RANSAC簡史(一)——RANSAC之初
- 2019 年 10 月 3 日
- 筆記
在開始正式的介紹之前,先做一個簡單的定義,以免產生歧義:
1、本文中的“數據點”是指:
1)對於直線擬合、平面擬合等問題,即為相應的二維/三維坐標點;
2)對於從匹配點中估計基本矩陣、單應矩陣等問題,即為一對匹配點坐標級聯組成的向量。
一、RANSAC之前
RANSAC在1981年被Martin A. Fischler and Robert C. Bolles兩人提出,以解決給定點集的模型估計問題。在現實應用中,我們經常遇到的情況是:給定的點集中存在錯誤的點。傳統的模型估計方法,大都採用所有的點進行模型最小二乘的擬合,這種方法往往容易受野點影響而得到錯誤結果(相當於陷入局部最優)。該最小二乘法的一種變種是,首先用所有點估計模型,而後剔除誤差較大的點,而後再次估計模型,以此迭代。然而,由於野點的影響,往往會導致最開始估計的模型不準確,從而導致正確的點被剔除掉,最終導致模型估計的失敗。下面是一個例子:
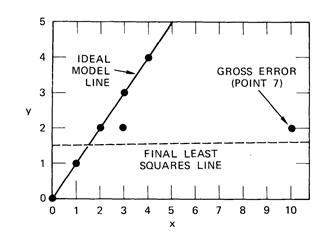
由於點7的影響,導致正確的點被剔除,最終擬合的直線為虛線,而不是正確的實線。
二、RANSAC之1.0版本
RANSAC方法為第一個方法,採用最少能決定模型的點進行模型估計的方法,最原始的方法被描述為:
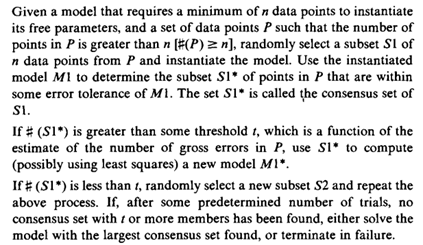
整個演算法被分為三步:
1) 從所有的數據中取樣n個點,以能確定出模型;
2) 利用取樣點計算模型;
3) 利用模型來確定其他點是否是內點;如果內點率達到指定值,演算法終止,並用所有內點優化模型;否則,繼續上述過程,直到達到指定的迭代次數,此時將最高內點率對應的模型作為最終模型。
上述思路簡潔明了,其核心思想就是:待求解的模型,應該是能同時使最多數據點都符合模型。從這一思想從發,其實可以有另一條不同的思路,後續我會進一步介紹。
三、RANSAC 1.0版本剖析
下面讓我們回顧下該方法,看該方法在具體應用中,還需要解決哪些問題:
演算法第一步,從數據中取樣n個點,這裡要求n為能確定模型的最小的數據量,那麼該選取怎樣的取樣準則?從所有數據中取樣,還是僅僅從部分數據(總數據的一個子集)中進行取樣?每個數據被採集的可能性是否相同?採取隨機取樣,還是按一定順序進行取樣?是否需要避免同一組數據被重複取樣,如果需要,該如何避免?這裡先給出通常的做法,更加細緻的分析也留到後續。通常情況下,我們在所有數據中進行隨機取樣,且所有數據每次被取樣的可能性是一樣的,而且我們通常不考慮兩次取樣得到的樣本是重複的。
演算法第二步,利用取樣數據計算模型。我們知道,在第一步中,我們要求取樣點儘可能少,同時我們也知道,當數據點存在雜訊(通常考慮為高斯雜訊)時,樣本點的數目越多,求解的模型越準確。這就意味著我們此刻求解的模型不夠準確,那麼這個不夠準確的模型,是否能夠用來判斷其他點是否是內點?其次,如果我們待求解的問題,無法用一個模型,或者無法用一個僅包含若干個參數的模型進行表達,此時是否還能使用“最大一致性”的思路?針對第一個問題,我們通常認為雖然模型存在誤差,但是在後續內點判斷中,我們設定一定的誤差閾值,因此能夠用該模型來近似最終模型。同時,一些RANSAC的改進,採用“局部優化”技術來一定層度解決這一問題,關於該方法的討論,同樣會在後續,進行詳細的剖析。針對第二個問題,有一些無模型的“最大一致性估計”方法,同樣也留待後續介紹。
演算法第三步,首先,利用求解的模型確定其他點是否為內點。一個重要的問題是,如何判斷其他點是否為內點?通過其他點與模型的符合程度?那麼如何設置這樣一個閾值?有時一個數據是否為內點(例如兩個數據點相衝突,不可能同時為內點。這種情況會發生在:根據兩張圖特徵點匹配,求解其基礎矩陣時,如果A圖中的兩個點,匹配到B圖中的同一個點),還與其他數據相關,那麼此時如何考慮數據間的關聯?
其次,“如果內點率達到指定值,則終止演算法”,那麼如何設置這樣一個閾值?因為對於一組數據,通常情況下我們是無法知道其最大內點率。(但問題也不是絕對,我們也可以事先求解出最優模型對應的內點率。哈哈,是不是很crazy,這也留待後續的剖析。)因此,這一迭代的終止條件,現在的RANSAC演算法中,已經很少見了。我們通常採用一定置信度下,達到能夠保證至少一次所有的取樣點都為內點的最少取樣次數,作為終止條件。
最後,如何確定最少的取樣次數。原文中提出了兩種方案。假設在一次取樣中,所有點都為內點的概率為p,那麼“所有取樣點都為內點首先發生在第k次取樣”這一事件服從幾何分布(參考射擊時第k次才命中這一問題),於是:

原文方案一:求解k的期望值和方差,採用期望值加上2到3倍方差,作為取樣次數。這種方案,可以理解為求解分布的“上分位數”,以保證以一定“所有取樣點都為內點”在進行k次取樣後發生過。
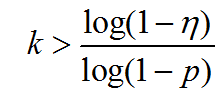
原文方案二:如果要求第 次取樣後,至少一次“所有取樣點都為內點”的概率大於 那麼:
![]()
由此,
這裡一次取樣中所有點都為內點的概率為:
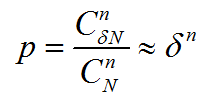
其中N為總數據量,n為最小取樣數,為內點率。
在此,我們可以看出,為什麼選取最少的樣本點進行模型估計。因為,取樣量每增加1,對應需要進行的取樣次數就增加很多,尤其是在內點率很低的情況下,這種情況尤其嚴重。
寫到這裡,我們已經對RANSAC最初版本進行了詳細的介紹,同時我們很具體剖析了其各個步驟可能面臨的問題。針對這些問題,後續衍生出了很多RANSAC的變種,我們將在後續進行具體的介紹。
參考文獻:
[1] Fischler M A . Readings in Computer Vision || Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[J]. Readings in Computer Vision, 1987:726-740.
