重要了,那我們就得搞清楚這個功能是怎麼一回事,我們沿著為什麼?是什麼?怎麼用?的思路去學習頻域分析。為什麼的問題前面已經解釋了,解決時域分析的短板,更高效直觀的去調試一個系統,接下來就要解決是什麼和怎麼用的問題。
頻域分析的過程就是,正弦波訊號激勵源輸入系統,然後測量經過系統後輸出正弦波的幅值和相角變化。為什麼是正弦波激勵源,這是正弦波的優良特性,非常方便我們分析問題,因為經過一個系統之後正弦波還是正弦波,只不過是幅值和相角變化了。幅值很好理解,就是正弦波的高度,相角就是輸入正弦波與輸出正弦波相位角的偏移,比如輸入的正弦波在0°的幅值是0,輸出正弦波在30°時刻的幅值為0,則我們稱之為相角滯後30°。幅值是可以放大或者縮小的,取決於系統的放大倍數,隨著頻率的增加,放大倍數也會降低;但相角一定是滯後的,頻率越高滯後的就越厲害。
我們假定系統的放大倍數是1,隨著頻率的增加,幅值會衰減,相角也會更加滯後。圖6-3和圖6-4是系統的激勵和響應曲線,藍色是激勵源,黃色是響應。圖6-4激勵訊號的頻率比圖6-3的更高,所以幅值更小,相角滯後更大。
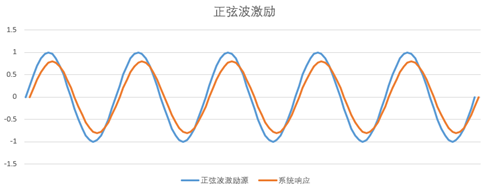
圖6-3
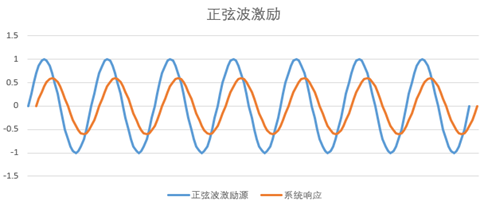
圖6-4
試想下,如果把頻率進一步增加會發生什麼,幅值更小,相角更加滯後,這就可能出現如圖6-5所示情況,就是頻率太快,響應跟不上。這還不是一般的跟不上,剛好滯後180°,這個就好比你讓我往左走,我還在往右邊去的路上,我剛到中間準備往左走,你馬上又說往右,根本不是一個節奏。對於系統來說,這種情況就很容易導致共振,是需要濾掉的頻率點,這就是頻率分析的厲害之處。

圖6-5
如果在圖6-5的基礎上繼續增加頻率,會出現什麼情況?那一定是相角繼續滯後,幅值繼續衰減,這個時候你會發現好像激勵和響應又到一個節奏上了,只不過是滯後的更多了。就是第一個指令我沒趕上,結果趕上第二個指令了,雖然滯後比較嚴重,但還是一個方向,至少不會相互激起來,不會共振,時序上的關係大致如下圖6-6。
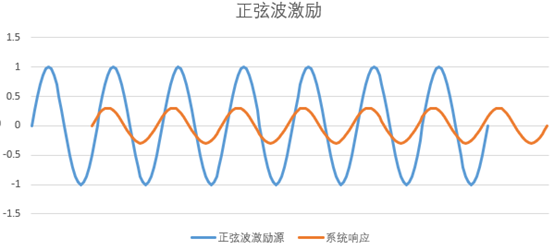
圖6-6
頻域分析或者頻率響應就是這麼個過程,解決了是什麼的問題,接下來就去聊聊怎麼用的問題,無論再怎麼高級的方法,最終都得落實到實際應用才有意義。如果通過正弦波激勵和響應的時序關係,讓我們去調參數,那估計是比時域調試更難,更不好解決問題。然而我們不用擔心這個問題,天才的數學家們早就給我想好辦法了,通過數學變換把時域的東西變換到頻率域,這樣就非常易於分析和調試了。這個人就是皮埃爾–西蒙·拉普拉斯,當然還有讓·巴普蒂斯·約瑟夫·傅里葉,但拉普拉斯變換相比傅里葉變換在這個領域使用的更廣,傅里葉變換需要函數在無窮遠處可積才能做變換。這兩位數學家都是法國人,想詳細了解的可以自己百度相關資料,或者看相關的教學影片,資源非常豐富。這裡只說結論,畢竟數學變換的過程是很枯燥的,並且都是好多年之後才能應用於工程實踐之中,但又不得不說這些數學知識對人類進步的意義非常之大。
數學變換是基礎理論,最終還得有工程化的工具才能方便調試,不然每次調試的時候還得把一堆公式擺出來,那簡直是太難了。有問題就需要解決問題,這個時候亨德里克·韋德·波特就發明了波特圖這個工程化工具,當然還有奈奎斯特曲線,相比之下波特圖的使用更常見,也更好理解,我們這裡就介紹波特圖。波特圖是由兩幅圖組成的,一個是幅頻圖,一個是相頻圖,幅頻圖是激勵訊號和響應訊號的幅值關係圖,相頻圖是激勵訊號和響應訊號的相角關係圖。
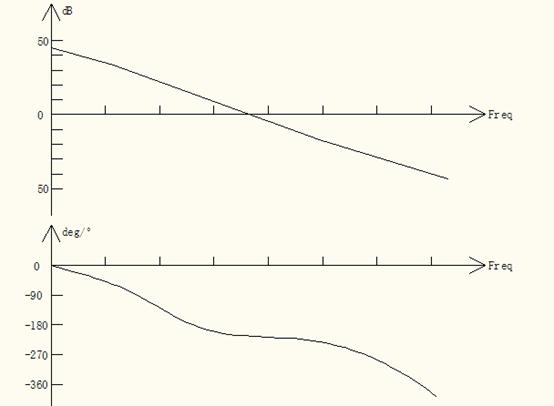
圖6-7
波特圖舉例如圖6-7,上半部分是幅頻圖,下半部分是相頻圖,這裡只是舉例說明,圖中尺寸不一定很精確。兩幅圖的橫坐標都是頻率,相頻圖的縱坐標是角度,這個好理解,幅頻圖的縱坐標是dB,這個可能不好理解。dB就是一種表示方式,因為如果是用十進位數字去表示,這幅圖得坐標軸就非常長了,看起來也不方便。我們看下用dB表示坐標軸是個什麼意思,dB就是取以10為底的對數值,如公式6-2所示
n = 10logAdB 公式6-2
其中A表示系統的放大倍數,如果A是1,計算結果為0dB,如果A是10,計算結果為10dB,如果A是100,計算結果為20dB,如果A是1000,計算結果為30dB。我們可以看到用dB來表示的數值會比直接數字表示要小很多,這就方便我們作圖了,就是換了一種表示方式而已,不要被這個嚇倒。橫坐標的頻率範圍如果很大,也需要取以10為底的對數值,方便作圖。圖6-7的含義是,隨著激勵訊號頻率的逐漸增加,系統對激勵訊號的放大倍數越來越小,隨著頻率的增加,相角也越來越滯後,理解到這個點就可以了。到這裡都是介紹頻率分析的原理和理論知識,接下來我會用一個實際產品的頻率分析工具,為大家介紹根據
波特圖去調試伺服系統的相關參數。
畫波特圖之前是要知道系統的傳遞函數的,但實際上我們不可能準確的知道系統的傳遞函數,或者說即使我們想盡辦法知道了系統的傳遞函數,這樣的代價也太大,花費的時間也太長,可能項目都結束了,傳遞函數還沒找到。那我們怎樣才能非常方便的得到波特圖,然後方便的去調試參數呢?那就是做頻率響應測試,不用關心系統的傳遞函數是啥,我就測系統對激勵訊號的反應,然後繪製出波特圖,這個是需要專業工具的,不是隨便都能測。這裡我以ACS的頻率分析工具FRF,詳細的介紹怎樣做頻率調試,之所以選擇這個工具是因為它非常好用。FRF工具如下圖6-8所示,左上就是波特圖的兩幅圖,上方是幅頻圖,下方是相頻圖。右邊是設置相關參數,可以選擇軸號,伺服環路,頻率響應測試的最小最大頻率頻率,激勵電流等。下方有訊號,伺服參數,測量分析,物理單位等資訊。
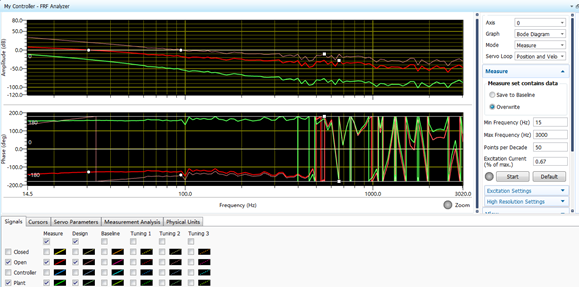
圖6-8
首先我們先了解下怎樣使用這個工具,下方signals選項卡有closed/ open/ controller/ plant四種,分別是閉環系統、開環系統、控制器、平台的波特圖,這個就是FRF工具的強大之處,可以看各個部分的頻率響應特性,要想很熟練的運用,需要搞清楚這四個波特圖分別代表什麼意思。Plant表示的是平台的波特圖,如直線的十字平台、龍門架、旋轉直驅結構等,反應的是機械部分的頻率響應,不與控制器掛鉤,通過plant可以看到機械結構的特性,在哪些頻率下會有共振。Controller表示的是單控制器的波特圖,簡單點說就是控制器自己的頻率響應特性,應該說任何物體都可以有頻率響應特性,控制器也是。Open為開環系統波特圖,是plant+controller的結果,也是我們最關心的。解釋下為什麼要關心開環波特圖,因為plant部分的頻率響應特性在機械安裝完成就已經確定,不會隨我們調試參數的變化而變化,我們能改變的只有控制器的波特圖。當控制器的參數被我們修改時,波特圖結果就會變化,如果平台在某個頻率點有一個尖峰的共振點,那麼我們就可以設置控制器的陷波(notch filter)參數來修正,兩者一疊加,最終就會沒有共振點,其實參數調試就是一種校正。Plant的特性固定,通過調節controller參數可以校正plant的缺陷,兩者一疊加就已經確定了系統的最終響應特性,這也就是為什麼關心開環波特圖的原因。Closed為閉環波特圖,一般沒有看。
知道了這幾個波特圖的區別後,我們看下波特圖幾個關鍵參數和穩定判據。幅頻圖中曲線與縱坐標0dB這條橫線會有一個交點,這個點叫增益穿越點,也就是放大倍數為1的頻率點,如下圖6-9所示。這點有三個參數,一個是穿越頻率,也就是我們說的頻寬,頻寬越大表示系統的動態特性越好,響應越快;第二個是相角,和第三個參數相位裕度是相關聯的,相位裕度30°是臨界穩定狀態,或者離不穩定已經很近了,我們調試的時候需要讓相位裕度大於30°。但也不要太大,太大就容易犧牲系統的動態特性,穩定性和動態性是相互矛盾的,我們要取一個中間值。讓系統頻寬儘可能的大而又穩定是我們調試時候追求的目標,一般建議相位裕度略大於30°。

圖6-9
另外一個關鍵點是相位穿越點,如下圖6-10所示,有相位穿越頻率,增益和增益裕度三個參數。這個點的相角會穿越180°或者-180°,這個點就是圖6-6所示的相角滯後180°,是容易共振的頻率點,對於這樣的點是需要非常關注的。自動控制原理中對相位穿越點穩定的要求是增益裕度不低於6dB,實際上6dB可能也會共振,一般我們取8dB或者10dB,可以取得比較好的效果。

圖6-10
整個系統要想穩定,就得同時滿足增益穿越點的相位裕度不低於30°,和相位穿越點的增益裕度大於10dB,我們調試參數的目的就是為了讓這些點能滿足要求。知道了系統穩定的標準後,就看看怎樣調試參數,其實也比較簡單。參數設置介面如下圖6-11所示,在Design模式就可以修改參數。
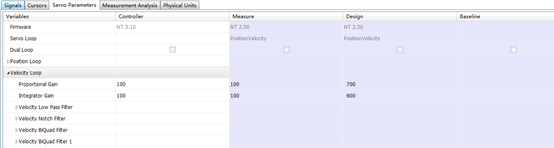
圖6-11
參數大致分為環路增益參數和濾波器參數,環路增益有位置環和速度環,位置環增益對整個系統響應速度的影響比較小,一般是把系統頻寬作為位置環比例增益填入。最核心的還是速度環的參數,速度環不僅有比例–積分增益,還有幾個濾波器,比例–積分和我們時域理解的是一樣,增益越大則系統響應速度越快。圖6-10中紅色的曲線是沒有修改參數時候的情況,頻寬大概30多Hz,紅色上方的土黃色曲線是增加了速度環和位置環增益後的,可以明顯看到系統的頻寬大幅增加到90多Hz,這就是環路增益對系統頻寬或者叫動態性能的影響。環路增益是基本的參數調試,對於比較好的機械系統調試這幾個參數就夠了,比如我現給出的波特圖就是一個剛度非常好的機械系統,比較接近理想的波特圖曲線。理想的波特圖曲線走勢,就是隨著頻率的增加,系統對激勵訊號的放大倍數越來越小,中頻段比較寬,整個曲線無共振點,共振點就是突出的尖峰,則認為是比較理想的狀況,我們調試的時候也是儘可能的將曲線往這個趨勢校正。
速度環還有幾個比較重要的濾波器,低通濾波器、陷波濾波器、雙極濾波器。低通濾波器就是允許低頻訊號通過,阻止高頻訊號,機械系統越好的情況下低通濾波器頻率範圍就越寬,能調試的空間也就越大。陷波濾波器是一個帶阻濾波器,某一個頻率範圍的訊號不允許通過,高於或者低於這個頻率的都可以通過,可以認為是陷阱的意思,讓一個頻率範圍的訊號掉入陷阱而不能通過。陷波濾波器都抑制共振點非常有用,一般共振點都是一個很窄的頻率範圍的尖峰,陷波濾波器可以設置陷波的頻率點,陷波的頻率寬度,陷波的幅度,也就是幅值上要衰減多少。
雙極濾波器一般接觸比較少,也不要被這個名字給嚇住,不要怕,記住它也就是一個濾波器,只不過參數多點而已。雙極濾波器的雙極指的就是有兩個零點和兩個極點,其傳遞函數如下6-3公式
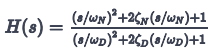
公式6-3
實際使用過程中我們不需要關心為什麼叫雙極濾波器,我們關心這個雙極濾波器能實現什麼功能,怎樣使用就可以了。雙極濾波器可以實現陷波濾波器、低通濾波器、超前校正和滯後校正功能,用的最多的就是陷波和低通濾波功能。圖6-12為配置成陷波濾波器的效果,參數配置為WN=WD,分子的阻尼係數小於分母的阻尼係數。

圖6-12
圖6-13是配置為低通濾波器,參數配置為WN>WD。雙極濾波器的參數就這個幾個,還可以組成超前或者滯後校正來增加相位裕度或者增益裕度,一般用的比較少。
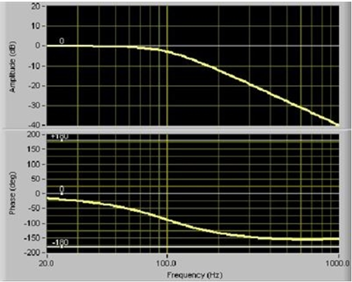
圖6-13
6.4總結
無論是用時域方法還是頻率域調試方法,調試的目的都是為了追求一個穩定而且高效的系統。穩定指的是系統無論在哪個位置點,無論是今天還是明天,它都是可靠且結果一致的;高效指的是完成同樣一件事情,花費的時間儘可能的短,更高的產出率。時域的調試方法直觀明了,非常常見,易於上手。頻率域的調試方法相比之下更難理解,尤其對自動控制原理和訊號與系統沒有概念的初學者。但只要你理解了波特圖的含義,知曉波特圖對系統穩定判斷的標準,那麼頻率域的調試將會非常容易且有趣。簡單說就是增益穿越點的相位裕度不低於30°,相位穿越點的增益裕度不低於10dB,這樣就可以了。通過增加環路增益可以讓系統的頻寬更大,對於不滿足要求的共振點使用濾波器過濾,其實調試也就這麼多事,調的多了自然也就會了。根據我的經驗,頻率域調試方法除了可以分析頻率特性外,還有一個好處是調試的一致性很好,只要波特圖差不多,系統的結果基本一樣,無論是精度,穩定性,整定時間等。
參考文獻
1.《EtherCAT工業乙太網應用技術》機械工業出版社,李正軍
2.《CAN匯流排應用層協議實例解析(第2版)》北京航空航天大學出版社,牛躍聽,周立功,高宏偉,黃敏思
3.《運動控制系統(第2版)》中國工信出版社,班華,李長友
4.《自動控制原理(第6版)》科學出版社,胡壽松
5. maxon選型手冊18,19,20,21版
6. ACS相關手冊


