關於飛機姿態角的學習分享
- 2020 年 3 月 17 日
- 筆記
一、了解一下什麼是飛機姿態角
飛機姿態角是按歐拉概念定義的,故亦稱歐拉角。飛機姿態角是由機體坐標系與地理坐標系之間的關係確定的,用航向角、俯仰角和橫滾角三個歐拉角表示。
不同的轉動順序會形成不同的坐標變換矩陣,通常按航向角、俯仰角和橫滾角的順序來表示機體坐標系相對地理坐標系的空間轉動。
1、什麼是歐拉角?
歐拉角就是物體繞坐標系三個坐標軸(x,y,z軸)的旋轉角度。
heading-pitch-bank系統不是惟一的歐拉角系統,繞任意三個互相垂直軸的任意旋轉序列都能定義一個方位。所以,多種選擇導致了歐拉角約定的多樣性:
1)heading-pitch-bank系統有兩個名稱,當然,不同的名字並不代表不同的約定,這其實並不重要,一組常用的術語是roll-pitch-yaw,其中的roll對應與bank,yaw對應於heading,它定義了從物體坐標繫到慣性坐標系的旋轉順序
2)任意三個軸都能作為旋轉軸,不一定必須是笛卡爾軸,但是用笛卡爾軸最有意義
3)也可以選用右手坐標規則
4)旋轉可以以不同的順序進行
3,優點:1)容易使用;2)表達簡潔;3)任意三個角都是合法的
4,缺點:1)給定方位的表達方式不唯一;2)兩個角度間求插值非常困難
採用限制歐拉角的方法來避免以上問題的出現:heading限制在+-180,pitch為+-90。
歐拉角可分為兩種情況:
1,靜態:即繞世界坐標系三個軸的旋轉,由於物體旋轉過程中坐標軸保持靜止,所以稱為靜態。
2,動態:即繞物體坐標系三個軸的旋轉,由於物體旋轉過程中坐標軸隨着物體做相同的轉動,所以稱為動態。
對於分別繞三個坐標軸旋轉的情況,下述定理成立:
物體的任何一種旋轉都可分解為分別繞三個軸的旋轉,但分解方式不唯一。
飛機的姿態角應屬於動態的歐拉角。
假設繞y軸旋轉為Yaw(航向角),繞x軸旋轉為pitch(俯仰角),繞z軸旋轉為roll(滾轉角),則先heading45°再pitch90°等價於先pitch90°再bank45°。

二、分別認識一下各個姿態角
Yaw(偏航):歐拉角向量的y軸
機體坐標系xb軸在水平面上投影與地面坐標系xg軸(在水平面上,指向目標為正)之間的夾角,由xg軸逆時針轉至機體xb的投影線時,偏航角為正,即機頭右偏航為正,反之為負。

Pitch(俯仰):歐拉角向量的x軸
俯仰角θ(pitch):機體坐標系X軸與水平面的夾角。當X軸的正半軸位於過坐標原點的水平面之上(抬頭)時,俯仰角為正,否則為負。
Roll(翻滾): 歐拉角向量的z軸
翻滾角Φ(roll):機體坐標系zb軸與通過機體xb軸的鉛垂面間的夾角,機體向右滾為正,反之為負。

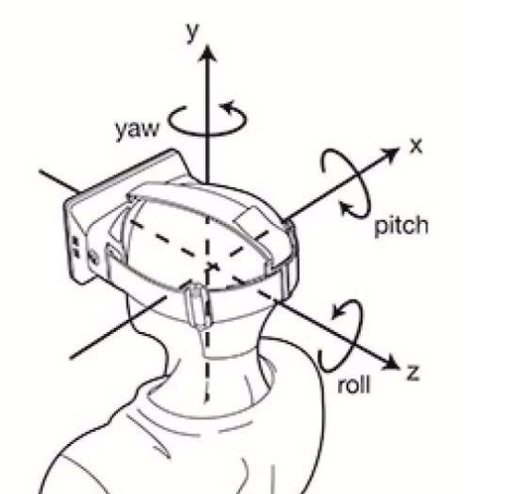
想像一下飛機,yaw指水平方向的機頭指向,它繞y軸旋轉。Pitch指與水平方向的夾角,繞x軸旋轉。Roll指飛機的翻滾,繞z軸旋轉。如下圖
除歐拉角以外,常用的還有四元素法和旋轉矩陣法。
簡而言之,三種方法的特點如下:
1)歐拉角最直觀、最容易理解、存儲空間少,但是歐拉角存在萬向節死鎖現象、插值速度不均勻等缺點,而且不可以在計算機中直接運算;
2)四元素不存在萬向節死鎖問題、利用球面插值可以獲得均勻的轉速、存儲空間也較少,但是不好理解、不直觀;
3)旋轉矩陣法是最便於計算機處理的,但不可以直接插值、冗餘信息多、費存儲空間,同樣不直觀。所以,在機械人學中,一般人機交互端會用歐拉角,插值等用四元素,正逆運動學運算中用矩陣表示法。

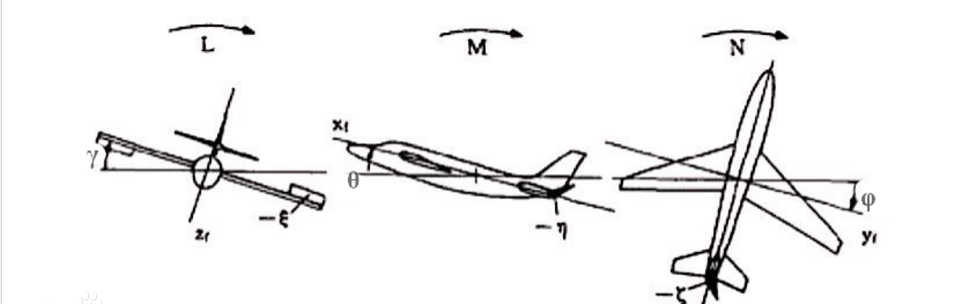
三、飛機姿態角控制
飛機主要藉助機翼和平尾上的舵面來實施操縱。通過副翼、升降舵和方向舵(ξ,η,ζ),可以產生繞縱軸、橫軸和豎軸(x,y,z)的力矩(L,M,N),藉助這些力矩,就可以改變飛機姿態角 
模型引用:
頭模型的姿態角,標註。自我感受一下,哈哈哈,如下圖所示
學習參考鏈接:
https://baike.baidu.com/item/%E9%A3%9E%E6%9C%BA%E5%A7%BF%E6%80%81%E8%A7%92/21517108?fr=aladdin
https://blog.csdn.net/sinolover/article/details/90671784
http://www.360doc.com/content/18/0101/17/42247147_718164461.shtml
ok,以上就是今天的學習筆記,如果有寫的不對的地方歡迎指正,謝謝~


