python串口助手
- 2019 年 10 月 10 日
- 筆記
最近項目中要使用模擬數據源通過向外發送數據,以前都是用C#編寫,最近在研究python,所以就用python寫了一個串口助手,方便以後的測試。
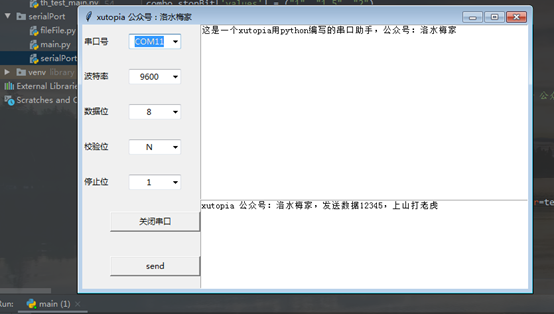
在電腦上通過虛擬串口助手產生兩個虛擬串口,運行編寫的串口助手
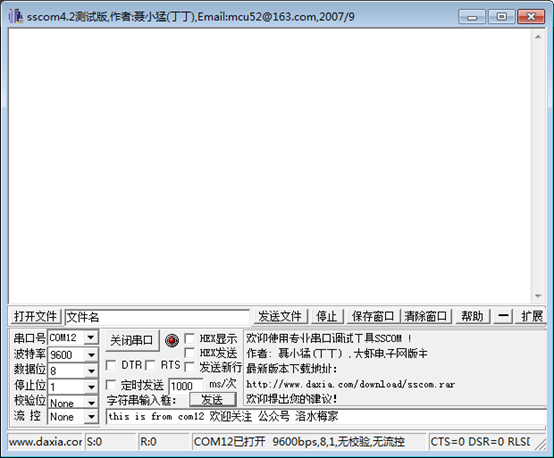
另外,打開一個串口調試助手,輔助測試
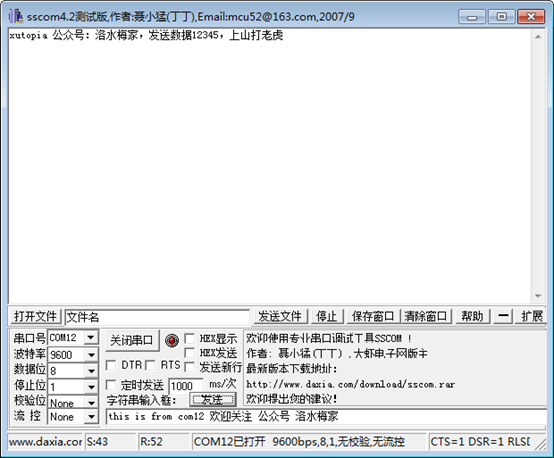
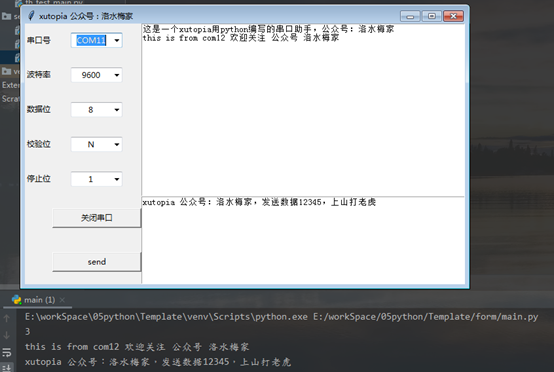
兩者互發數據,可以看到編寫的串口助手能夠正常接收發送,並且在後台我們也把接收到的數據列印了出來
下面先講解關於介面的程式碼,這裡只是簡單的使用tkinter做介面,如果想要更好的介面效果,可以嘗試一下QT。
首先是介面中串口設置區域的程式碼,介面布局統一用grid來布局,當然也有其他的布局方法
1 #------------------------------------------------------------------------- 2 #面板布局區 3 root = Tk() 4 root.title('xutopia 公眾號:洛水梅家') 5 6 #------------------------------------------------------------------------- 7 #串口設置區 8 label_com = Label(root, text="串口號", height=2).grid(row=0, column=0) 9 label_bps = Label(root, text="波特率", height=2).grid(column=0, row=1) 10 label_datBit = Label(root, text="數據位", height=2).grid(column=0, row=2) 11 label_parity = Label(root, text="校驗位", height=2).grid(column=0, row=3) 12 label_stop_bit = Label(root, text="停止位", height=2).grid(column=0, row=4)
接下來是串口號的combobox的設置,其中serialPortFile.GetCom()是獲取所有串口號的函數,接下來會講解
#串口號 varPort = StringVar() combo_com = ttk.Combobox(root, textvariable=varPort, width=8, height=2, justify=CENTER) serial_com = serialPortFile.GetCom() combo_com['values'] = serial_com #combo_com.bind("<<ComboboxSelected>>", lambda event: combo1_handler(var=varPort.get())) combo_com.current(0) combo_com.grid(column=1, row=0)
1 #波特率 2 varBitrate = StringVar() 3 combo_bps = ttk.Combobox(root, textvariable=varBitrate, width=8, height=2, justify=CENTER) 4 combo_bps['values'] = ("9600", "19200", "38400", "115200") 5 #combo_bps.bind("<<ComboboxSelected>>", lambda event: combo2_handler(var=varBitrate.get())) 6 combo_bps.current(0) 7 combo_bps.grid(column=1, row=1) 8 #數據位 9 combo_byteBit = ttk.Combobox(root, width=8, height=2, justify=CENTER) 10 combo_byteBit['values'] = ("5", "6", "7", "8") 11 combo_byteBit.current(3) 12 combo_byteBit.grid(column=1, row=2) 13 #奇偶校驗 14 combo_parity = ttk.Combobox(root, width=8, height=2, justify=CENTER) 15 combo_parity['values'] = ("N", "O", "E") 16 combo_parity.current(0) 17 combo_parity.grid(column=1, row=3) 18 #停止位 19 combo_stopBit = ttk.Combobox(root, width=8, height=2, justify=CENTER) 20 combo_stopBit['values'] = ("1", "1.5", "2") 21 combo_stopBit.current(0) 22 combo_stopBit.grid(column=1, row=4) 23 serialPortFile.text_rx = Text(root,width=70,height=20) 24 serialPortFile.text_rx.grid(row=0,column=3,rowspan=5) 25 serialPortFile.text_rx.insert(END,'這是一個xutopia用python編寫的串口助手,公眾號:洛水梅家n') 26 text_tx = Text(root,width=70,height=10) 27 text_tx.grid(row=5,column=3,rowspan=2) 28 text_tx.insert(END,'xutopia 公眾號:洛水梅家,發送數據12345,上山打老虎') 29 button_send = Button(root, text='send', width=18, height=1) 30 button_send.bind("<Button-1>", lambda event: serialPortFile.usart_sent(var=text_tx.get("0.0", "end"))) 31 button_send.grid(column=1, row=6) 32 #串口開關按鈕 33 serialPortFile.button_var = StringVar() 34 serialPortFile.button_var.set("打開串口") 35 buttonOpenCom = Button(root, textvariable=serialPortFile.button_var, width=18, height=1) 36 buttonOpenCom.bind("<Button-1>", lambda event: serialPortFile.usart_ctrl(combo_com.get(), combo_bps.get(),combo_parity.get(),combo_stopBit.get(),combo_byteBit.get())) 37 buttonOpenCom.grid(column=1, row=5)
以上就是介面相關的程式碼,最終效果也就是上圖顯示的效果,很簡單。接下來介紹python串口的邏輯程式碼部分。在另外一個模組中serialPortFile.py
獲取電腦中所有的串口號的函數,注意這裡通過serial.tools.list_ports.comports()獲取所有的串口號之後進行了一步轉換,存在一個數組中,這樣,傳入serial中才能被識別。
1 # 獲取並存儲串口號到數組 2 def GetCom(): 3 port_list = list(serial.tools.list_ports.comports()) 4 print(len(port_list)) 5 portcnt = len(port_list) 6 serial_com = [] 7 for m in range(portcnt): 8 port_list_1 = list(port_list[m]) 9 serial_com.append(port_list_1[0]) 10 return serial_com
串口打開關閉函數,串口打開之後創建了一個執行緒threading,執行緒中一直監視串口的狀態,一旦接受到數據,就把數據顯示到接受數據顯示框中。有關python執行緒threading的內容可以在我的公眾號,洛水梅家中查看。
注意在程式碼中加了一個if ser.is_open:的條件判斷,不加入這個條件的話,很有可能重複打開串口而報錯誤。
同時在按鍵Button的狀態也隨著串口的開關狀態而變化。
def usart_ctrl(com, bps,parity_,stopbits_,bytesize_): #print(__file__, sys._getframe().f_lineno, port_, bitrate_, var.get()) global ser, button_var if button_var.get() == "打開串口": button_var.set("關閉串口") ser = serial.Serial( port=com, baudrate=int(bps), parity=parity_, timeout=0.2, stopbits=float(stopbits_), bytesize=int(bytesize_)) if ser.is_open: pass else: ser.open() recv_data = threading.Thread(target=thread_recv) recv_data.start() else: button_var.set("打開串口") if ser.is_open: ser.close() else: pass
def usart_sent(var): #print(__file__, sys._getframe().f_lineno, "-->", var) print(var) if ser.is_open: ser.write(var.encode("gb2312")) def thread_recv(): global text_rx while True: try: read = ser.readall() if len(read) > 0: print(bytes(read).decode('gb2312')) # print(__file__, sys._getframe().f_lineno, "<--", bytes(read).decode('ascii')) text_rx.insert(END,bytes(read).decode('gb2312')) except Exception as e: print(e) time.sleep(1) pass
上面就是關於串口助手的所有程式碼介紹,更多詳細內容,關注公眾號 洛水梅家 免費獲取源碼
後台回復python_com,免費獲取源碼

