基於預計算的全局光照(Global Illumination Based On Precomputation)
基於影像的光照(Image Based Lighting,IBL)
基於影像的光照(IBL),簡單的說就是一類通過 環境貼圖(Environment Map) 來保存某個物體的環境光資訊,從而實現該物體的基於物理的物體渲染方法。
-
IBL 可用於 diffuse/glossy/specular 物體(基本上包含大部分物體了)渲染:這取決於環境貼圖,環境貼圖解析度越大,那麼所能表示高頻資訊就越多,從而越適合 specular 物體的渲染;而解析度越低,所表示的資訊更多是低頻資訊,則 diffuse 物體的渲染也足以滿足,而且還能節省一定存儲空間。
-
IBL 可以實現成動態環境光照:實時渲染出動態的環境貼圖。有一定開銷,一般只用於少量的specular物體。
-
IBL 可以實現成靜態環境光照:預渲染環境貼圖。需要環境光是靜態的。
用 IBL 實現靜態環境光照就有點類似 Light Map的做法了,區別在於 IBL 存的是靜態環境光資訊,Light Map 存的是接受靜態環境光資訊後的著色結果。
為了表示來自四面八方的環境光資訊,IBL 使用 Spherical Map 或者 Cube Map 的方式來存儲:


The Split Sum Approximation
IBL 中最常見的演算法便是基於 The Split Sum Approximation 的演算法。
我們知道,一般的渲染方程如下:
\(L_{r}\left(x, \omega_{r}\right)=\int_{\Omega^{+}} L_{i}\left(x, \omega_{i}\right) f_{r}\left(x, \omega_{i}, \omega_{r}\right)\left(n \cdot \omega_{i}\right) \mathrm{d} \omega_{i}\)

在實際渲染的時候,我們當然可以使用蒙特卡洛方法實現該渲染方程,然而這樣的開銷是巨大的(每個shading point都要做多重取樣,而且結果很容易是noisy的)。
為了進一步加快式子,這裡有一個很經典的近似公式:
\(\int_{\Omega^+} f(x) g(x) \mathrm{d} x \approx \frac{\int_{\Omega_{G}} f(x) \mathrm{d} x}{\int_{\Omega_{G}} \mathrm{~d} x} \cdot \int_{\Omega^+} g(x) \mathrm{d} x\)
積分域 \(\Omega_G\) :在原本 \(\Omega^+\) 的積分域範圍內剔除掉 \(f(x) = 0\) 的地方而剩餘的範圍。
想讓這個公式近似效果比較精確,那麼需要滿足以下一種或兩種條件:
- 積分域 \(\Omega_G\) 比較小
- \(g(x)\) 比較光滑,即變化不是很大
而我們的觀察是:
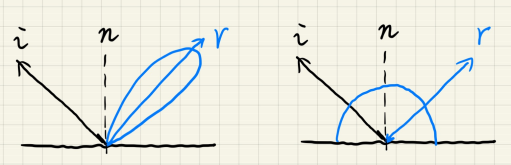
- 如果 BRDF 是 glossy/specular 的,那麼它的 lobe 往往是花瓣狀,即只有很小的積分域才能接受環境光。
- 如果 BRDF 是 diffuse 的,那麼它的 lobe 往往是均勻的半球狀,即無論哪個方向的環境光打進來, \(f_r\) 函數的輸出幾乎沒多少變化(甚至是個常數)。
於是基於以上理論,Split Sum 方法對渲染方程改造成這樣的近似公式來獲得渲染的加速:
\(L_{r}\left(x, \omega_{r}\right) \approx \frac{\int_{\Omega_{f_{r}}} L_{i}\left(x, \omega_{i}\right) \mathrm{d} \omega_{i}}{\int_{\Omega_{f_{r}}} \mathrm{~d} \omega_{i}} \cdot \int_{\Omega^{+}} f_{r}\left(x, \omega_{i}, \omega_{r}\right) \cos \theta_{i} \mathrm{~d} \omega_{i}\)
對渲染方程拆分成兩個部分(環境光積分、BRDF積分)後就可以通過預計算的方式(後面兩節會介紹如何預計算)分別減少這些積分的運行時開銷,總結這種方法的好處是:
- Split Sum 方法和原始蒙特卡洛方法的影像效果幾乎一模一樣
- 由於不用對環境貼圖進行多重取樣,性能開銷大大減低了
過濾環境貼圖
環境光積分:\(\frac{\int_{\Omega_{f_{r}}} L_{i}\left(x, \omega_{i}\right) \mathrm{d} \omega_{i}}{\int_{\Omega_{f_{r}}} \mathrm{~d} \omega_{i}}\)
因為我們已經擁有一張環境貼圖(無論是實時的還是預渲染的)來存儲環境光資訊了,為了計算環境光部分的積分,需要在 \(\Omega_{fr}\) 範圍內做多次光線取樣。但是,可以有一個幾乎等價但避免運行時多重取樣的方式:
預先對紋理進行濾波操作(模糊),我們只需要對濾波後的環境貼圖取樣一次光線方向就能得到積分。
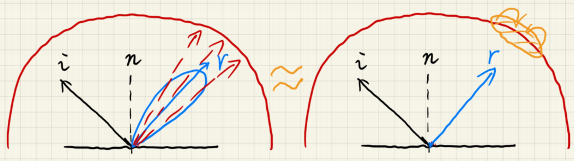
濾波後的環境貼圖實際上稱為 Irradiance Environment Map :原來環境貼圖中的單位是 radiance \(L(\mathrm{x}, \omega)\),貼圖積分後的單位則變成了 Irradiance \(E(x)\)。
當然,BRDF Lobe 的形狀越尖銳,即環境光積分範圍越小,就需要使用模糊程度更低的環境貼圖;反之 BRDF Lobe 的形狀越粗壯,即環境光積分範圍越大,就需要使用模糊程度更高的環境貼圖。
我們可以使用 MIPMAP技術 來生成不同Level的環境貼圖,通過三線性插值(Trilinear Interportion)的方式來得出任何模糊程度且任何2D位置的環境光濾波結果。
預計算BRDF積分
回顧 Microfacet BRDF 的組成:
- Fresnel項(舉例 Schlick’s approximation)
$F=F_0 +(1-F_0)(1-(h \cdot \omega_{r}))^{5} = F_0 +(1-F_0)(1-(\cos\theta_{vh}))^{5} $
- NDF項(舉例 Beckmann NDF)
\(D(h)=\frac{1}{\pi \alpha^{2}({n} \cdot {h})^{4}} \cdot \exp {\left(\frac{({n} \cdot {h})^{2}-1}{a^{2}({n} \cdot {h})^{2}}\right)} = \frac{1}{\pi \alpha^{2}\cos^4 \theta_h } \cdot \exp {\left(\frac{\cos^2 \theta_h -1}{a^{2}\cos^2 \theta_h }\right)}\)
可以預想到,該BRDF 的積分結果依賴於三個參數:
- \(F_0\)(Fresnel項係數)
- \(\alpha\) (粗糙度 roughness)
- \(\theta_v\) (反射方向與法線的夾角,實際上決定了 \(\theta_{vh}\)、\(\theta_{h}\))
我們可以把 \(F_0\) 項拆出來,讓BRDF 積分拆成兩個積分,但是這些積分都減少了一個依賴的參數:
\(\begin{align} \int_{\Omega^{+}} f_{r}\left(p, \omega_{i}, \omega_{o}\right) \cos \theta_{i} \mathrm{~d} \omega_{i} \approx & F_{0} \int_{\Omega^{+}} \frac{f_{r}}{F}\left(1-\left(1-\cos \theta_{vh}\right)^{5}\right) \cos \theta_{i} \mathrm{~d} \omega_{i} \\ & + \int_{\Omega^{+}} \frac{f_{r}}{F}\left(1-\cos \theta_{vh}\right)^{5} \cos \theta_{i} \mathrm{~d} \omega_{i} \end{align}\)
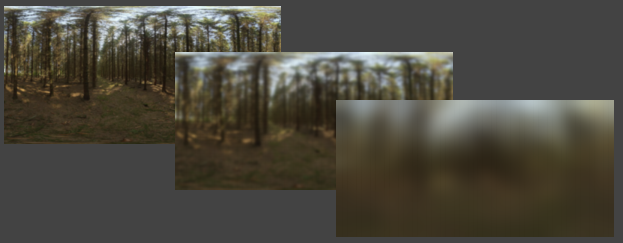
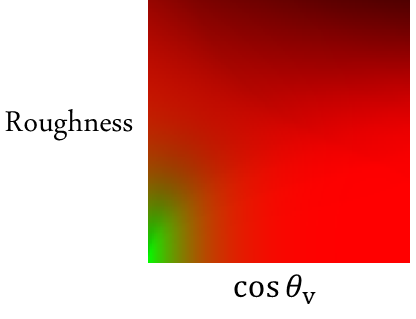
這樣,對於相同的材質(相同的BRDF),我們就可以針對剩餘兩個依賴的參數 \(\alpha\) 、\(\theta_v\) 建立一張 二維查詢表:
預計算輻射度傳輸(Precomputed Radiance Transfer,PRT)
預計算輻射度傳輸(Precomputed Radiance Transfer,PRT) 是一類通過預計算輻射度傳輸的基於物理的物體渲染方法。所謂輻射度傳輸,可以理解成物體自身的陰影/AO(AmbientOcclusion)和表面互反射等有關於光路傳輸的資訊。因此 PRT 往往適用於動態光照下的靜態物體/靜態材質。
- PRT 可以實現動態環境光照:僅預計算 transfer 部分
- PRT 可以實現靜態環境光照:不僅預計算 transfer,還順便預計算環境光部分(可以稱為 radiance);這樣就能以更低性能開銷實現運行時基於物理的渲染,只是光照動態性會有所限制(甚至得完全靜態光照)。
順便一提,PRT 方法在2002年 Siggraph 會議被 Peter-Pike Sloan 首先提出,並從此掀起了一波 PRT 方法的研究浪潮。當時 Peter-Pike Sloan 論文所實現的 PRT 演算法便是基於球諧(SH)的,實際上 PRT 不僅可以通過 SH 去表示低頻環境光場景,還可以有其它方法(如Wavelet)。不過本文仍將主要介紹球諧光照(SH Lighting)方法。
球諧(Spherical Harmonics,SH)
對於任意函數 \(f(x)\) ,不管是連續的還是不連續的,我們可以展開成一系列基函數(每項都帶某個係數)的線性組合:
\(f(x)=\sum_{i} c_{i} \cdot B_{i}(x)\)
例如,多項式展開可以看成是一系列基函數(多項式)的線性組合:\(f(x)=c_{0} +c_1\cdot x^1 + c_2 \cdot x^2 + …\)
再例如,傅立葉變換也可以將 \(f(x)\) 表示成另一系列基函數(各種頻率的正弦諧波)的線性組合:


而 球諧(Spherical Harmonics,SH)便是定義在球面上的一系列2D基函數,它與2D傅里葉序列有點相似,但非常適合球面函數 \(f(\omega)\)(即參數為單位球面向量)。
SH 是分階數的:在第0階(l=0)有1個基函數(m=0);第1階(l=1)有3個基函數(m=-1,0,1)…第n階(l=n)有2n+1個基函數(m=-l,…,0,…,l)。實際上,階數越低的基函數所代表的資訊就越是低頻。如果要完全復原一個任意函數,我們需要無窮階的 SH;而如果我們只要復原一個任意函數的近似(換句話說只重建出該函數的低頻資訊),那麼我們完全可以只需要前幾階的 SH(包含 l=0,l=1,…,l=n 每一階的所有基函數)。
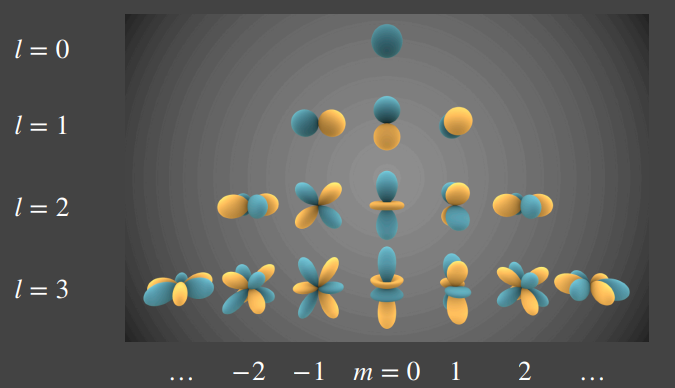
SH 的實數形式的基函數如下:
SH 基函數的形式比較複雜,只建議看一眼就跳過。
\(y_{l}^{m}(\theta, \varphi)=\left\{\begin{array}{rl}\sqrt{2} \operatorname{Re}\left(Y_{l}^{m}\right) & m>0 \\ \sqrt{2} \operatorname{Im}\left(Y_{l}^{m}\right) & m<0 \\ Y_{l}^{0} & m=0\end{array}=\left\{\begin{array}{cc}\sqrt{2} K_{l}^{m} \cos m \varphi P_{l}^{m}(\cos \theta) & m>0 \\ \sqrt{2} K_{l}^{m} \sin |m| \varphi P_{l}^{|m|}(\cos \theta) & m<0 \\ K_{l}^{0} P_{l}^{0}(\cos \theta) & m=0\end{array}\right.\right.\)
其中,
\(K_{l}^{m}=\sqrt{\frac{(2 l+1)(l-|m|) !}{4 \pi(l+|m|) !}}\)
\(p^m_l\) 為勒讓德多項式(Legendre polynomials):
- $P_0^0= 1 $
- $P_{m}^{m} =(1-2 m) P_{m-1}^{m-1} $
- $P_{m+1}^{m} =(2 m+1) z P_{m}^{m} $
- $ P_{l}^{m} =\frac{(2 l-1) z P_{l-1}^{m}-(l+m-1) P_{l-2}^{m}}{l-m} $
z為球面向量對應球面坐標的z值,該多項式不依賴x值y值。
以下是前3階的SH實數形式的基函數:
\(l=0\):
- \(Y_{00}=s=Y_{0}^{0}=\frac{1}{2} \sqrt{\frac{1}{\pi}}\)
\(l=1\):
- \(Y_{1,-1}=p_{y}=i \sqrt{\frac{1}{2}}\left(Y_{1}^{-1}+Y_{1}^{1}\right)=\sqrt{\frac{3}{4 \pi}} \cdot \frac{y}{r}\)
- \(Y_{1,0}=p_{z}=Y_{1}^{0}=\sqrt{\frac{3}{4 \pi}} \cdot \frac{z}{r}\)
- \(Y_{1,1}=p_{x}=\sqrt{\frac{1}{2}}\left(Y_{1}^{-1}-Y_{1}^{1}\right)=\sqrt{\frac{3}{4 \pi}} \cdot \frac{x}{r}\)
\(l=2\):
- \(Y_{2,-2}=d_{x y}=i \sqrt{\frac{1}{2}}\left(Y_{2}^{-2}-Y_{2}^{2}\right)=\frac{1}{2} \sqrt{\frac{15}{\pi}} \cdot \frac{x y}{r^{2}}\)
- \(Y_{2,-1}=d_{y z}=i \sqrt{\frac{1}{2}}\left(Y_{2}^{-1}+Y_{2}^{1}\right)=\frac{1}{2} \sqrt{\frac{15}{\pi}} \cdot \frac{y z}{r^{2}}\)
- \(Y_{2,0}=d_{z^{2}}=Y_{2}^{0}=\frac{1}{4} \sqrt{\frac{5}{\pi}} \cdot \frac{-x^{2}-y^{2}+2 z^{2}}{r^{2}}\)
- \(Y_{2,1}=d_{s z}=\sqrt{\frac{1}{2}}\left(Y_{2}^{-1}-Y_{2}^{1}\right)=\frac{1}{2} \sqrt{\frac{15}{\pi}} \cdot \frac{z x}{r^{2}}\)
- \(Y_{2,2}=d_{x^{2}-y^{2}}=\sqrt{\frac{1}{2}}\left(Y_{2}^{-2}+Y_{2}^{2}\right)=\frac{1}{4} \sqrt{\frac{15}{\pi}} \cdot \frac{x^{2}-y^{2}}{r^{2}}\)
SH 與一般的基函數相比,具有以下性質:
- 基函數之間具有正交性(orthonormal)
\(\int_{\Omega} B_{i}(\omega) \cdot B_{j}(\omega) \mathrm{d} \omega=\mathbf{1} \quad(i=j)\)
\(\int_{\Omega} B_{i}(\omega) \cdot B_{j}(\omega) \mathrm{d} \omega=\mathbf{0} \quad(i\neq j)\)
- 通過 投影(Projection)可以很方便得到 SH 係數(SH coefficients)
\(f_i = \int_{\Omega}f(\omega)\cdot B_i(\omega)d\omega\)
- 通過係數向量組與基函數組的點積(前n階的基函數/係數共有 n*n 個)可以很方便重建球面函數
\(f(\omega)\approx \sum^{n^2}_{i=1} f_{i} B_{i}(\mathbf{\omega})\)
- product projection:\(c(\omega)=a(\omega)b(\omega)\) ,已知 \(a\) 的形式而 \(b\) 未知,有
\(\vec{c} = M\cdot \vec b\)
其中,\(\vec{c}\) 為 \(c(\omega)\) 的SH係數向量組,\(\vec{b}\) 為 \(b(\omega)\) 的SH係數向量組,\(M\) 為 \(n^2\) X \(n^2\) 的矩陣,其元素為
\(M_{ij}=\int_{\Omega}a(\omega)B_i(\omega)B_j(\omega)d\omega\)
這樣我們就可以預計算好 \(M\) ,等到知道 \(\vec{b}\) 後,乘起來就能得到 \(\vec{c}\)
推導:
令 \(M_{i}(\omega)=a(\omega)B_i(\omega)\)
\(\begin{align} c_i &= \int_{\Omega} a(\omega)b(\omega)B_i(\omega) d\omega \\ &= \int_{\Omega} M_i(\omega)b(\omega)d\omega \\ &= \int_{\Omega} \sum_{j=1}^{n^2} (M_{ij} B_j(\omega)) b(\omega) d \omega \\ &= \sum_{i=1}^{n^2} M_{ij} \int_{\Omega} B_j(\omega)b(\omega) d \omega \\ &= \sum_{j=1}^{n^2} M_{ij}\cdot b_j \end{align}\)
-
支援插值,對 SH 係數的插值相當於對重建的函數值的插值。
-
旋轉不變性(rotational invariance),對函數 \(f\) 的旋轉 \(R_{SH}\) 等價於對 \(f(\omega)\) 的自變數的旋轉 \(R_{3D}\):
\(R_{SH}(f(\omega))=f(R_{3D}(\omega))\)
球諧光照(Spherical Harmonic Lighting)
紋理本質上也是一個函數(訊號),輸入二維坐標,輸出對應紋素的RGBA值。傳統的環境光資訊往往使用環境貼圖(Environment Map)表示,這往往需要一個龐大的二維數組存儲各個紋素的值,十分耗費空間,而且取樣和紋理I/O也有一定開銷。
球諧光照(SH Lighting) 的思路:將渲染方程分為兩個球面函數(即 lighting function 和 transfer function),這些球面函數將使用 SH 方法來表示:
- 對於環境光(lighting)部分,只需預先存儲若干個 SH 係數而不必存儲一整張環境貼圖。
- 對於傳輸函數(transfer function) 部分,只需預先存儲若干個 SH 係數(diffuse情況下)或者矩陣(glossy情況下),預計算好傳輸率可以在實時渲染中以極低代價實現自陰影、互反射的效果。
不過 SH Lighting 一般採用3階SH,因此 SH 所能表示的 lighting 和 transfer 資訊是低頻的,只適用於 diffuse 和 glossy 的物體而不適用於 specular 的物體。
球諧光照(Spherical Harmonic Lighting)效果:
圖分別為:diffuse物體的unshadowed效果、diffuse物體的shadowed&interreflection效果、glossy物體的unshadowed效果、glossy物體的shadowed&interreflection效果

Diffuse 物體的球諧光照
物體的渲染方程:
\(L(r)=\int_{\Omega^+} L(\mathbf{\omega})\cdot \rho \cdot V(\mathbf{\omega}) \max (0, n\cdot \mathbf{\omega}) \mathrm{d} \mathbf{\omega}\)
其中,\(\rho\) 為 BRDF 項;\(V\) 為 Visibility,表示不被遮擋的程度,往往表現為自遮擋產生的陰影現象。
- 由於物體是 diffuse 的,因此它的 BRDF 將是一個常數 \(\rho\) (無論從哪個方向觀察都得到相同的BRDF值)
- 對於 lighting 部分 \(L(\mathbf{\omega})\),原本需要對 Environment Map 進行查詢,而現在可以換成使用 SH 函數去表示:\(L(\mathbf{\omega}) \approx \sum l_{i} B_{i}(\mathbf{\omega})\)
- 對於 transfer function 部分 \(T(\omega)=V(\mathbf{\omega}) \max (0, n\cdot \mathbf{\omega})\) , 也可以換成使用 SH 函數去表示:\(T(\omega) \approx \sum T_j B_j(\omega)\)
代入渲染方程整理後得:
\(\begin{align} L(r) &\approx \frac{\rho}{\pi} \int_{\Omega^+} \sum_{i=1}^{n^2}l_{i}B_i(\omega) \sum_{j=1}^{n^2}T_j\mathrm{B}_{j}(\mathbf{\omega}) \mathrm{d} \mathbf{\omega} \\ &= \frac{\rho}{\pi}\sum_{i=1}^{n^2} \sum_{j=1}^{n^2} l_{i}T_j\int_{\Omega^+} B_i(\omega) \mathrm{B}_{j}(\mathbf{\omega})d\omega \\ &= \frac{\rho}{\pi}\sum_{i=1}^{n^2} l_{i}T_i\int_{\Omega^+} B_i(\omega) \mathrm{B}_{i}(\mathbf{\omega})d\omega \\ &= \frac{\rho}{\pi}\sum_{i=1}^{n^2} l_{i}T_i \end{align}\)
這樣,我們只需要預計算出 \(l_i\) 和 \(T_i\),就能讓運行時的diffuse物體渲染速度大大提升。
預計算過程,對物體模型的每個頂點:
-
預計算 lighting 的 SH 係數向量組 \(\vec{l}\),其中一個元素為:\(l_{i}=\int_{\Omega^+} L(\mathbf{\omega}) B_{i}(\mathbf{\omega}) \mathrm{d} \mathbf{\omega}\)
-
預計算 light transfer 的 SH 係數向量組 \(\vec{T}\),其中一個元素為:\(T_i=\int_{\Omega^{+}}V(\mathbf{\omega}) \max (0, n\cdot \mathbf{\omega}) \mathrm{B}_{i}(\mathbf{\omega}) \mathrm{d} \mathbf{\omega}\)
此時,我們可以理解成係數 \(l_i\) 代表了環境光照(lighting)的資訊,而係數 \(T_i\) 代表了光路傳輸(light transfer)的資訊
運行時渲染過程:
-
在 vertex shding 階段計算頂點的 SH 顏色 \(L(r) \approx \frac{\rho}{\pi} \sum_{i=1}^{n^2} l_{i} T_{i} = \frac{\rho}{\pi}( \vec{l}\cdot \vec{T})\)
-
在 pixel/fragment shading 階段得到插值後的 SH 顏色即為該像素的顏色

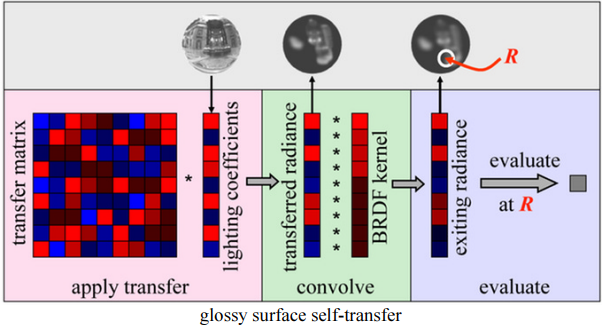
Glossy 物體的球諧光照
物體的渲染方程:
\(L(r)=\int_{\Omega^+} L(\mathbf{\omega})\cdot \rho(r,\mathbf{\omega}) \cdot V(\mathbf{\omega}) \cdot \max (0, n\cdot \mathbf{\omega}) \mathrm{d} \mathbf{\omega}\)
對於 glossy 物體,不同視角觀察物體表面同一點會有不同的光照。因此 glossy 的 BRDF 將是四維的函數(參數不僅包含\(\mathbf{\omega}\),還包含\(r\)),這次將 BRDF 算入 transfer,則 transfer function 將額外增加一個二維參數 \(r\)
- 對於環境光(lighting)即 \(L(\mathbf{\omega})\),原本需要對 Environment Map 進行查詢,而現在可以換成使用 SH 函數去表示:\(L(\mathbf{\omega}) \approx \sum l_{i} B_{i}(\mathbf{\omega})\)
- 對於傳輸函數(transfer function) \(T(r,\omega)=\rho(r,\mathbf{\omega}) V(\mathbf{\omega}) \max (0, n\cdot \mathbf{\omega})\) ,換成使用 SH 函數去表示:\(T(r,\omega) \approx \sum_{i=1}^{n^2} T_{i}(r)B_i(\omega)\approx \sum_{i=1}^{n^2} \sum_{j=1}^{n^2} T_{ij} B_j(r)B_i(\omega)\)
由於額外多了一個二維的參數,transfer 係數將是一個矩陣而非之前 diffuse 情況下的係數向量。
代入渲染方程整理後得:
\(\begin{align} L(r) & \approx \int_{\Omega^+} \sum_{i=1}^{n^2} l_{i} B_{i}\sum_{j=1}^{n^2}\sum_{k=1}^{n^2} T_{jk} B_j(\omega)B_k(r)\mathrm{d} \mathbf{\omega} \\ &= \sum_{i=1}^{n^2}\sum_{j=1}^{n^2}\sum_{k=1}^{n^2} l_iT_{jk }B_k(r) \int_{\Omega^+} B_{i}(\omega)B_j(\omega)\mathrm{d} \mathbf{\omega} \\ &= \sum_{i=1}^{n^2}\sum_{k=1}^{n^2}l_iT_{ik }B_k(r) \end{align}\)
預計算過程,對物體模型的每個頂點:
-
預計算 lighting 的 SH 係數向量組 \(\vec{l}\),其中一個元素為:\(l_{i}=\int_{\Omega^+} L(\mathbf{\omega}) \cdot B_{i}(\mathbf{\omega}) \mathrm{d} \mathbf{\omega}\)
-
預計算 light transfer 矩陣 \(T\),其中一個元素為:\(T_{ij}=\int_{\Omega^{+}}\mathrm{B}_{j}(\mathbf{\omega}) T_i(\omega) \mathrm{d} \mathbf{\omega}\)
運行時渲染過程:
- 在 vertex shding 階段計算頂點的 SH 顏色 \(L(r) \approx \sum_{i=1}^{n^2}\sum_{j=1}^{n^2} l_{i} T_{ij} B_j(r) = T\vec{l}\cdot \vec{B(r)}\)
- 在 pixel/fragment shading 階段得到插值後的 SH 顏色即為該像素的顏色
球諧光照預計算 Transfer
PRT 的 SH Lighting 預計算是針對單個模型物體的預計算,即輸入一個 模型物體 + Environment Map,然後輸出模型中每個頂點的 Lighting SH 係數和 Transfer SH 係數或矩陣。這樣也意味著這種 GI 方式的 Transfer 只考慮了模型自身的幾何遮蔽關係,並不會考慮其它物體。
TODO
球諧函數的旋轉(SH Rotation)
PRT 的一個問題是如果 lighting 部分是預計算的,那就只適用於靜態環境光下的靜態物體渲染;環境光或者物體只要有變化,PRT 就不得不進行重新預計算;但得益於 SH 的旋轉不變性,我們至少可以讓 SH Lighting 適用於動態旋轉的情形而不必重新預計算。
環境光旋轉往往用來實現場景的晝夜輪轉效果,物體旋轉就比較常見了。順便註:環境光旋轉和物體旋轉在 PRT 渲染中是等價的(只是說看相對於哪個東西來看待旋轉而已)
現在給定旋轉 \(R\) ,然後有SH投影函數 \(P\)(輸入一個球面向量,輸出第 \(l\) 層band的 SH 係數向量組)。假設我們有 \(2l+1\) 個任意的球面向量,我們需要想辦法求出能等價於旋轉 \(n_i\) 的矩陣 \(M\) 來旋轉 SH投影函數 \(P\) :
\(M P\left(n_{i}\right)=P\left(R\left(n_{i}\right)\right), i \in[-l, l]\)
整理得:
\(M\left[P\left(n_{-l}\right), \ldots, P\left(n_{l}\right)\right]=\left[P\left(R\left(n_{-l}\right)\right), \ldots, P\left(R\left(n_{l}\right)\right)\right]\)
記 \(A = [P_{(n−l)}, …, P (n_{l})]\) ,如果矩陣 \(A\) 是可逆的,則:
\(M=\left[P\left(R\left(n_{-l}\right)\right), \ldots, P\left(R\left(n_{l}\right)\right)\right] A^{-1}\)
這樣,無論 \(R\) 怎麼變化,我們都可以即時根據 \(R\) 求出 \(M\) ,然後把最新的 \(M\) 應用到所有預計算好的 \(P(\omega)\) 上(即預計算好的SH係數上),而不必重新預計算 \(P(R(\omega))\) 。
SH 的快速旋轉實現:
對於第 \(l\) 層 band 需要做如下處理:
- 選取共 \(2l + 1\) 個 單位向量 \(n_i\),這些向量 \(n_i\) 投影在該層 band 上的基函數就能得到係數 \(P (n_i)\)。共 \(2l + 1\) 個 \(2l+1\) 維向量 \(P (n_i)\) 構成了矩陣 \(A\),並求出 \(A^{−1}\)
如何選取單位向量:要保證投影后構成的 \(A\) 矩陣可逆。
-
給定旋轉 \(R\) ,對所有 \(n_i\) 依次做旋轉 \(R(n_i)\) ,這些旋轉後的單位向量同樣投影在該層 band 上的基函數就能得到係數 \(P(R(n_i))\)。 共 \(2l + 1\) 個 \(2l + 1\) 維向量 \(P(R(n_i))\) 構成了矩陣 \(S\)
-
求出該層 band 上球諧函數的旋轉矩陣 \(M = SA^{−1}\)
-
用 \(M\) 乘以該層 band 上的 SH 係數向量組就可以得到旋轉後的 SH 係數向量組。
\(l=0\) 時只有1個係數,故不需要處理;\(l=1\) 時需要處理3個係數,其中的 \(A、S、M\) 將會是 3X3矩陣;\(l=2\) 時需要處理5個係數,其中的 \(A、S、M\) 將會是 5X5矩陣……
最後,將每一層 band 的結果重新拼接起來即可得到完整的旋轉後的 SH 係數結果。
// 偽程式碼:三階SH旋轉
SHCoeffientsAfterRotation(Array coeffients,Rotation rotation){
Array res;
// 處理 l = 0
res[0] = coffients[0];
// 處理 l = 1
// step 1
n1 = [1,0,0],n2 = [0,1,0],n3 = [0,0,1];
A = [ // SHProject(n,l,m):向量n投影到SH中l層第m個基函數,輸出對應係數
[SHProject(n1,1,-1),SHProject(n2,1,-1),SHProject(n3,1,-1)],
[SHProject(n1,1,0),SHProject(n2,1,0),SHProject(n3,1,0)],
[SHProject(n1,1,1),SHProject(n2,1,1),SHProject(n3,1,1)]
];
A_inv = InvMatrix(A);
// step 2
rn1 = rotation*n1,rn2 = rotation*n2,rn3 = rotation*n3;
S = [
[SHProject(rn1,1,-1),SHProject(rn2,1,-1),SHProject(rn3,1,-1)],
[SHProject(rn1,1,0),SHProject(rn2,1,0),SHProject(rn3,1,0)],
[SHProject(rn1,1,1),SHProject(rn2,1,1),SHProject(rn3,1,1)]
];
// step 3
M = S*A_inv;
// step 4
coeff_l1 = M*[coeffients[1],coeffients[2],coeffients[3]];
res[1] = coeff_l1[0];
res[2] = coeff_l1[1];
res[3] = coeff_l1[2];
// 處理 l = 2
// step 1
k = 1/sqrt(2);
n1 = [1,0,0],n2 = [0,0,1],n3 = [k,k,0],n4 = [k,0,k],n5 = [0,k,k];
A = [
[SHProject(n1,2,-2),SHProject(n2,2,-2),SHProject(n3,2,-2),SHProject(n4,2,-2),SHProject(n5,2,-2)],
[SHProject(n1,2,-1),SHProject(n2,2,-1),SHProject(n3,2,-1),SHProject(n4,2,-1),SHProject(n5,2,-1)],
[SHProject(n1,2,0),SHProject(n2,2,0),SHProject(n3,2,0),SHProject(n4,2,0),SHProject(n5,2,0)],
[SHProject(n1,2,1),SHProject(n2,2,1),SHProject(n3,2,1),SHProject(n4,2,1),SHProject(n5,2,1)],
[SHProject(n1,2,2),SHProject(n2,2,2),SHProject(n3,2,2),SHProject(n4,2,2),SHProject(n5,2,2)]
];
A_inv = InvMatrix(A);
// step 2
rn1 = rotation*n1,rn2 = rotation*n2,rn3 = rotation*n3,rn4 = rotation*n4,rn5 = rotation*n5;
S = [
[SHProject(rn1,2,-2),SHProject(rn2,2,-2),SHProject(rn3,2,-2),SHProject(rn4,2,-2),SHProject(rn5,2,-2)],
[SHProject(rn1,2,-1),SHProject(rn2,2,-1),SHProject(rn3,2,-1),SHProject(rn4,2,-1),SHProject(rn5,2,-1)],
[SHProject(rn1,2,0),SHProject(rn2,2,0),SHProject(rn3,2,0),SHProject(rn4,2,0),SHProject(rn5,2,0)],
[SHProject(rn1,2,1),SHProject(rn2,2,1),SHProject(rn3,2,1),SHProject(rn4,2,1),SHProject(rn5,2,1)],
[SHProject(rn1,2,2),SHProject(rn2,2,2),SHProject(rn3,2,2),SHProject(rn4,2,2),SHProject(rn5,2,2)]
];
// step 3
M = S*A_inv;
// step 4
coeff_l2 = M*[coeffients[4],coeffients[5],coeffients[6],coeffients[7],coeffients[8]];
res[4] = coeff_l2[0];
res[5] = coeff_l2[1];
res[6] = coeff_l2[2];
res[7] = coeff_l2[3];
res[8] = coeff_l2[4];
return res;
}
這樣我們對 lighting 的 SH 係數做 Rotation,就可以實現支援環境光旋轉或物體旋轉的實時 SH Lighting。
但是注意,不應當對 transfer 的 SH 係數做 Rotation,因為一個物體的 transfer function 只考慮自身的幾何遮蔽(自身與自身的遮蔽關係),而非像物體與環境光那樣存在相對關係。
SH Rotation 效果圖:
光照探針(Light Probe)
光照探針(Light Probe) 是一類場景GI方案。它在場景里設置若干個Probe點(可以理解成向四面八方探測光照的點),為每個 Probe 預計算出環境光資訊後,在運行時通過物體周圍的 Probe 資訊來插值來得到物體此時受到的環境光。
實際上,PRT也算是一種基於Probe的GI方案:PRT物體上的每個頂點都是一個Probe,它所探測的環境光照資訊將預計算為 SH 係數,然後 shading point 可以根據三角形的頂點對 SH 係數做重心插值從而得到該點的 SH 係數(即代表了環境光)。
只是 PRT 的每個三角形頂點都是一個Probe,這些Probe綜合起來完成了單個物體的 GI 效果;而一般的 Light Probe 方案是在場景中每隔一段空間放置一個Probe,這些Probe綜合起來提供了場景中所有物體的 GI 效果。
不過 Light Probe 經常會遇到錯誤的 Bleeding 問題:受到幾何上不應該存在光照關係的 Probe 影響,常見於牆壁遮擋的內外側。
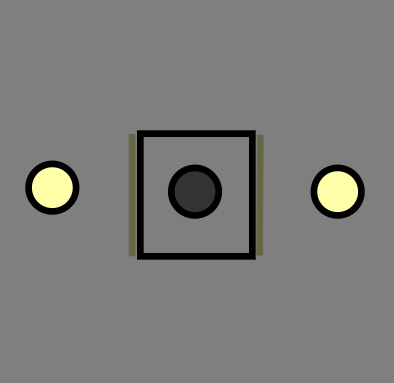
例如,下面的一個 Probe 生成在室內:
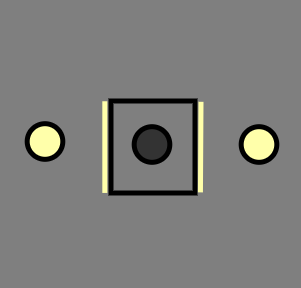
結果由於 Light Probe 方法沒有考慮遮擋,直接且錯誤地進行了對相鄰的 Probe 插值,從而室外本該明亮的一側變暗,室內本該黑暗的一側發生漏光:
因此一個好的 Probe 放置方案可以盡量減少這種 Bleeding 問題。
這裡列舉一些遊戲的做法:
- 《原神》將室內外的 light probe 分開烘焙,使用一個 volume 標記室內區域,室內外區域分別使用對應的 light probe 數據,同時在門口區域,進行過渡處理
- 對馬島之魂:為每個 light probe 設置室內外標記,記錄權重值
。在四面體網格中計算重心坐標時,會傳入一個表示室內外權重的權重值,根據權重值和四面體上四個點的室內外權重值,重新計算出新的重心坐標。
- 使命召喚無盡戰爭:對每個四面體,記錄每個頂點相對面上的遮擋資訊,計算時考慮是否被遮擋。
- 底特律變人:使用 lightmap grid 八叉樹模式保存的light probe,如果遇到在牆兩側的light probe,則進行再次細分,並將取樣光照的位置進行虛擬偏移:
Unity 四面體鑲嵌(Tetrahedral Tessellations)
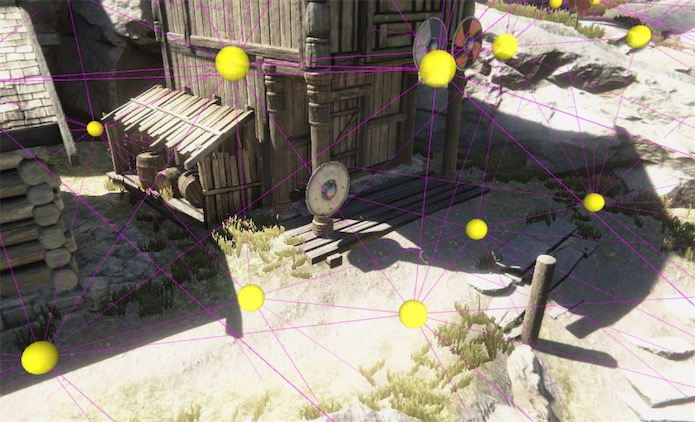
Unity 允許在場景中放置自定義位置的 Probe ,而且這些Probe將相連成一個個四面體。
為了增加這種GI方案的真實感和避免過多的Probe帶來的存儲開銷,還應當把 Probe 在光照發生明顯變化的地方(如明暗交接處)放密集些,而在光照不怎麼變化的地方可以稀疏地放置。
預計算過程:
- 每個 Probe 從自身往四面八方看到的環境光資訊烘焙成3階SH係數(SH Lighting方法)並記錄之
Unity 曾經提供了一種實時GI方案,只不過現在被廢棄了:它的 Probe 是運行時取樣並實時計算出最新的2階 SH 係數。
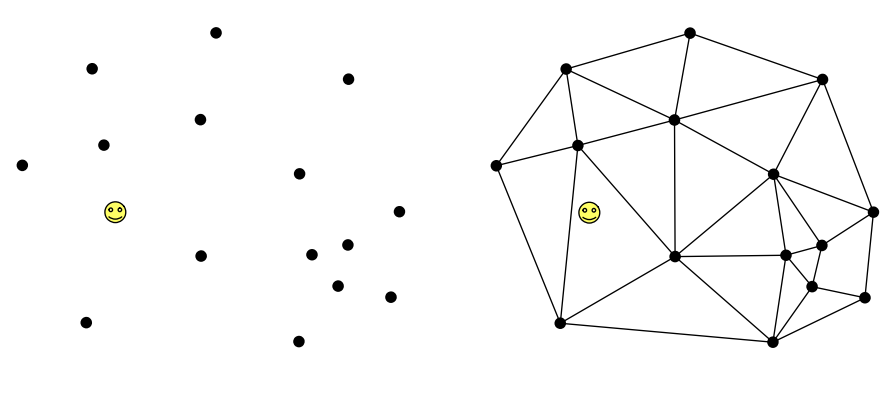
- 將這些 Probe 進行三角化(將空間切分成四面體),切分的演算法是使用Delaunay Triangulation 完美三角剖分。
運行時渲染過程:
- 在渲染物體的 shading point 時,通過四面體插值的方法取周圍4個 Probe 的結果的加權平均作為該點受到的 lighting
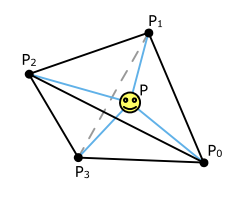
四面體插值:假設 \(a,b,c,d\) 分別為四個 Probe 的權重,則
\(\left[\begin{array}{l}a \\ b \\ c\end{array}\right]=\left[\begin{array}{lll}\vec{P}_{0}-\vec{P}_{3} & \vec{P}_{1}-\vec{P}_{3} & \overrightarrow{P_{2}}-\vec{P}_{3}\end{array}\right]^{-1}\left[\vec{P}-\overrightarrow{P_{3}}\right]\)
\(d=1-a-b-c\)
渲染效果:
Unity Tetrahedral Tessellations 的弊端:
- 運行時,查找所處四面體的CPU運算量較高:四面體的分布並不是均勻的,GPU很難做到查找,所以Unity需要通過CPU把每個使用GI的物體所處的四面體找到並將查找結果傳遞給GPU,這就帶來了性能瓶頸。
UE4 間接光快取(ILC) & 體積光照貼圖(VLM)
間接光快取(Indirect Light Cache):與 Unity Light Probe 方案基本一樣,Probe 也是採用烘焙 SH 係數和插值的方案,只是放置 Probe 的方式有所不同。ILC 基本上是在靜態物體表面法線向上均勻放置 Probe ,這是基於假設受環境光影響最大的地方都是在靠近靜態物體的地方。
當然實際上 ILC 還包含兩種 Probe 放置方式:通過手動放置 Lightmass Importance Volume(重要光照範圍)來限制烘焙光照取樣範圍,或 Lightmass Character Indirect Detail Volume,來增加一段均勻放置 Probe 的區域。
ILC 通過 CPU 尋找物體周圍的 Probe:所有的 Probe 的數據將保存到八叉樹中以方便物體找到周圍的 Probe。

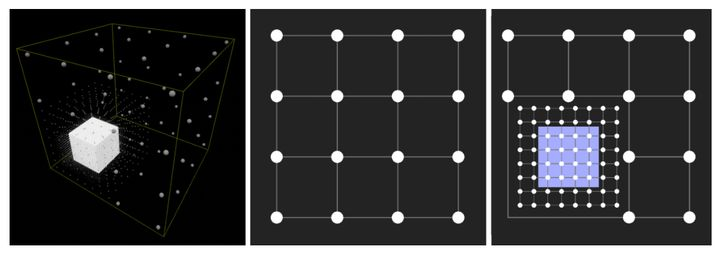
體積光照貼圖(Volumetric Light Map,VLM):還是採用烘焙 SH 係數和插值的方案,也還是放置 Probe 的方式有所不同。VLM 使用網格(Grid)取樣點保存 Probe 數據,在靜態物體表面附近,會對網格進一步細分。
VLM 將通過 GPU 來尋找物體周圍的 Probe :所有 Probe 的數據將烘焙至貼圖中,不同細分層度的網格將使用 level 不同的貼圖,這樣可以方便地在 GPU 中進行逐像素的三線性插值。
VLM 與 ILC 比較:
- VLM 比 ILC 的 Probe 要多更多,從而 VLM 的 GI 效果更佳,但要存儲的數據更多
- VLM 的存儲結構決定了可以通過 GPU 演算法來尋找 Probe,這比傳統的 CPU 演算法性能更加客觀(即是 VLM Probe 數量要多得多)
- VLM 更適合將 Probe 應用到體積霧效果中,這是因為 ILC 往往不在幾乎沒什麼物體的空間放置 Probe
UE 4.18 以後使用 VLM 代替了 ILC 方法作為 UE4 默認的 Light Probe 方案。
UE4 ILC & VLM 效果圖:

光照貼圖(Light Map)
有關 Light Map 的初步介紹可見 實時渲染基礎(4)紋理-光照貼圖
Light Map 結合動態光照
在 UE4 和 Unity 中,靜態物體的全局光照效果都採用了烘焙 Light Map 的方法。
Light Map 方法實際上就是把環境光被分成了靜態部分和動態部分,而 Light Map 記錄的正是受靜態部分環境光後著色結果,因此參與烘焙的物體(位置、形狀、材質)和光照都應當是靜態的,這樣的局限性很大。
為了讓靜態物體也能受到動態部分環境光的影響,將 Light Map 中對應位置的著色資訊解析出來,並與動態光照部分計算出來的著色進行混合。

這裡對Unity、UE4所實現的 Light Map 做一個更深入分析:
- Light Map 一般記錄的是受靜態部分環境光後的著色結果,著色方法不限於Ray Tracing、輻射度、Shadow、環境光遮蔽(Ambient Occlusion,AO)等演算法。
比較有意思的是,對於顏色存儲的方案,Unity採用了直觀的線性顏色存儲方式,而UE4則採用了非線性映射的顏色存儲方式:暗色區域的顏色可以有更多細節(更高精度)而明色區域的顏色則更少細節(更低精度)。這是因為在實際畫面中,我們更容易注意到暗色區域的細節而不容易注意到明亮區域的細節。
-
Light Map 也可以直接混合寫入正常紋理,這樣物體著色只需要取樣一個紋理,但會極度影響紋理的重用(有別的物體使用了相同的紋理,但是光照結果卻是截然不同的;有些著色演算法依賴原生紋理而非混合紋理的數據)
-
Light Map 對於帶 Normal Map 的物體,可能無法得到正確的結果(Normal Map沒有起作用)。這是因為光照烘焙系統只使用了物體的頂點數據(而沒有使用 Normal Map)。而 Unity 和 UE4 的 Light Map 在啟動了高品質選項後會多額外一張紋理(稱為 Directional Light Map )來存儲入射光的主要方向(世界坐標空間):在對某個 shading point 著色時,通過解析出來的入射光主要方向與 shading point 的 normal(Normal Map 解壓出來的,且需變換成世界坐標空間下的)進行點乘,便可以得到對應 Light Map 顏色的貢獻權重。
Lighting Scenarios 實現晝夜天氣系統
Lighting Scenarios :一個物體使用多套 Light Map,常用於模擬天氣系統以及一天中不同時段的光照。實際上,就是烘焙幾個關鍵時間點的 Light Map, 根據時間進行線性插值。
UE4 的 Lighting Scenarios 效果:


總結
GI 總體上分為兩派:一派是通過一套統一標準的渲染流程把任何物體的 GI 計算出來,往往計算量極大但效果更加物理更加真實,典型的例子便是離線光線追蹤;另一派是把 GI 的效果看成一個個部分來組成,這樣我們可以選擇其中一些GI效果組合使用,適應不同的性能(往往計算量相對低些,尤其是實時渲染)的同時也能帶來能接受的 GI 效果(雖然往往不是嚴謹的物理正確),典型的例子就是這篇部落格所介紹的方法和另一些完全動態的 GI 方法(如 SSAO)。
個人歸納:
- IBL 是半動態的 GI 方法(環境光可動可靜、動態物體、材質僅粗糙度參數可變),常用於 Specular 物體的渲染
- PRT 是半動態的 GI 方法(環境光可動可靜、即使靜態環境光還可支援旋轉、物體不可形變、靜態材質), 常用於 Diffuse/Glossy 物體的渲染
- Light Probe 是半動態的 GI 方法(靜態環境光、動態物體), 實時給場景中任何物體提供合適的靜態環境光資訊
- Light Map 是全靜態的 GI 方法(靜態環境光、靜態物體),預先給場景中靜態物體提供受環境光靜態部分影響後的著色結果
參考
- [1] GAMES202-高品質實時渲染-閆令琪
- [2] 《Real-Time Rendering 4th Edition》
- [3] Precomputed Radiance Transfer for Real-Time Rendering in Dynamic, Low-Frequency Lighting Environments
- [4] Stupid Spherical Harmonics (SH) Tricks
- [5] Probe-Based Global Illumination | 知乎
- [6] 遊戲中的全局光照(四) 漫反射GI
- [7] Light probe interpolation using tetrahedral tessellations | GDC2012
- [8] 虛幻引擎學習之路:渲染模組之全局光照明
- [9] UE4 Lightmap的解碼


