基本影像操作和處理(python)
- 2019 年 10 月 3 日
- 筆記
PIL提供了通用的影像處理功能,以及大量的基本影像操作,如影像縮放、裁剪、旋轉、顏色轉換等。
Matplotlib提供了強大的繪圖功能,其下的pylab/pyplot介面包含很多方便用戶創建影像的函數。
為了觀察和進一步處理影像數據,首先需要載入影像文件,並且為了查看影像數據,我們需要將其繪製出來。
from PIL import Image import matplotlib.pyplot as plt import numpy as np # 載入影像 img = Image.open("tmp.jpg") # 轉為數組 img_data = np.array(img) # 可視化 plt.imshow(img_data) plt.show()對於影像,我們常見的操作有調整影像尺寸,旋轉影像以及灰度變換
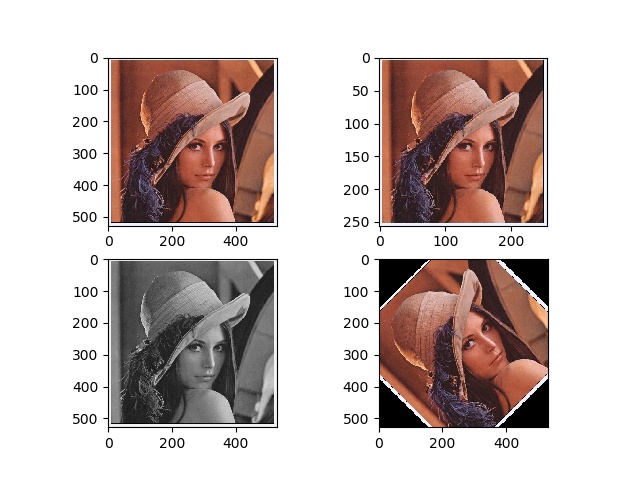
from PIL import Image import matplotlib.pyplot as plt img = Image.open("girl.jpg") plt.figure() # 子圖 plt.subplot(221) # 原圖 plt.imshow(img) plt.subplot(222) # 將影像縮放至 256 * 256 plt.imshow(img.resize((256, 256))) plt.subplot(223) # 將影像轉為灰度圖 plt.imshow(img.convert('L')) plt.subplot(224) # 旋轉影像 plt.imshow(img.rotate(45)) # 保存影像 plt.savefig("tmp.jpg") plt.show()效果演示 :
在平常的使用中,繪製影像的輪廓也經常被使用,因為繪製輪廓需要對每個坐標(x, y)的像數值施加同一個闕值,所以需要將影像灰度化
from PIL import Image import matplotlib.pyplot as plt import numpy as np img = Image.open("girl.jpg") gray_img = np.array(img.convert('L')) plt.figure() # 繪製影像灰度化 plt.gray() # 關閉坐標軸 plt.axis('off') # 繪製灰度影像 plt.contour(gray_img, origin='image') plt.figure() # 繪製直方圖,flatten()表示將數組展平 plt.hist(gray_img.flatten(), 128) plt.show() 輪廓圖及直方圖:

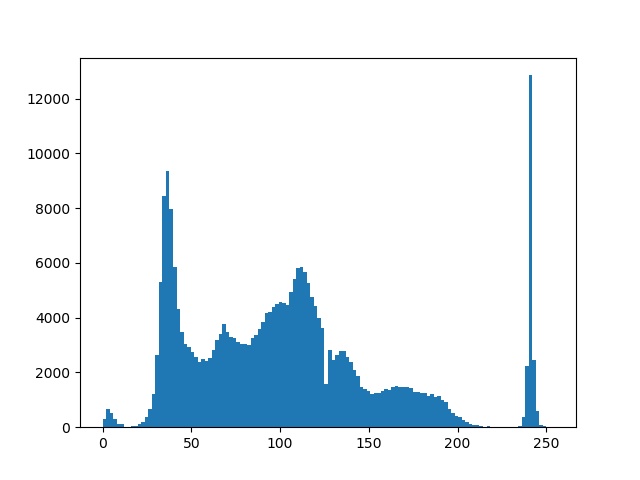
影像的直方圖用來表徵該影像的像素值的分布情況。用一定數目的小區間來指定表徵像素值的範圍,每個小區間會得到落入該小區間表示範圍的像素數目。hist()函數用於繪製影像的直方圖,其只接受一維數組作為第一個參數輸入,其第二個參數用於指定小區間的數目。
有時用戶需要和應用進行交互,如在一幅影像中標記一些點。Pylab/pyplot庫中的ginput()函數就可以實現互動式標註
from PIL import Image import matplotlib.pyplot as plt img = Image.open(r"girl.jpg") plt.imshow(img) x = plt.ginput(3) print("clicked point: ", x)註:該交互在集成編譯環境(pyCharm)中如果不能調出交互窗口則無法進行點擊,可以在命令窗口下成功執行。
以上我們通過numpy的array()函數將Image對象轉換成了數組,以下將展示如何從數組轉換成Image對象
from PIL import Image import numpy as np img = Image.open(r"girl.jpg") img_array = np.array(img) img = Image.fromarray(img_array)在影像灰度變換中有一個非常有用的例子就是直方圖均衡化。直方圖均衡化是指將一幅影像的灰度直方圖變平,使變換後的影像中每個灰度值的分布概率都相同。直方圖均衡化通常是對影像灰度值進行歸一化的一個非常好的方法,並且可以增強影像的對比度。
直方圖均衡化的變換函數是影像中像素值的累積分布函數(cumulative distribution function,將像素值的範圍映射到目標範圍的歸一化操作)。
from PIL import Image import matplotlib.pyplot as plt import numpy as np def histogram_equalization(img: np, nbr_bins=256): imhist, bins = np.histogram(img.flatten()) cdf = imhist.cumsum() # 累計分布函數 # 歸一化 cdf = 255 * cdf / cdf[-1] # 使用累積分布函數進行線性插值,計算新的像素值 img2 = np.interp(img.flatten(), bins[:-1], cdf) return img2.reshape(img.shape), cdf img = Image.open(r"girl.jpg").convert('L') img2, cdf = histogram_equalization(np.array(img)) plt.figure() plt.gray() # 繪製子圖 plt.subplot(232) # 變換函數 plt.plot(cdf) plt.subplot(231) plt.hist(np.array(img).flatten(), 256) # 關閉坐標軸,對上一個子圖有效 plt.axis('off') plt.subplot(233) plt.hist(np.array(img2).flatten(), 256) plt.axis('off') plt.subplot(234) plt.imshow(img) plt.axis('off') plt.subplot(236) plt.imshow(img2) plt.axis('off') # 保存繪製影像 plt.savefig("tmp.jpg") plt.show() 處理結果
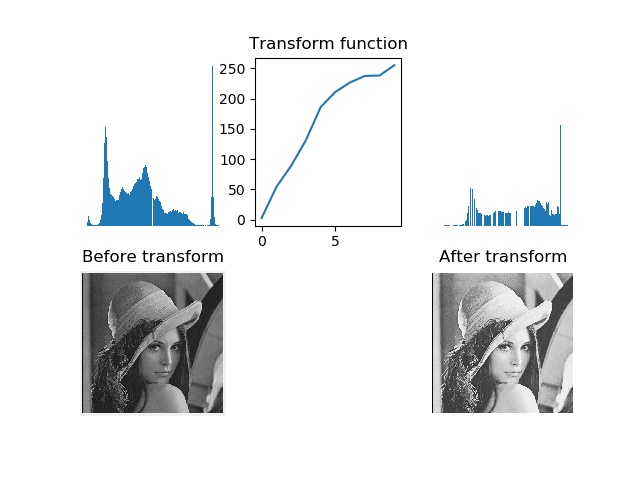
可見,直方圖均衡化的影像的對比度增強了,原先影像灰色區域的斜街變得清晰。
PCA(Principal Component Analysis, 主成分分析)是一個非常有用的降維技巧,它可以在使用儘可能少的維數的前提下,儘可能多地保持訓練數據的資訊。詳細介紹及使用見我的另一篇文章:PCA降維
SciPy是建立在Numpy基礎上,用於數值運算的開源工具包。Scipy提供很多高效的操作,可以實現數值積分、優化、統計、訊號處理,以及對我們來說最為重要的影像處理功能。
影像的高斯模糊是非常經典的影像卷積例子。本質上,影像模糊就是將(灰度)影像 (I) 和一個高斯核進行卷積操作:
[ I_sigma = I * G_sigma ]
其中, (*) 表示卷積操作;(G) 表示標準差為 (sigma) 的二維高斯核,定義為:
[ G_sigma = frac{1}{2pi sigma^2} e^{-(x^2+y^2) / 2 sigma^2} ]
高斯模糊通常是其他影像處理操作的一部分,比如影像插值操作、興趣點計算以及其他應用。
Scipy有用來做濾波操作的scipy.ndimage.filters模組。該模組使用快速一維分離的方式來計算卷積。使用方式:
from PIL import Image import numpy as np from scipy.ndimage import filters img = Image.open(r"girl.jpg").convert('L') img = np.array(img) img2 = filters.gaussian_filter(img, 2) img3 = filters.gaussian_filter(img, 5) img4 = filters.gaussian_filter(img, 10)繪製結果
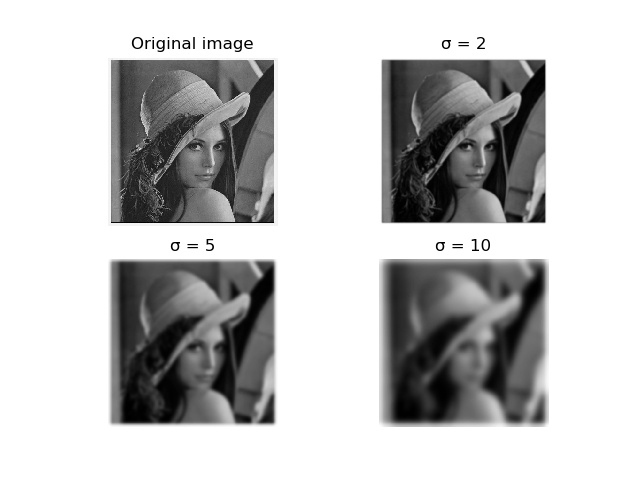
上面使用的gaussian_filter()函數中的後一個參數表示標準差 (sigma) ,可見隨著 (sigma) 的增加,影像變得越來越模糊。 (sigma) 越大,處理後影像細節丟失越多。如果是打算模糊一幅彩色影像,只需要簡單地對每一個顏色通道進行高斯模糊:
from PIL import Image import numpy as np from scipy.ndimage import filters img = Image.open(r"girl.jpg") img = np.array(img) img2 = np.zeros(img.shape) for i in range(img2.shape[2]): img2[:, :, i] = filters.gaussian_filter(img[:, :, i], 5) # 將像素值用八位表示 img2 = np.array(img2, 'uint8')模糊結果:
在很多應用中,影像強度的變化情況是非常重要的,強度的變化可以使用灰度影像的 (x) 和 (y) 方嚮導數 (I_x) 和 (I_y)進行描述
影像的梯度向量為 (bigtriangledown I = [I_x, I_y]^T)。梯度有兩個重要屬性,一是梯度的大小:
[ | bigtriangledown I | = sqrt{I_x^2 + I_y^2} ]
它描述了影像強度變化的強弱,另一個是影像的角度:
[ alpha = arctan2(I_x, I_y) ]
它描述了影像在每個點上強度變化最大的方向。Numpy中的arctan2()函數返回弧度表示的有符號角度,角度的變化區間為 ((-pi, pi))
可以使用離散近似的方式來計算影像的導數。影像倒數大多數可以通過卷積簡單地實現:
[ I_x = I*D_x 和 I_y = I*D_y ]
對於 (D_x) 和 (D_y),通常選擇Prewitt濾波器:
[ D_x = left[ begin{matrix} -1 & 0 & 1 \ -1 & 0 & 1 \ -1 & 0 & 1 end{matrix} right] ]
和
[ D_y = left[ begin{matrix} -1 & -1 & -1 \ 0 & 0 & 0 \ 1 & 1 & 1 end{matrix} right] ]
或者Sobel濾波器
[ D_x = left[ begin{matrix} -1 & 0 & 1 \ -2 & 0 & 2 \ -1 & 0 & 1 end{matrix} right] ]
和
[ D_y = left[ begin{matrix} -1 & -2 & -1 \ 0 & 0 & 0 \ 1 & 2 & 1 end{matrix} right] ]
這些導數濾波器可以使用scipy.ndimage.filters模組地標準卷積操作來簡單地實現
from PIL import Image import numpy as np from scipy.ndimage import filters img = Image.open(r"girl.jpg").convert('L') img = np.array(img) imgx = np.zeros(img.shape) # Sobel導數濾波器 filters.sobel(img, 1, imgx) imgy = np.zeros(img.shape) filters.sobel(img, 0, imgy) magnitude = np.sqrt(imgx**2+imgy**2)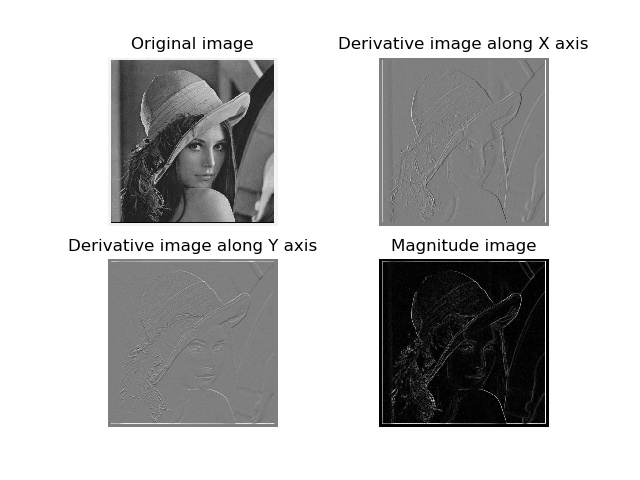
sobel()函數的第二個參數選擇 (x) 或 (y) 方向的導數,第三個參數保存輸出變數。在影像中,正導數顯示為亮的像素,負導數顯示為暗的像素,灰色區域表示導數的值接近零。
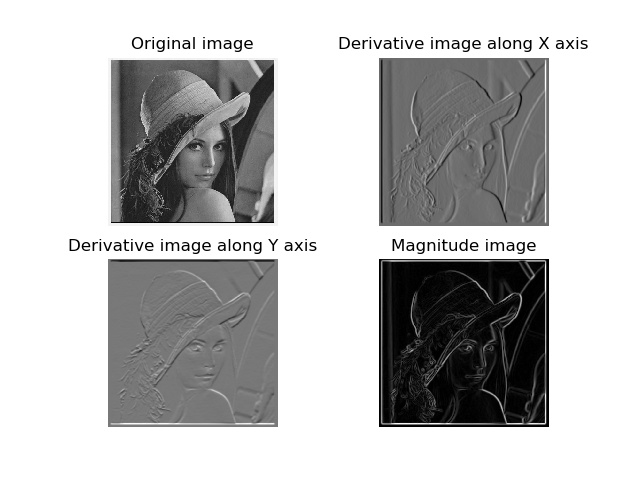
上面計算影像導數的方法存在缺陷:在該方法中,濾波器的尺度需要隨著影像解析度的變化而變化(?)。為了在影像雜訊方面更穩健,以及在任意尺度上計算導數,我們可以使用高斯導數濾波器:
[ I_x = I * G_{sigma x} 和 I_y = I*G_{sigma y} ]
其中,(G_{sigma x}) 和(G_{sigma y})表示(G_sigma) 在 (x) 和 (y) 方向上的導數,(G_sigma) 表示標準差為 (sigma) 的高斯函數。以下給出使用樣例:
from PIL import Image import matplotlib.pyplot as plt import numpy as np from scipy.ndimage import filters img = Image.open(r"girl.jpg").convert('L') img = np.array(img) sigma = 2 imgx = np.zeros(img.shape) imgy = np.zeros(img.shape) filters.gaussian_filter(img, (sigma, sigma), (0, 1), imgx) filters.gaussian_filter(img, (sigma, sigma), (1, 0), imgy) magnitude = np.sqrt(imgx**2+imgy**2)結果演示:
在對影像進行處理時,去噪也是很重要的一環。影像去噪是在去除影像雜訊的同時,儘可能地保留影像細節和結構地處理技術,以下給出使用ROF去噪模型地Demo:
from PIL import Image import matplotlib.pyplot as plt import numpy as np from scipy.ndimage import filters def de_noise(img, U_init, tolerance=0.1, tau=0.125, tv_weight=100): U = U_init Px = Py = img error = 1 while error > tolerance: Uold = U # 變數U梯度的x分量 gradUx = np.roll(U, -1, axis=1)-U # 變數U梯度的y分量 gradUy = np.roll(U, -1, axis=0)-U # 更新對偶變數 PxNew = Px + (tau/tv_weight)*gradUx PyNew = Py + (tau/tv_weight)*gradUy NormNew = np.maximum(1, np.sqrt(PxNew**2+PyNew**2)) # 更新x,y分量 Px = PxNew / NormNew Py = PyNew / NormNew # 更新原始變數 RxPx = np.roll(Px, 1, axis=1) # 將x分量向x軸正方向平移 RyPy = np.roll(Py, 1, axis=0) # 將y分量向y軸正方向平移 DivP = (Px - RxPx) + (Py - RyPy) # 對偶域散度 U = img + tv_weight * DivP error = np.linalg.norm(U - Uold)/np.sqrt(img.shape[0] * img.shape[1]) return U, img-U if __name__ == '__main__': im = np.zeros((500, 500)) im[100:400,100:400] = 128 im[200:300, 200:300] = 255 im = im + 30 * np.random.standard_normal((500, 500)) U, T = de_noise(im, im) G = filters.gaussian_filter(im, 10) plt.figure() plt.gray() plt.subplot(221).set_title("Original image") plt.axis('off') plt.imshow(im) plt.subplot(222).set_title("Gauss blurred image") plt.axis('off') plt.imshow(G) plt.subplot(223).set_title("ROF") plt.axis('off') plt.imshow(U) plt.savefig('tmp.jpg') plt.show() 結果演示
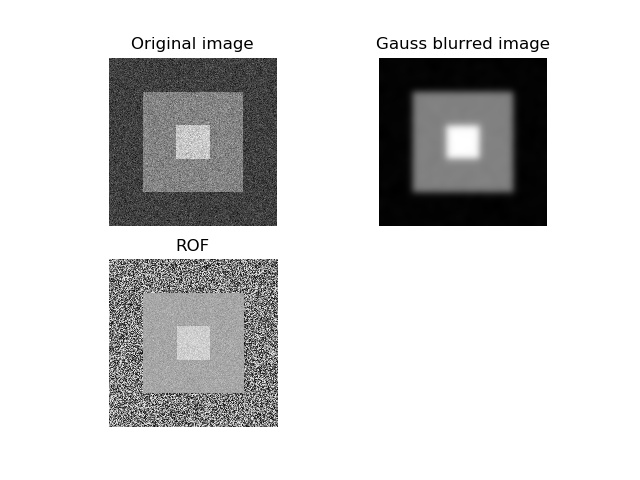
ROF去噪後的影像保留了邊緣和影像的結構資訊,同時模糊了「雜訊」。
np.roll()函數可以循環滾動元素,np.linalg.norm()用于衡量兩個數組間的差異。
之後有空將補充影像去噪
參考書籍
Python電腦視覺
