面向自動駕駛的高精地圖及數據採集生產體系
前言:又到春招季!作為國民級出行服務平台,高德業務快速發展,大量校招/社招名額開放,歡迎大家投遞簡歷,詳情見文末。為幫助大家更了解高德技術,我們策划了#春招專欄#的系列文章,組織各業務團隊的高年級同學以業務科普+技術應用實踐為主要內容為大家做相關介紹。
本文是#春招專欄#系列的第 2 篇,根據高德高精地圖業務總經理向哲在AT技術講壇分享的《面向自動駕駛的高精地圖及採集生產體系》內容整理而成。在不影響原意的情況下對內容略作刪節。
AT技術講壇(Amap Technology Tribune)是高德發起的一檔技術交流活動,每期圍繞一個主題,我們會邀請阿里集團內外的專家以演講、QA、開放討論的方式,與大家做技術交流。
向哲本次主要分享了兩方面的內容:
1.面向自動駕駛的高精地圖是什麼;
2.當下的高精地圖數據採集生產體系建設現狀和思考。
高精地圖是自動駕駛汽車不可或缺的核心條件,它需要準確表達現實世界各類要素的空間位置和相對關係,因此高精地圖的生產對採集資料的精度要求很高。
工業級的自動駕駛分類
向哲結合自動駕駛在工業級的應用現狀開始講起。

目前工業級自動駕駛大致可以分為兩類,第一類是以特斯拉、小鵬等造車新勢力為用戶生產的具備「輔助駕駛功能」的智慧車為代表。用戶在使用這些自動駕駛功能時,要隨時接管駕駛,駕車過程中出現的法律問題責任主要在人類。
高德和市場上主流的造車新勢力廠商在高精地圖方面有深度合作。以小鵬汽車為例,它的輔助駕駛功能使用了高德所提供的高精地圖能力。目前用戶可以享受到什麼樣的輔助駕駛能力呢?基本已經實現了高速公路上點到點的自動駕駛功能。
比如,從北京開車走高速到廣州,途中會遇到若干段高速的切換,即從一段高速通過匝道換到另一段高速,以及在高速上的變道超車。小鵬汽車的NGP輔助駕駛能力具備了以上兩種能力,基本具備了從北京到廣州的全程自動駕駛功能。
但在行車過程中,司機要隨時盯著路況,在自動換道等時候如果有剮蹭的風險要人工接管駕駛,繼續手動駕駛完成換道。這意味著,駕駛過程中,司機要隨時準備接管駕駛。
另外,在途經收費站的時候,司機也需要手動接管汽車的駕駛,因為目前高精地圖還沒做到收費站里的車道級資訊。在接近收費站的時候,語音助手會提示司機,前方收費站道路沒有高精地圖,需要手動接管駕駛。以上的自動駕駛能力都會應用到小鵬所有P7車型上。
第二類工業級自動駕駛就是典型的L4。例如Google在做的在城市裡自動駕駛的計程車,物流幹線貨車等,跟第一類自動駕駛相比,這類L4自動駕駛理論上在車上是沒有司機的。雖然現在在驗證階段,司機席還有司機。據向哲預測,這類L4無人駕駛計程車要想走進普通人的生活中還要有4~5年的時間。
以上的兩類自動駕駛都強依賴於高精地圖。
高精地圖與自動駕駛
高精地圖是自動駕駛車輛「腦子」里的地圖,能夠讓車輛知道接下來”看不見”的路況是什麼樣的。自動駕駛的四個關鍵功能:感知、高精定位、決策規劃、車輛控制。這裡面至少有三個功能都強依賴於高精地圖。

感知:人類駕駛汽車時要觀察周邊的車道線、交通牌、桿等資訊。智慧車上的感測器會感知道路周邊的物體資訊。高精地圖提供了上帝視角的超視覺感知能力。尤其是在車前方有大貨車等遮擋物導致人眼和感測器無法看清前方車道線等資訊的時候,高精地圖數據可以告知車輛前方道路資訊。
高精定位:自動駕駛的汽車要精確知道車在地圖中的位置,前提就要依靠高精地圖所提供的底圖。自動駕駛的車要知道自己在地圖中的位置,基於兩個能力,一是基於GPS、慣導、千尋等定位能力所提供的絕對位置資訊。絕對位置資訊跟地圖經緯坐標相匹配,可以判定得到車輛在地圖中的具體位置(依賴於感測器進行絕對位置定位的能力)。
但僅有絕對位置定位還不夠,在特殊區域,例如高樓、峽谷等會發生遮擋訊號的時候,絕對定位精度會變差,自動駕駛需要藉助於觀察周圍的車道線、訊號牌、杆子進行的相對定位來輔助,需要跟高精地圖中的地圖數據進行匹配判斷。在實際項目中,高德通過和主流車廠的深度合作,一起來判斷通過哪些技術能獲得更加精準的相對定位能力。
決策規劃:自動駕駛要符合駕駛規則,所以要高度依賴車道線、交通限制設施、紅綠燈等道路元素的。
以上的幾個功能都是彼此支撐關係。
面向自動駕駛的高精地圖
幾個關鍵要素:道路層、車道層、定位對象、動態層。
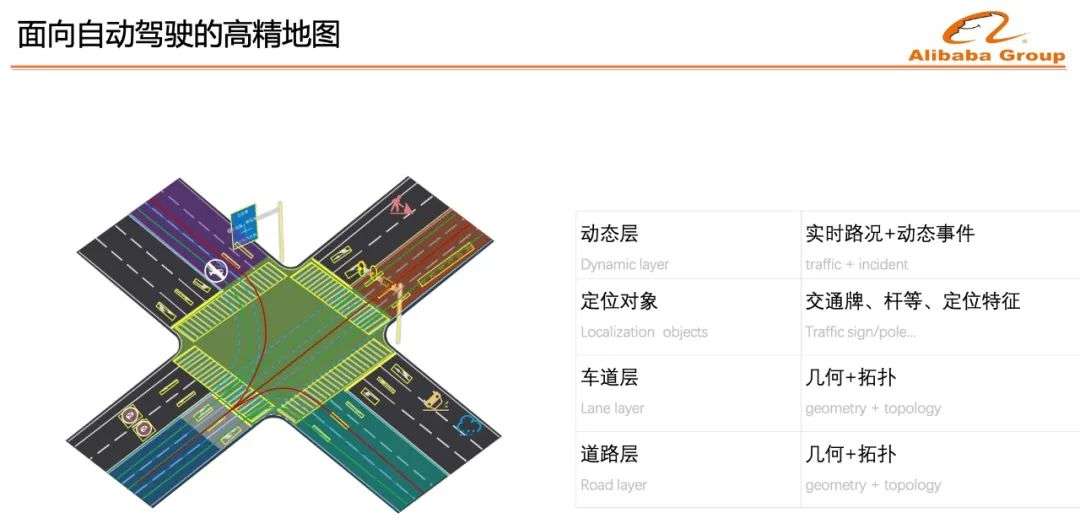
道路層:HD(高精地圖)和SD(普通地圖)的數據是緊密匹配的。目前幾乎所有自動駕駛都是先由用戶告訴智慧系統,我要從某地開往某地,這兩個地點之間的駕駛路線規劃由SD道路數據來支援。HD數據並不孤立,要和SD數據連接。SD數據能力是高德的傳統強項,加上業界領先的HD能力,這種匹配高德一定是業界做的最好的。這也是汽車廠商在選擇地圖服務商時很看重的一點。
車道層:所有的自動駕駛底層的對車輛的控制都依賴於高精地圖數據。
定位對象:高德跟車廠密切合作,車廠基於哪些技術來做相對定位,選擇哪些參考對象,精度做到什麼水平等等,雙方一起溝通聯合研發。
動態層:未來的高精地圖一定會含動態層,實時數據,某條車道在某個時刻發生哪些動態交通事件。
高精地圖在城市普通路的挑戰
目前高德的高精度地圖已經完成了對高速和城市快速路段超30萬公里道路的採集,正在進入穩定的定期更新狀態。相比高速城快,更難的題在城市普通路。
城市高精地圖數據的一個關鍵挑戰在於路口,很多路口的地面缺乏交通線繪製。自動駕駛的汽車在路口間轉向的時候,車輛駛過地面沒有交通線(油漆),這時候就要依賴於高精地圖事先做好的數據。當然,要考慮的當然不只是路口的地面交通線,還要考慮大量其他交通元素。但城市普通路的自動駕駛肯定是地圖服務商和造車新勢力未來會投入很大精力的重要場景。
高精地圖的採集和生成
常規的高精地圖生產可以概括為「採集」、「生產」、「產品化」三個階段。

採集車是由多種先進測量感測器精密集成的移動採集系統,一般會包含Lidar、慣導、相機等設備,根據採集場景不同搭載不同型號的感測器設備。高德高精團隊經過多年深耕,自研了高精採集車系統,具有精度高、速度快、數據產生周期短、自動化程度高、安全性高、資訊全等特點。
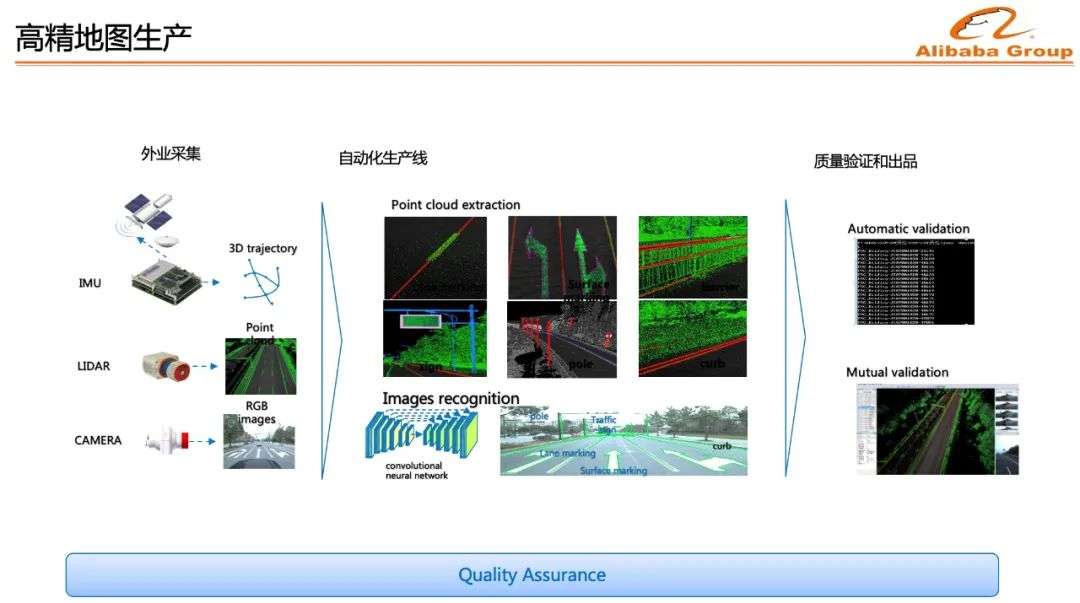
採集設備把外部現實世界裡含精度的數據採集回來以後,還要通過影像識別、精度處理、人工處理等步驟才能「變成」可以用的高精地圖數據。
「鮮」的高精地圖
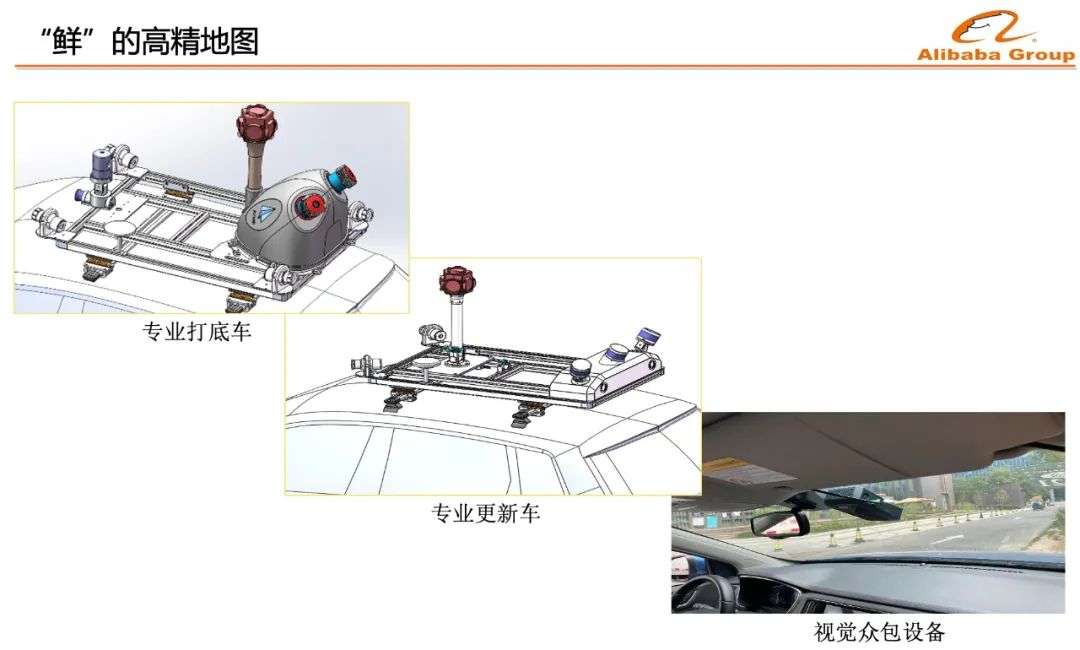
現實生活中的道路數據處在不停的變化之中,如何才能做到「鮮」的高精地圖。
首先,最開始的時候要用成本相對昂貴的專業打底車,在全國道路範圍內測量和採集高精地圖數據。這種採集要同時保證相對精度和絕對精度。然後,用相對廉價的專業更新車來採集路面資訊的局部變化(相對變化)圖識,例如重新刷過地面標識,新豎立的牌、桿等。同時,我們也用更廉價的眾包設備做更快速的採集更新。
為實現對既有數據的快速更新,提升數據數據鮮度。高德的高精團隊,搭建了專業打底車、專業更新車、眾包更新三級能力的採集體系,結合在一起解決精度、鮮度的問題。在真實業務場景里需要在精度和鮮度找到平衡,反覆的迭代。
要解決高精地圖數據的「高精度」、「大規模」、「足夠鮮」等諸多挑戰,需要在很多技術點上進行突破。
比如:如何設計製造不同成本、不同精度、不同部署能力的採集測繪設備;
如何協同不同類設備協同進行採集,同時滿足精度、鮮度上的產品要求;
如何設計和應用演算法,提升採集資料的絕對精度、相對精度,並保證多次採集資料之間彼此對齊嚴絲合縫;
如何綜合應用影像和點雲做好識別,提升生產的自動化水平。
高德高精地圖團隊的同學分別專註在不同方向上,並以開放的心態接受業務挑戰,共同討論和設計方案,也取得了很多成績。
憑藉這份中國精度最高、覆蓋最廣的高精地圖,高德成功拿下了中國外多款主流車廠的商業訂單,開始為智慧駕駛車型提供高精定位、超視距感知、車道級導航等服務。作為高德在自動駕駛生態中重點突破的領域,高德高精地圖業務發展快,機會多,希望大家一起加入。
關於高精地圖業務中心
高精地圖是高德最具創新性的業務之一,致力於用感測器丈量世界,用演算法理解世界,用數據重新定義世界。我們幾乎涵蓋最熱門前沿學科,高精地圖和自動駕駛是多學科交叉的應用工程體系。基於感知理解,三維重建,融合定位,計算幾何技術自動化生成高精數字化三維地圖。利用邊緣計算,大數據處理,雲服務,進行實時海量數據地圖重建。通過5G/V2X資訊交換,實現地圖對象間的數據互通,構建一張活地圖。我們不僅僅是數據製作者,更是新生活的定義者。加入我們,未來「由」你。



