STM32進階之串口環形緩衝區實現
- 2019 年 10 月 16 日
- 筆記
隊列的概念
在此之前,我們來回顧一下隊列的基本概念:
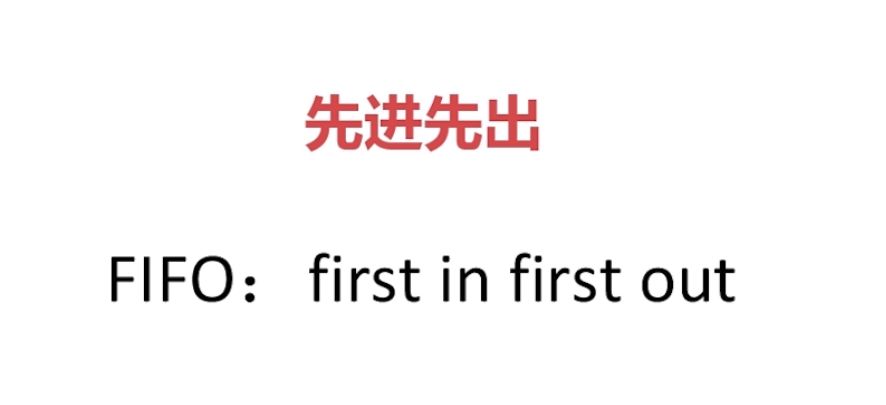
隊列 (Queue):是一種先進先出(First In First Out ,簡稱 FIFO)的線性表,只允許在一端插入(入隊),在另一端進行刪除(出隊)。
隊列的特點
類似售票排隊窗口,先到的人看到能先買到票,然後先走,後來的人只能後買到票

隊列的常見兩種形式
普通隊列
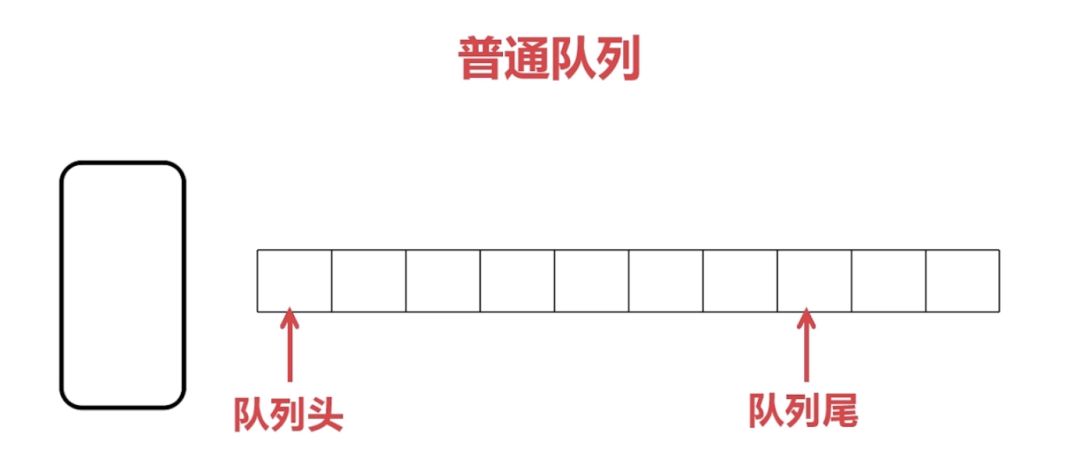
在電腦中,每個資訊都是存儲在存儲單元中的,比喻一下吧,上圖的一些小正方形格子就是一個個存儲單元,你可以理解為常見的數組,存放我們一個個的資訊。
當有大量數據的時候,我們不能存儲所有的數據,那麼電腦處理數據的時候,只能先處理先來的,那麼處理完後呢,就會把數據釋放掉,再處理下一個。那麼,已經處理的數據的記憶體就會被浪費掉。因為後來的數據只能往後排隊,如過要將剩餘的數據都往前移動一次,那麼效率就會低下了,肯定不現實,所以,環形隊列就出現了。
環形隊列
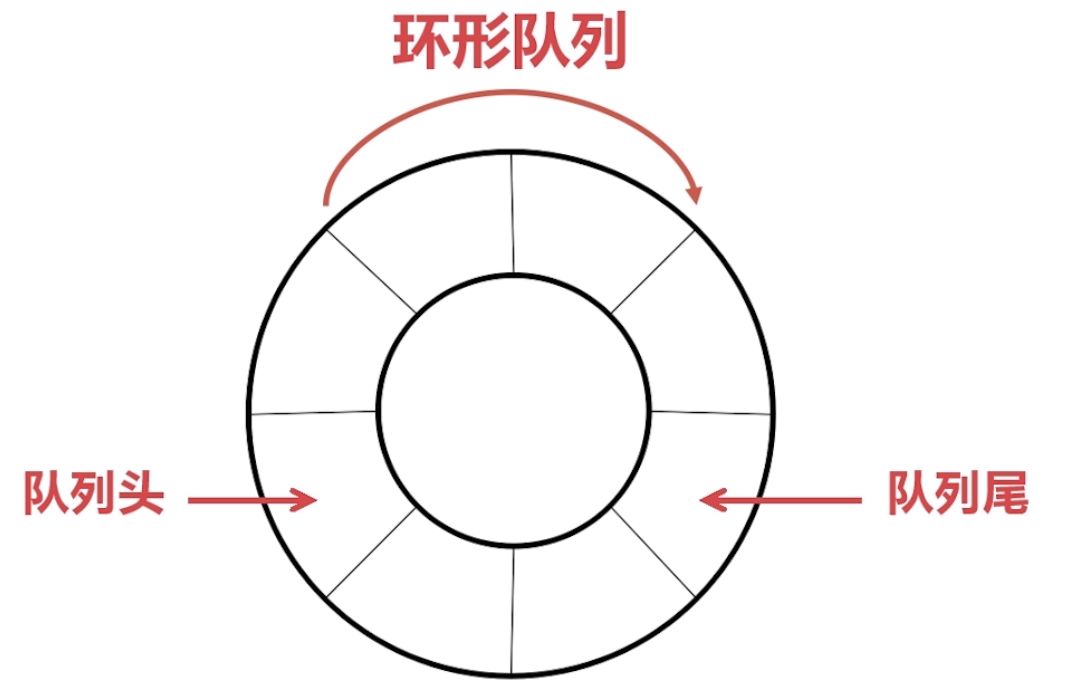
它的隊列就是一個環,它避免了普通隊列的缺點,就是有點難理解而已,其實它就是一個隊列,一樣有隊列頭,隊列尾,一樣是先進先出(FIFO)。我們採用順時針的方式來對隊列進行排序。
-
隊列頭 (Head) : 允許進行刪除的一端稱為隊首。
-
隊列尾 (Tail) : 允許進行插入的一端稱為隊尾。
環形隊列的實現:在電腦中,也是沒有環形的記憶體的,只不過是我們將順序的記憶體處理過,讓某一段記憶體形成環形,使他們首尾相連,簡單來說,這其實就是一個數組,只不過有兩個指針,一個指向列隊頭,一個指向列隊尾。指向列隊頭的指針(Head)是緩衝區可讀的數據,指向列隊尾的指針(Tail)是緩衝區可寫的數據,通過移動這兩個指針(Head) &(Tail)即可對緩衝區的數據進行讀寫操作了,直到緩衝區已滿(頭尾相接),將數據處理完,可以釋放掉數據,又可以進行存儲新的數據了。
實現的原理:初始化的時候,列隊頭與列隊尾都指向0,當有數據存儲的時候,數據存儲在『0』的地址空間,列隊尾指向下一個可以存儲數據的地方『1』,再有數據來的時候,存儲數據到地址『1』,然後隊列尾指向下一個地址『2』。當數據要進行處理的時候,肯定是先處理『0』空間的數據,也就是列隊頭的數據,處理完了數據,『0』地址空間的數據進行釋放掉,列隊頭指向下一個可以處理數據的地址『1』。從而實現整個環形緩衝區的數據讀寫。
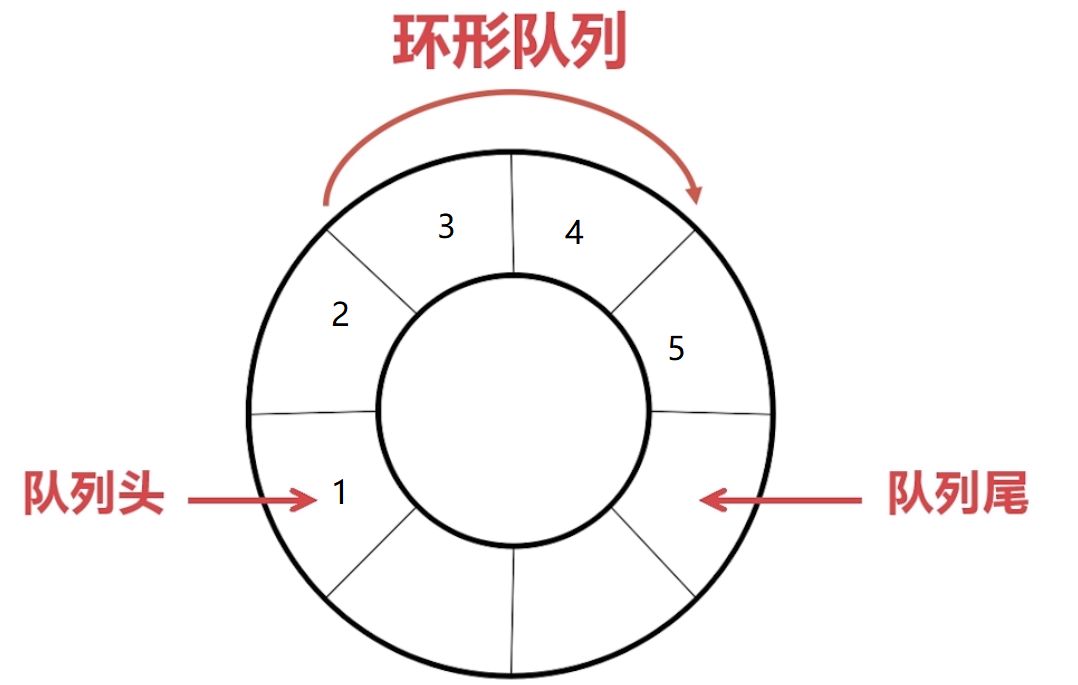
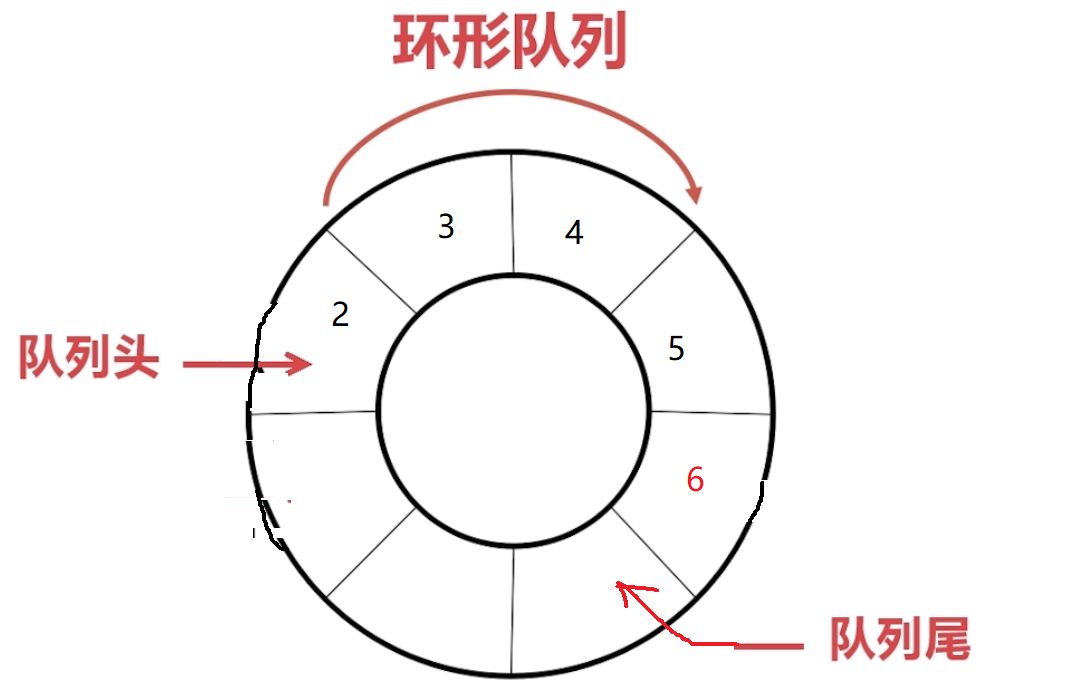
看圖,隊列頭就是指向已經存儲的數據,並且這個數據是待處理的。下一個CPU處理的數據就是1;而隊列尾則指向可以進行寫數據的地址。當1處理了,就會把1釋放掉。並且把隊列頭指向2。當寫入了一個數據6,那麼隊列尾的指針就會指向下一個可以寫的地址。
從隊列到串口緩衝區的實現
串口環形緩衝區收發:在很多入門級教程中,我們知道的串口收發都是:接收一個數據,觸發中斷,然後把數據發回來。這種處理方式是沒有緩衝的,當數量太大的時候,亦或者當數據接收太快的時候,我們來不及處理已經收到的數據,那麼,當再次收到數據的時候,就會將之前還未處理的數據覆蓋掉。那麼就會出現丟包的現象了,對我們的程式是一個致命的創傷。
那麼如何避免這種情況的發生呢,很顯然,上面說的一些隊列的特性很容易幫我們實現我們需要的情況。將接受的數據快取一下,讓處理的速度有些許緩衝,使得處理的速度趕得上接收的速度,上面又已經分析了普通隊列與環形隊列的優劣了,那麼我們肯定是用環形隊列來進行實現了。下面就是程式碼的實現:
定義一個結構體:
typedef struct { u16 Head; u16 Tail; u16 Lenght; u8 Ring_Buff[RINGBUFF_LEN]; }RingBuff_t; RingBuff_t ringBuff;//創建一個ringBuff的緩衝區初始化
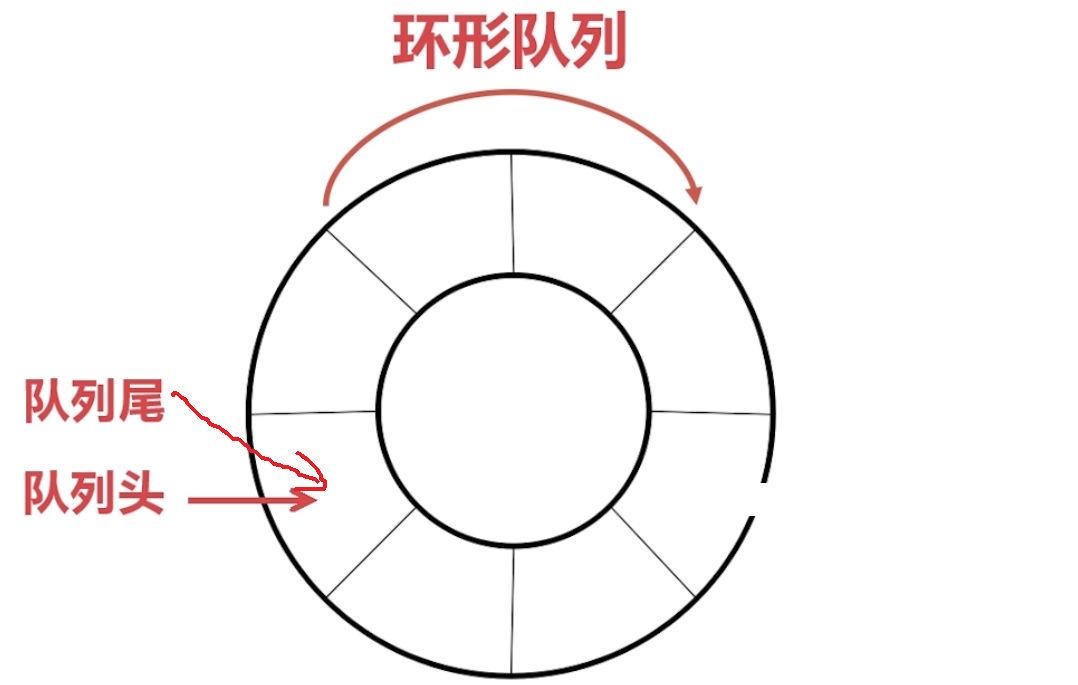
初始化結構體相關資訊:使得我們的環形緩衝區是頭尾相連的,並且裡面沒有數據,也就是空的隊列。
/** * @brief RingBuff_Init * @param void * @return void * @author 傑傑 * @date 2018 * @version v1.0 * @note 初始化環形緩衝區 */ void RingBuff_Init(void) { //初始化相關資訊 ringBuff.Head = 0; ringBuff.Tail = 0; ringBuff.Lenght = 0; }初始化效果如下:
寫入環形緩衝區的程式碼實現:
/** * @brief Write_RingBuff * @param u8 data * @return FLASE:環形緩衝區已滿,寫入失敗;TRUE:寫入成功 * @author 傑傑 * @date 2018 * @version v1.0 * @note 往環形緩衝區寫入u8類型的數據 */ u8 Write_RingBuff(u8 data) { if(ringBuff.Lenght >= RINGBUFF_LEN) //判斷緩衝區是否已滿 { return FLASE; } ringBuff.Ring_Buff[ringBuff.Tail]=data; // ringBuff.Tail++; ringBuff.Tail = (ringBuff.Tail+1)%RINGBUFF_LEN;//防止越界非法訪問 ringBuff.Lenght++; return TRUE; }讀取緩衝區的數據的程式碼實現:
/** * @brief Read_RingBuff * @param u8 *rData,用於保存讀取的數據 * @return FLASE:環形緩衝區沒有數據,讀取失敗;TRUE:讀取成功 * @author 傑傑 * @date 2018 * @version v1.0 * @note 從環形緩衝區讀取一個u8類型的數據 */ u8 Read_RingBuff(u8 *rData) { if(ringBuff.Lenght == 0)//判斷非空 { return FLASE; } *rData = ringBuff.Ring_Buff[ringBuff.Head];//先進先出FIFO,從緩衝區頭出 // ringBuff.Head++; ringBuff.Head = (ringBuff.Head+1)%RINGBUFF_LEN;//防止越界非法訪問 ringBuff.Lenght--; return TRUE; }對於讀寫操作需要注意的地方有兩個:
-
判斷隊列是否為空或者滿,如果空的話,是不允許讀取數據的,返回FLASE。如果是滿的話,也是不允許寫入數據的,避免將已有數據覆蓋掉。那麼如果處理的速度趕不上接收的速度,可以適當增大緩衝區的大小,用空間換取時間。
-
防止指針越界非法訪問,程式有說明,需要使用者對整個緩衝區的大小進行把握。
那麼在串口接收函數中:
void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷 { USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清楚標誌位 Write_RingBuff(USART_ReceiveData(USART1)); //讀取接收到的數據 } }測試效果
測試數據沒有發生丟包現象
補充
對於現在的階段,傑傑我本人寫程式碼也慢慢學會規範了。所有的程式碼片段均使用了可讀性很強的,還有可移植性也很強的。我使用了宏定義來決定是否開啟環形緩衝區的方式來收發數據,移植到大家的程式碼並不會有其他副作用,只需要開啟宏定義即可使用了。
#define USER_RINGBUFF 1 //使用環形緩衝區形式接收數據 #if USER_RINGBUFF /**如果使用環形緩衝形式接收串口數據***/ #define RINGBUFF_LEN 200 //定義最大接收位元組數 200 #define FLASE 1 #define TRUE 0 void RingBuff_Init(void); u8 Write_RingBuff(u8 data); u8 Read_RingBuff(u8 *rData); #endif當然,我們完全可以用空閑中斷與DMA傳輸,效率更高,但是某些單片機沒有空閑中斷與DMA,那麼這種環形緩衝區的作用就很大了,並且移植簡便。
說明:文章部分截圖來源慕課網james_yuan老師的課程
喜歡就關注我吧!

相關程式碼可以在公眾號後台獲取。
更多資料歡迎關注「物聯網IoT開發」公眾號!