LibTorch | 使用神經網絡求解一維穩態對流擴散方程
0. 寫在前面
本文將使用基於LibTorch(PyTorch C++接口)的神經網絡求解器,對一維穩態對流擴散方程進行求解。研究問題參考自教科書\(^{[1]}\)示例 8.3。
1. 問題描述
一維穩態對流擴散方程為
\]
其中,均勻恆定速度 \(u=2.0 \mathrm{m/s}\) ,運動粘性係數 \(\Gamma = 0.03 \mathrm{m^2/s}\) ,源項 \(S\) 的形式後文將敘述。
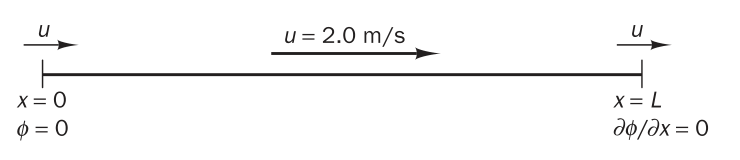
假設一維計算域長度為 \(L=1.5 \mathrm{m}\),其上分佈有均勻恆定速度場;待求物理量為 \(\phi\),邊界條件為左側(\(x=0\))處給定一類邊界條件(\(\phi=0\)),右側(\(x=L\))處給定二類邊界條件(\(\phi_{,x}=0\))。如下圖(圖片來自教科書\(^{[1]}\),圖8.7)所示。
在計算域上源項分佈如下圖(圖片來自教科書\(^{[1]}\),圖8.8)所示:

其中,\(a=-200\),\(b=100\),\(x_1=0.6\),\(x_2=0.2\)。
源項數學表達式如式(1)所示。
\begin{aligned}
-200 x + 100&, \ \ 0.0\leqslant x < 0.6 \\
100 x -80 &, \ \ 0.6 \leqslant x < 0.8 \\
0&, \ \ x \geqslant 0.8
\end{aligned}
\right . \tag1
\]
3. 解析解
上述一維穩態對流擴散方程存在解析解(參考文獻中公式直接計算數值不對,這裡做了一些修改,如果錯了還請讀者斧正):
+ \frac{a_0}{P^2}\left( Px +1\right)
+ \sum_{n=1}^{\infty} a_n\left(\frac{L}{n\pi}\right)
\frac{
P \sin\left(\frac{n\pi x}{L}\right) + \left(\frac{n\pi}{L}\right)\cos\left(\frac{n\pi x}{L}\right)
}
{
P^2 + \left(\frac{n\pi}{L}\right)^2
}
\]
其中,
P&=\frac{u}{\Gamma} \\
C_2&=\frac{a_0}{P^2\exp\left(PL\right)} +
\sum_{n=1}^{\infty} \frac{a_n\cos\left(n\pi\right)}
{\exp\left(PL\right)\left[P^2 + \left(\frac{n\pi}{L}\right)^2\right]}\\
C_1&= -C_2 + \frac{a_0}{P^2} +\sum_{n=1}^{\infty} \frac{a_n}{P^2 + \left(\frac{n\pi}{L}\right)^2} \\
a_0&= \frac{\left(x_1+x_2\right)\left(ax_1+b\right)+bx_1}{2L}\\
a_n&= \frac{2L}{n^2\pi^2}
\left\{
\left(\frac{a\left(x_1+x_2\right)+b}{x_2}\right)\cos\left(\frac{n\pi x_1}{L}\right)
–
\left[
a + \left(\frac{ax_1+b}{x_2}\right)
\cos\left(\frac{n\pi\left(x_1+x_2\right)}{L}\right)
\right]
\right\}\\
\end{aligned}
\]
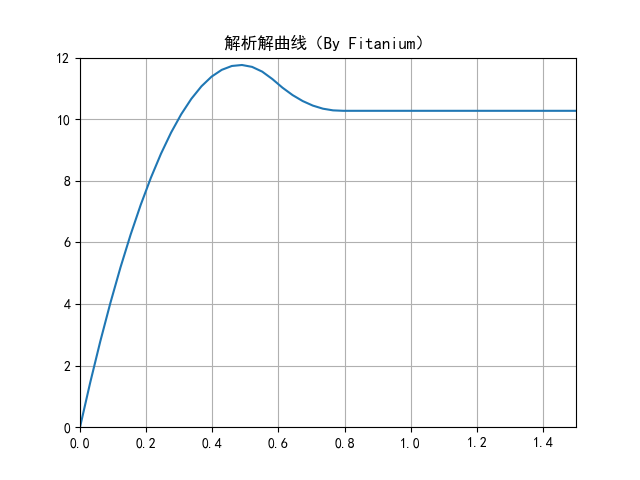
使用下面代碼繪製解析解曲線。
import math
import matplotlib.pyplot as plt
a = -200.0 # [1/m]
b = 100.0 # [1]
L = 1.5 # [m]
x_1 = 0.6 # [m]
x_2 = 0.2 # [m]
u = 2.0 # [m/s]
Gamma = 0.03 # [m^2/s]
P = u / Gamma # [1/m]
P2 = P * P # [1/m^2]
expPL = math.exp( P * L )
num_terms = 20000
def a_n(n):
if n == 0 :
return ( ( x_1 + x_2 ) * ( a * x_1 + b ) + b * x_1 ) / ( 2.0 * L )
else:
alpha = n * math.pi / L
term0 = 2.0 * L / n / n / math.pi / math.pi
term1 = ( a * ( x_1 + x_2 ) + b ) / x_2 * math.cos( alpha * x_1 )
term2 = a + ( a * x_1 + b ) / x_2 * math.cos( alpha * ( x_1 + x_2 ) )
return term0 * ( term1 - term2 )
def C2():
term0 = a_n(0) / P2 / expPL
term1 = 0.0
for i in range(1,num_terms + 1):
alpha = i * math.pi / L
coeff = ( P2 + alpha * alpha )
term1 += a_n(i) / expPL * math.cos( i * math.pi ) / coeff
return term0 + term1
def C1():
term0 = C2()
term1 = a_n(0) / P2
term2 = 0.0
for i in range(1,num_terms + 1):
alpha = i * math.pi / L
coeff = ( P2 + alpha * alpha )
term2 += a_n(i) / coeff
return -term0 + term1 + term2
def phi(x):
term0 = C1()
term1 = C2() * math.exp( P * x )
term2 = a_n(0) / P2 * ( P * x + 1.0 )
term3 = 0.0
for i in range(1,num_terms + 1):
alpha = i * math.pi / L
coeff = ( P2 + alpha * alpha )
term3 += a_n(i) / alpha * ( P * math.sin( alpha * x ) + alpha * math.cos( alpha * x ) ) / coeff
return term0 + term1 - term2 - term3
x = []
y = []
num_points = 50
for i in range(num_points):
x_ = L / ( num_points - 1 ) * i
x.append( x_ )
y.append( -phi(x_) * 0.75 * b / L / L ) # 這裡對參考文獻中的公式做了修改
plt.grid()
plt.xlim( 0, 1.5 )
plt.ylim( 0, 12 )
plt.plot( x, y )
plt.show()
圖像如下所示:
4. 神經網絡
上述流暢處於穩態時,物理量 \(\phi\) 是位置 \(x\) 的函數,即 \(\phi=f(x)\)。那麼我們這裡的想法就是利用神經網絡來表示這個函數,並通過利用機器學習方法(監督學習、自動微分)使該函數滿足控制方程和邊界條件。
對於上述關係,我們可以涉及類似下圖中這種全連接神經網絡(使用NN-SVG繪製)。
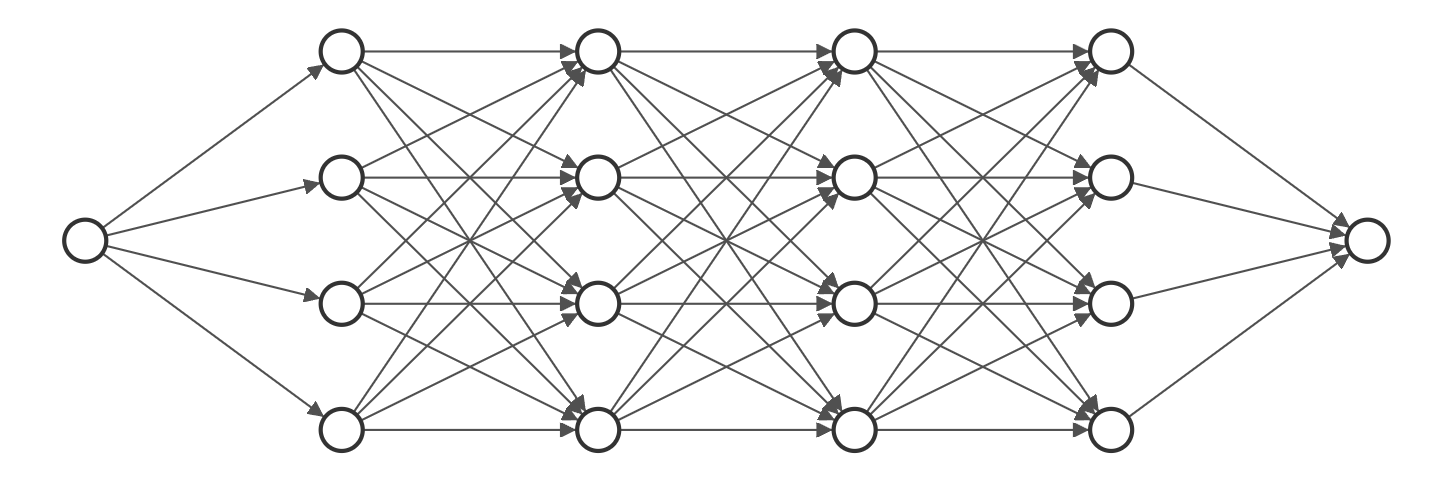
4.1 網絡結構
這裡我們設置了一個含有6層神經元的全連接神經網絡,形式如上圖所示,輸入層和輸出層均只有一個神經元,剩餘4個隱藏層每層含有256個神經元。
神經網絡類的聲明如下,保存在文件 nets.hpp 文件中,其中需要聲明向前傳播算法方法以及相關模塊變量。
#ifndef NETS_HPP
#define NETS_HPP
#include <torch\torch.h>
// 神經網絡類
class Net : public torch::nn::Module {
public:
Net(const int inDim, const int outDim);
torch::Tensor forward(at::Tensor x);
private:
torch::nn::Linear input{nullptr};
torch::nn::Linear hidden0{nullptr};
torch::nn::Linear hidden1{nullptr};
torch::nn::Linear hidden2{nullptr};
torch::nn::Linear output{nullptr};
};
#endif // NETS_HPP
接下來看一下神經網絡的實現,我們將其實現保存在 nets.cpp 文件中,其中構造函數中將初始化這些模塊變量;forward 方法為向前傳播的實現,數據傳播過程為 \(1\to 256\to 256\to 256\to 256\to 1\),網絡接受一個標量輸入並最終返回一個標量輸出;另外隱藏層全部採用 tanh 函數作為激活函數。
#include "nets.hpp"
Net::Net(const int inDim, const int outDim) {
input = register_module("input", torch::nn::Linear(inDim, 256));
hidden0 = register_module("hidden0", torch::nn::Linear(256, 256));
hidden1 = register_module("hidden1", torch::nn::Linear(256, 256));
hidden2 = register_module("hidden2", torch::nn::Linear(256, 256));
output = register_module("output", torch::nn::Linear(256, outDim));
}
torch::Tensor Net::forward(at::Tensor x) {
// 輸入層 : 1 --> 隱藏層 0 : 256
torch::Tensor phi = input->forward(x);
phi = torch::tanh(phi); // 激活函數
// 隱藏層 0 : 256 --> 隱藏層 1 : 256
phi = hidden0->forward(phi);
phi = torch::tanh(phi); // 激活函數
// 隱藏層 1 : 256 --> 隱藏層 2 : 256
phi = hidden1->forward(phi);
phi = torch::tanh(phi); // 激活函數
// 隱藏層 2 : 256 --> 隱藏層 3 : 256
phi = hidden2->forward(phi);
phi = torch::tanh(phi); // 激活函數
// 隱藏層 3 : 256 --> 輸出層 : 1
phi = output->forward(phi);
//
return phi;
}
4.2 源項代碼
分佈源項為分段函數,這塊比較簡單,直接給出頭文件和實現。
函數聲明保存在 utils.hpp 文件中。
#ifndef UTILS_HPP
#define UTILS_HPP
float Source(const float x);
#endif // UTILS_HPP
函數實現保存在 utils.cpp 文件中。
#include "utils.hpp"
float Source(const float x) {
if (x < 0.6) {
return -200.0 * x + 100.0;
} else if (x > 0.8) {
return 0.0;
} else {
return 100.0 * x - 80.0;
}
}
4.3 訓練代碼
這裡,我們將訓練代碼保存在 main.cpp 文件中。由於空間位置不變,我們在迭代訓練外構造輸入參數。
A(開始) –> B[構造輸入]
B[構造輸入] –> C[初始化神經網絡和優化器]
C[初始化神經網絡和優化器] –> D[迭代訓練]
D[迭代訓練] –> E[向前傳播]
E[向前傳播] –> F[構造損失函數]
F[構造損失函數] –> G[反向傳播]
G[反向傳播] –> H[更新參數]
H[更新參數] –> I[判斷收斂]
I[判斷收斂] –> J{是否收斂}
J{是否收斂} — 是 –> K(結束)
J{是否收斂} — 否 –> D[迭代訓練]
代碼實現如下所示,其中計算PDE的損失時用到了自動微分,可參考筆者之前的隨筆LibTorch 自動微分。
#include <fstream>
#include <iomanip>
#include <iostream>
#include <string>
#include "nets.hpp"
#include "utils.hpp"
int main(int argc, char *atgv[]) {
std::cout << std::scientific << std::setprecision(7);
const double L = 1.5; // 計算域長度
const int numElement = 20; // 輸入點個數
// 構造輸入,維度為[N,1],N行,每行為一個輸入,維度為1
std::vector<float> x;
for (int i = 0; i < numElement; ++i) {
x.push_back(L / double(numElement - 1) * double(i));
}
torch::Tensor xT = torch::from_blob(x.data(), {numElement, 1}, torch::kFloat)
.requires_grad_(true);
// 初始化神經網絡和隨機梯度下降優化器
std::shared_ptr<Net> net = std::make_shared<Net>(1, 1);
std::shared_ptr<torch::optim::SGD> optimizer =
std::make_shared<torch::optim::SGD>(net->parameters(), 1.e-4);
// 開始迭代訓練
double lossVal = 10;
int epochIdx = 0;
std::vector<float> sol(numElement);
while (lossVal > 1.e-3) {
// 向前傳播,最終輸出是一個[N,1]的輸出
torch::Tensor out = net->forward(xT);
// 構造損失函數(由3部分組成,PDE和兩側邊界條件)
auto ones = torch::ones_like(out);
torch::Tensor ddx =
torch::autograd::grad({out}, {xT}, {ones}, true, true, false)[0];
torch::Tensor d2dx2 =
torch::autograd::grad({ddx}, {xT}, {ones}, true, true, false)[0];
auto sourceTerm = torch::zeros_like(out);
for (int i = 0; i < numElement; ++i) {
sourceTerm[i][0] = Source(xT[i][0].item<float>());
}
auto pde = 2.0 * ddx - 0.03 * d2dx2;
auto pdeLoss = torch::mse_loss(pde, sourceTerm); // 偏微分方程
auto tag1 = torch::zeros_like(out);
for (int i = 0; i < numElement; ++i) {
if (i == 0) {
tag1[i][0] = 0.0;
} else {
tag1[i][0] = out[i][0].item<float>();
}
}
auto bndLoss1 = torch::mse_loss(out, tag1); // 左側邊界條件
auto tag2 = torch::zeros_like(ddx);
for (int i = 0; i < numElement; ++i) {
if (i == numElement - 1) {
tag2[i][0] = 0.0;
} else {
tag2[i][0] = ddx[i][0].item<float>();
}
}
auto bndLoss2 = torch::mse_loss(ddx, tag2); // 右側邊界條件
auto totalLoss = pdeLoss + bndLoss1 + bndLoss2;
// 反向傳播
optimizer->zero_grad();
totalLoss.backward();
optimizer->step();
// 打印日誌
lossVal = totalLoss.item<float>();
std::cout << "PDE_LOSS: " << pdeLoss.item<float>()
<< ", BND_LOSS1: " << bndLoss1.item<float>()
<< ", BND_LOSS2: " << bndLoss2.item<float>()
<< ", TOTAL_LOSS: " << lossVal << ", EPOCH.IDX: " << epochIdx
<< std::endl;
epochIdx += 1;
for (int i = 0; i < numElement; ++i) {
sol[i] = out[i][0].item<float>();
}
}
// 保存結果
std::ofstream os;
os.open("solution.txt", std::ios::out);
for (int i = 0; i < numElement; ++i) {
os << x[i] << " " << sol[i] << std::endl;
}
os.close();
return 0;
}
4.4 CMakeLists.txt
這裡使用 CMake 管理程序代碼,內容如下所示。
cmake_minimum_required( VERSION 3.8 )
project( LibTorch)
set( CMAKE_CXX_STANDARD 14 )
set( INSTALL_PREFIX "D:/SoftwarePackage" )
## LibTorch
find_package(Torch REQUIRED PATHS "${INSTALL_PREFIX}/libtorch/share/cmake/Torch")
link_directories( "${INSTALL_PREFIX}/libtorch/lib" )
# My own code
include_directories( . )
set(SRCS
nets.cpp
utils.cpp
)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} ${TORCH_CXX_FLAGS}" )
add_executable ( ${PROJECT_NAME} main.cpp ${SRCS} )
target_link_libraries(${PROJECT_NAME} ${TORCH_LIBRARIES} )
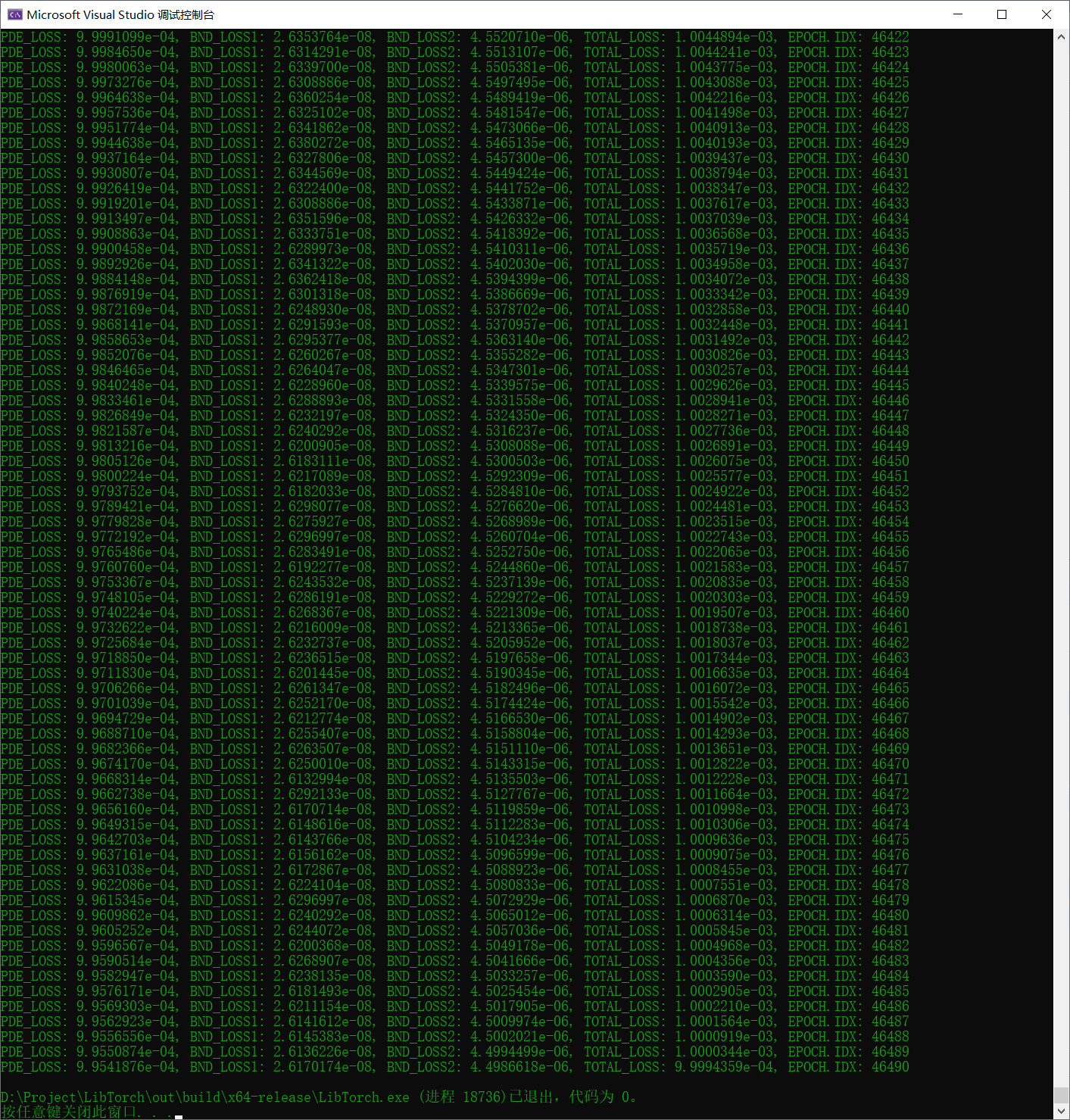
5. 結果處理
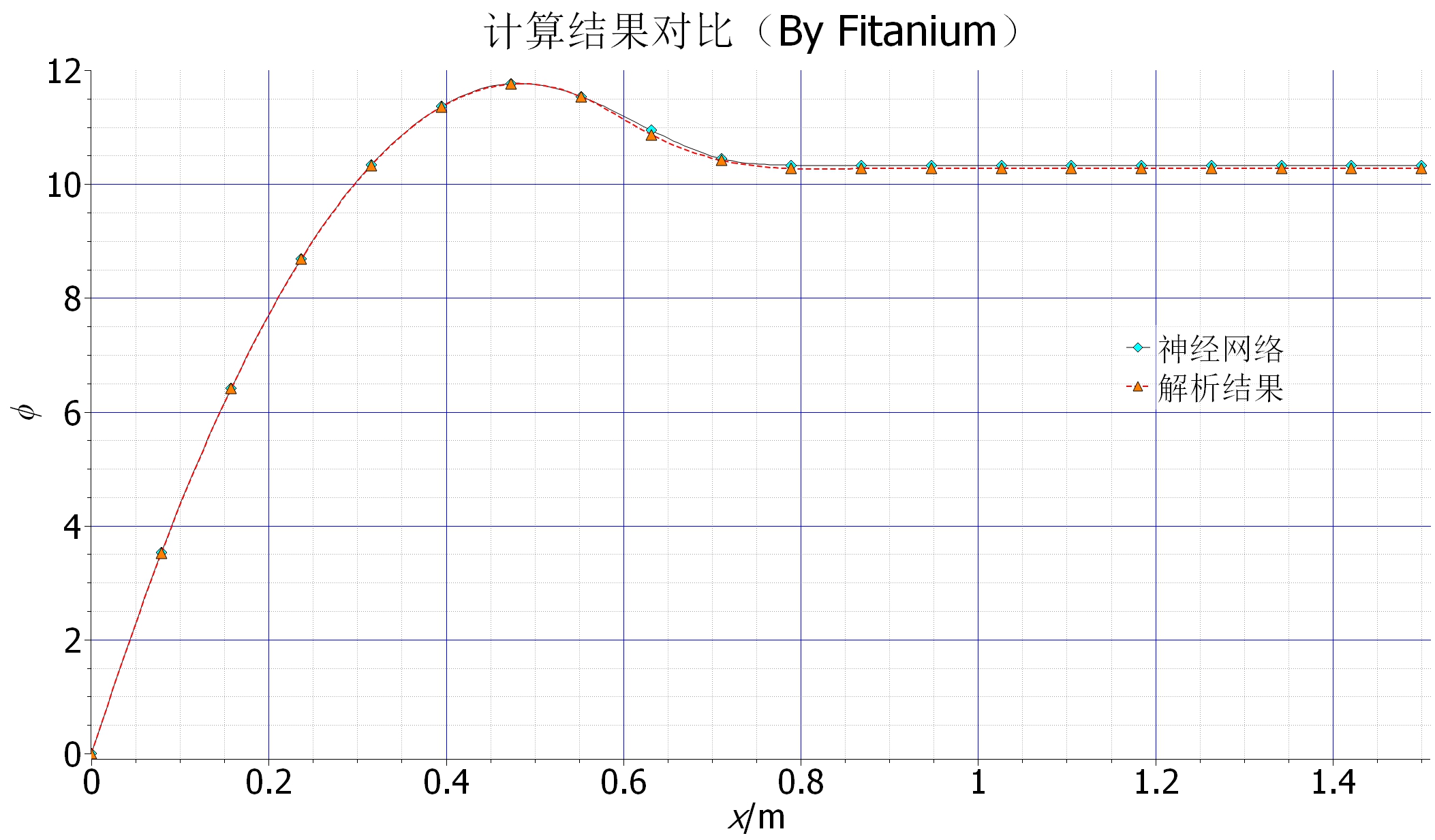
神經網絡訓練了近4萬6千多次才滿足收斂標準,其實還是挺慢的。其中誤差最主要來自於神經網絡無法滿足偏微分方程(PDE),這和很多因素有關,比如網絡結構,收斂判據等。
從下圖數值結果來看,訓練的神經網絡給出的結果與解析解能夠較好吻合,後段有一個明顯的誤差,但是相對較小,這個誤差應該來自網絡本身,網絡結構簡單,改進空間應該還是比較大。
本文寫的比較簡單,也沒有使用批訓練。此外,感興趣的小夥伴可以嘗試使用OpenFOAM求解,可參考筆者之前的隨筆 OpenFOAM 編程 | One-Dimensional Transient Heat Conduction 。
參考文獻
[1] H. Versteeg , W. Malalasekera. Introduction to Computational Fluid Dynamics, An: The Finite Volume Method 2nd Edition[M]. Pearson. 2007.


