Linux驅動實踐:如何編寫【 GPIO 】設備的驅動程序?

作 者:道哥,10+年嵌入式開發老兵,專註於:C/C++、嵌入式、Linux。
關注下方公眾號,回復【書籍】,獲取 Linux、嵌入式領域經典書籍;回復【PDF】,獲取所有原創文章( PDF 格式)。
目錄
別人的經驗,我們的階梯!
大家好,我是道哥。
在前幾篇文章中,我們一塊討論了:在 Linux 系統中,編寫字符設備驅動程序的基本框架,主要是從代碼流程和 API 函數這兩方面觸發。
這篇文章,我們就以此為基礎,寫一個有實際應用功能的驅動程序:
在驅動程序中,初始化 GPIO 設備,自動創建設備節點;
在應用程序中,打開 GPIO 設備,並發送控制指令設置 GPIO 口的狀態;
示例程序目標
編寫一個驅動程序模塊:mygpio.ko。
當這個驅動模塊被加載的時候,在系統中創建一個 mygpio 類設備,並且在 /dev 目錄下,創建 4 個設備節點:
/dev/mygpio0
/dev/mygpio1
/dev/mygpio2
/dev/mygpio3
因為我們現在是在 x86 平台上來模擬 GPIO 的控制操作,並沒有實際的 GPIO 硬件設備。
因此,在驅動代碼中,與硬件相關部分的代碼,使用宏 MYGPIO_HW_ENABLE 控制起來,並且在其中使用printk輸出打印信息來體現硬件的操作。
在應用程序中,可以分別打開以上這 4 個 GPIO 設備,並且通過發送控制指令,來設置 GPIO 的狀態。
編寫驅動程序
以下所有操作的工作目錄,都是與上一篇文章相同的,即:
~/tmp/linux-4.15/drivers/。
創建驅動目錄和驅動程序
$ cd linux-4.15/drivers/
$ mkdir mygpio_driver
$ cd mygpio_driver
$ touch mygpio.c
mygpio.c 文件的內容如下(不需要手敲,文末有代碼下載鏈接):
#include <linux module.h="">
#include <linux kernel.h="">
#include <linux ctype.h="">
#include <linux device.h="">
#include <linux cdev.h="">
// GPIO 硬件相關宏定義
#define MYGPIO_HW_ENABLE
// 設備名稱
#define MYGPIO_NAME "mygpio"
// 一共有4個 GPIO 口
#define MYGPIO_NUMBER 4
// 設備類
static struct class *gpio_class;
// 用來保存設備
struct cdev gpio_cdev[MYGPIO_NUMBER];
// 用來保存設備號
int gpio_major = 0;
int gpio_minor = 0;
#ifdef MYGPIO_HW_ENABLE
// 硬件初始化函數,在驅動程序被加載的時候(gpio_driver_init)被調用
static void gpio_hw_init(int gpio)
{
printk("gpio_hw_init is called: %d. \n", gpio);
}
// 硬件釋放
static void gpio_hw_release(int gpio)
{
printk("gpio_hw_release is called: %d. \n", gpio);
}
// 設置硬件GPIO的狀態,在控制GPIO的時候(gpio_ioctl)被調研
static void gpio_hw_set(unsigned long gpio_no, unsigned int val)
{
printk("gpio_hw_set is called. gpio_no = %ld, val = %d. \n", gpio_no, val);
}
#endif
// 當應用程序打開設備的時候被調用
static int gpio_open(struct inode *inode, struct file *file)
{
printk("gpio_open is called. \n");
return 0;
}
// 當應用程序控制GPIO的時候被調用
static long gpio_ioctl(struct file* file, unsigned int val, unsigned long gpio_no)
{
printk("gpio_ioctl is called. \n");
// 檢查設置的狀態值是否合法
if (0 != val && 1 != val)
{
printk("val is NOT valid! \n");
return 0;
}
// 檢查設備範圍是否合法
if (gpio_no >= MYGPIO_NUMBER)
{
printk("dev_no is invalid! \n");
return 0;
}
printk("set GPIO: %ld to %d. \n", gpio_no, val);
#ifdef MYGPIO_HW_ENABLE
// 操作 GPIO 硬件
gpio_hw_set(gpio_no, val);
#endif
return 0;
}
static const struct file_operations gpio_ops={
.owner = THIS_MODULE,
.open = gpio_open,
.unlocked_ioctl = gpio_ioctl
};
static int __init gpio_driver_init(void)
{
int i, devno;
dev_t num_dev;
printk("gpio_driver_init is called. \n");
// 動態申請設備號(嚴謹點的話,應該檢查函數返回值)
alloc_chrdev_region(&num_dev, gpio_minor, MYGPIO_NUMBER, MYGPIO_NAME);
// 獲取主設備號
gpio_major = MAJOR(num_dev);
printk("gpio_major = %d. \n", gpio_major);
// 創建設備類
gpio_class = class_create(THIS_MODULE, MYGPIO_NAME);
// 創建設備節點
for (i = 0; i < MYGPIO_NUMBER; ++i)
{
// 設備號
devno = MKDEV(gpio_major, gpio_minor + i);
// 初始化 cdev 結構
cdev_init(&gpio_cdev[i], &gpio_ops);
// 註冊字符設備
cdev_add(&gpio_cdev[i], devno, 1);
// 創建設備節點
device_create(gpio_class, NULL, devno, NULL, MYGPIO_NAME"%d", i);
}
#ifdef MYGPIO_HW_ENABLE
// 初始化 GPIO 硬件
for (i = 0; i < MYGPIO_NUMBER; ++i)
{
gpio_hw_init(i);
}
#endif
return 0;
}
static void __exit gpio_driver_exit(void)
{
int i;
printk("gpio_driver_exit is called. \n");
// 刪除設備和設備節點
for (i = 0; i < MYGPIO_NUMBER; ++i)
{
cdev_del(&gpio_cdev[i]);
device_destroy(gpio_class, MKDEV(gpio_major, gpio_minor + i));
}
// 釋放設備類
class_destroy(gpio_class);
#ifdef MYGPIO_HW_ENABLE
// 釋放 GPIO 硬件
for (i = 0; i < MYGPIO_NUMBER; ++i)
{
gpio_hw_release(i);
}
#endif
// 註銷設備號
unregister_chrdev_region(MKDEV(gpio_major, gpio_minor), MYGPIO_NUMBER);
}
MODULE_LICENSE("GPL");
module_init(gpio_driver_init);
module_exit(gpio_driver_exit);
相對於前幾篇文章來說,上面的代碼稍微有一點點複雜,主要是多了宏定義 MYGPIO_HW_ENABLE 控制部分的代碼。
比如:在這個宏定義控制下的三個與硬件相關的函數:
gpio_hw_init()
gpio_hw_release()
gpio_hw_set()
就是與GPIO硬件的初始化、釋放、狀態設置相關的操作。
代碼中的注釋已經比較完善了,結合前幾篇文章中的函數說明,還是比較容易理解的。
從代碼中可以看出:驅動程序使用 alloc_chrdev_region 函數,來動態註冊設備號,並且利用了 Linux 應用層中的 udev 服務,自動在 /dev 目錄下創建了設備節點。
另外還有一點:在上面示例代碼中,對設備的操作函數只實現了 open 和 ioctl 這兩個函數,這是根據實際的使用場景來決定的。
這個示例中,只演示了如何控制 GPIO 的狀態。
你也可以稍微補充一下,增加一個read函數,來讀取某個GPIO口的狀態。
控制 GPIO 設備,使用 write 或者 ioctl 函數都可以達到目的,只是 ioctl 更靈活一些。
創建 Makefile 文件
$ touch Makefile
內容如下:
ifneq ($(KERNELRELEASE),)
obj-m := mygpio.o
else
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
PWD := $(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
$(MAKE) -C $(KERNEL_PATH) M=$(PWD) clean
endif
編譯驅動模塊
$ make
得到驅動程序: mygpio.ko 。
加載驅動模塊
在加載驅動模塊之前,先來檢查一下系統中,幾個與驅動設備相關的地方。
先看一下 /dev 目錄下,目前還沒有設備節點( /dev/mygpio[0-3] )。
$ ls -l /dev/mygpio*
ls: cannot access '/dev/mygpio*': No such file or directory
再來查看一下 /proc/devices 目錄下,也沒有 mygpio 設備的設備號。
$ cat /proc/devices
為了方便查看打印信息,把dmesg輸出信息清理一下:
$ sudo dmesg -c
現在來加載驅動模塊,執行如下指令:
$ sudo insmod mygpio.ko
當驅動程序被加載的時候,通過 module_init( ) 註冊的函數 gpio_driver_init() 將會被執行,那麼其中的打印信息就會輸出。
還是通過 dmesg 指令來查看驅動模塊的打印信息:
$ dmesg

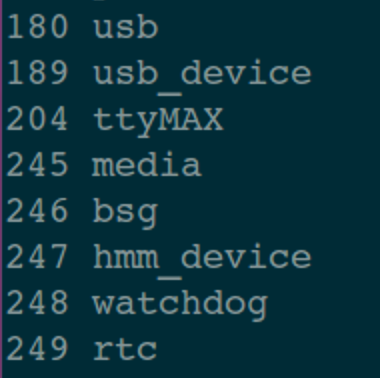
可以看到:操作系統為這個設備分配的主設備號是 244,並且也打印了GPIO硬件的初始化函數的調用信息。
此時,驅動模塊已經被加載了!
來查看一下 /proc/devices 目錄下顯示的設備號:
$ cat /proc/devices

設備已經註冊了,主設備號是: 244 。
設備節點
由於在驅動程序的初始化函數中,使用 cdev_add 和 device_create 這兩個函數,自動創建設備節點。
所以,此時我們在 /dev 目錄下,就可以看到下面這4個設備節點:
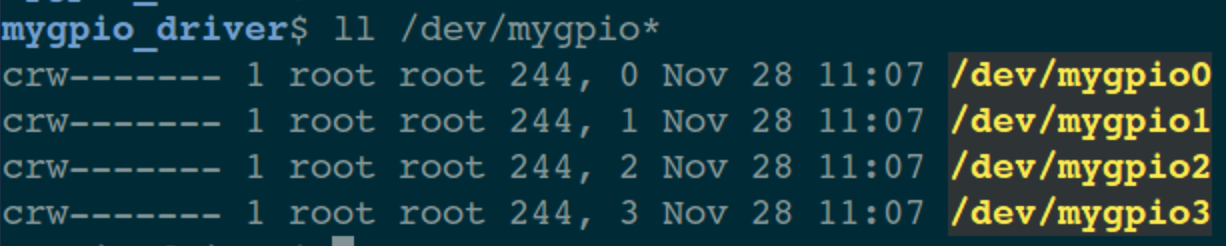
現在,設備的驅動程序已經加載了,設備節點也被創建好了,應用程序就可以來控制 GPIO 硬件設備了。
應用程序
應用程序仍然放在 ~/tmp/App/ 目錄下。
$ mkdir ~/tmp/App/app_mygpio
$ cd ~/tmp/App/app_mygpio
$ touch app_mygpio.c
文件內容如下:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <assert.h>
#include <fcntl.h>
#include <sys ioctl.h="">
#define MY_GPIO_NUMBER 4
// 4個設備節點
char gpio_name[MY_GPIO_NUMBER][16] = {
"/dev/mygpio0",
"/dev/mygpio1",
"/dev/mygpio2",
"/dev/mygpio3"
};
int main(int argc, char *argv[])
{
int fd, gpio_no, val;
// 參數個數檢查
if (3 != argc)
{
printf("Usage: ./app_gpio gpio_no value \n");
return -1;
}
gpio_no = atoi(argv[1]);
val = atoi(argv[2]);
// 參數合法性檢查
assert(gpio_no < MY_GPIO_NUMBER);
assert(0 == val || 1 == val);
// 打開 GPIO 設備
if((fd = open(gpio_name[gpio_no], O_RDWR | O_NDELAY)) < 0){
printf("%s: open failed! \n", gpio_name[gpio_no]);
return -1;
}
printf("%s: open success! \n", gpio_name[gpio_no]);
// 控制 GPIO 設備狀態
ioctl(fd, val, gpio_no);
// 關閉設備
close(fd);
}
以上代碼也不需要過多解釋,只要注意參數的順序即可。
接下來就是編譯和測試了:
$ gcc app_mygpio.c -o app_mygpio
執行應用程序的時候,需要攜帶2個參數:GPIO 設備編號(0 ~ 3),設置的狀態值(0 或者 1)。
這裡設置一下/dev/mygpio0這個設備,狀態設置為1:
$ sudo ./app_mygpio 0 1
[sudo] password for xxx: <輸入用戶密碼>
/dev/mygpio0: open success!
如何確認/dev/mygpio0這個GPIO的狀態確實被設置為1了呢?當然是看 dmesg 指令的打印信息:
$ dmesg

通過打印信息可以看到:確實執行了【設置 mygpio0 的狀態為 1】的動作。
再繼續測試一下:設置 mygpio0 的狀態為 0:
$ sudo ./app_mygpio 0 0

當然了,設置其他幾個GPIO口的狀態,都是可以正確執行的!
卸載驅動模塊
卸載指令:
$ sudo rmmod mygpio
此時,/proc/devices 下主設備號 244 的 mygpio 已經不存在了。

再來看一下 dmesg的打印信息:

可以看到:驅動程序中的 gpio_driver_exit( ) 被調用執行了。
並且,/dev 目錄下的 4 個設備節點,也被函數 device_destroy() 自動刪除了!
—— End ——
文中的測試代碼,已經放在網盤了。
在公眾號【IOT物聯網小鎮】後台回復關鍵字:1128,即可獲取下載地址。
謝謝!
推薦閱讀
【2】C語言指針-從底層原理到花式技巧,用圖文和代碼幫你講解透徹

星標公眾號,第一時間看文章!
 </fcntl.h></assert.h></unistd.h></stdlib.h></stdio.h>
</fcntl.h></assert.h></unistd.h></stdlib.h></stdio.h>


