ConcurrentHashMap源碼解析,多線程擴容
前面一篇已經介紹過了 HashMap 的源碼:
HashMap源碼解析、jdk7和8之後的區別、相關問題分析
HashMap並不是線程安全的,他就一個普通的容器,沒有做相關的同步處理,因此線程不安全主要體現在:
- put、get 等等核心方法在多線程情況下,都會出現修改的覆蓋,數據不一致等等問題。比如多個線程 put 先後的問題,會導致結果覆蓋,如果一個 put 一個get,也可能會因為調度問題獲取到錯誤的結果;
- 多線程操作有讀有寫的時候,可能會出現一個典型異常:ConcurrentModificationException
- 另外擴容的時候,hashmap1.7 的實現還有可能出現死循環的問題。
關於線程安全的哈希映射的選擇有三種:
- Hashtable;
- SynchronizedMap對HashMap包裝;
- ConcurrentHashMap
- 其中,Hashtable 的效率比較低,因為他的每一個方法都是用了鎖,synchronized 修飾的;
- 用 SynchronizedMap 對 HashMap 包裝的實質也是額外加入一個對象叫做 mutex,是一個 Object,然後給對應的方法上都加上 synchronized(mutex),當然比 Hashtable 是要好一些的,因為鎖對象粒度要小一些。Hashtable 採用的 synchronized 鎖上方法鎖定的是整個 this。
ConcurrentHashMap則是最好的選擇,這裡我們來看看他的源碼原理。
一、ConcurrentHashMap 數據結構
其實可以想見,一個功能完全一致的容器,和原來的 HashMap 相比,肯定結構不會差到哪裡去,實際上也是這樣。jdk8之後 HashMap 引入紅黑樹的優化,ConcurrentHashMap 也有,所以我們還是分 7 和 8 來說:
1.1 jdk 7 的 ConcurrentHashMap
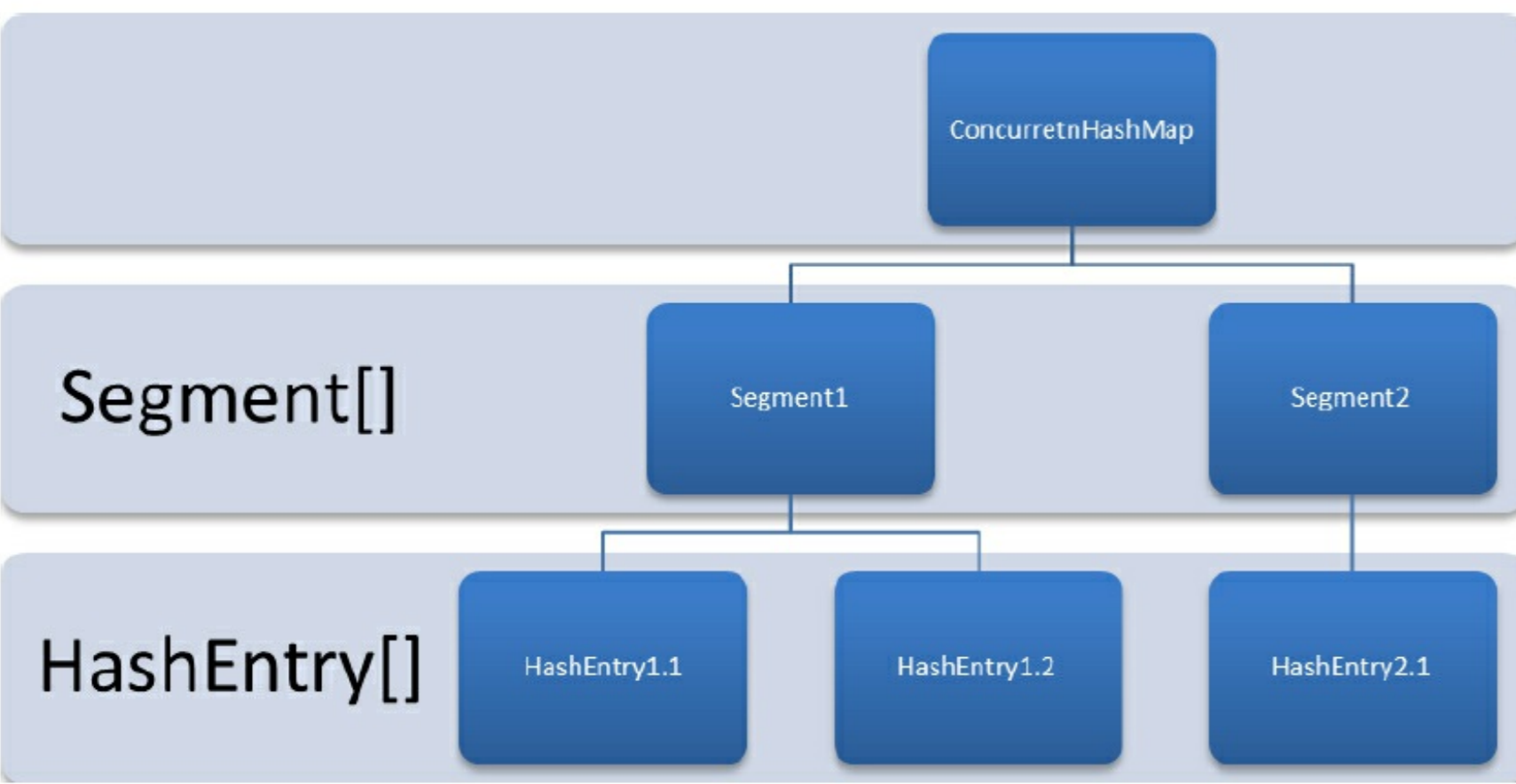
由 Segment 片段,HashEntry組成,和HashMap一樣,仍然是枚舉鏈表。
- 很簡單,就是 Segment 數組又分成了 HashEntry 類型的數組。
- 那 Segment 類型是什麼呢?這個內部類維護的就是HashEntry 類型的數組。
- HashEntry 是什麼呢?就是鏈表。
所以其實首先在容器存儲的核心結構上,把當時對應的 HashMap 分成了更細的粒度。
與此同時,Segment 數組是繼承了 ReentrantLock 的,再往下層 HashEntry 類型的數組 table 和 HashEntry 這個鏈表節點都是用 volatile 修飾的。
1.2 jdk 8 的 ConcurrentHashMap
顯然是因為 jdk 8 的 HashMap 更新了結構,所以對應的 ConcurrentHashMap 也在這方面跟着改變了。

jdk 8 的實現已經摒棄了 Segment 的概念,而是直接用Node數組+鏈表+紅黑樹,和 HashMap 一模一樣的數據結構來實現,雖然源碼里還能看到Segment的數據結構,但是已經簡化了屬性,只是為了兼容舊版本。
對應的,不再是 Entry 而是 Node 節點,就是因為要轉樹,對應的方法操作,最重要的就是沒有顯式的再使用 ReentrantLock,用到了 synchronized 和 CAS 操作,Node 節點也是 volatile 修飾的。
二、ConcurrentHashMap 的內部方法
2.1 jdk7 的 put ,get ,擴容方法
這裡沒有源碼的截圖,但是過程是清晰的。
put 方法(加鎖):
- 將當前 Segment 中的表通過 key 的哈希碼定位到HashEntry。這一步會嘗試獲取鎖,如果獲取失敗肯定存在其他線程存在競爭,則利用 scanAndLockForPut() 方法去獲取鎖。
- 遍歷該 HashEntry,如果不為空則判斷預定的 key 和當前遍歷的 key 是否替代,替代則覆蓋舊的值。
- 不為空則需要新建一個 HashEntry 並加入到 Segment 中,同時會先判斷是否需要擴容。
- 最後會解除在 1 中所獲取當前Segment的鎖。
可以看到,整體就是獲取鎖的中間進行 put 操作,put 操作的流程也和 HashMap 的 put 是類似的。
get 方法(不加鎖):
ConcurrentHashMap 的 get 操作跟 HashMap 類似,只是ConcurrentHashMap 第一次需要經過一次 hash 定位到 Segment 的位置,然後再 hash 定位到指定的 HashEntry,遍歷該 HashEntry 下的鏈表進行對比,成功就返回,不成功就返回 null。
並且 get 的過程調用的是 Unsafe 包的 getObjectVolatile 方法,因為具體的對象是 volatile 修飾的,不用加鎖,讀取也可以直接讀到最新的值。
rehash 方法(加鎖):
ConcurrentHashMap 的擴容方法和 HashMap 也是類似的,因為外部已經對 Segment 加鎖,內部的操作就是重新計算 hash 值,然後重新移動元素。
這裡可以看出來,因為有 Segment 的一個粒度縮小的優化,加上一個讀寫分離的普遍思想,jdk 7 實現的方法比較容易理解。
下來的 jdk 8 做出的優化非常多,因此幾個方法分開來講
2.2 jdk 8 的初始化
構造方法和 HashMap 一樣,是不會初始化的,而是在第一次調用 put 方法之後才會進行初始化。構造方法調用的時候只是進行了一些參數的確定。
因此我們可以先看一下ConcurrentHashMap 裏面的比較重要的參數:
//最大容量
private static final int MAXIMUM_CAPACITY = 1 << 30;
//默認初始化容量
private static final int DEFAULT_CAPACITY = 16;
//負載因子
private static final float LOAD_FACTOR = 0.75f;
//鏈錶轉為紅黑樹的臨界值
static final int TREEIFY_THRESHOLD = 8;
//紅黑樹轉為鏈表的臨界值
static final int UNTREEIFY_THRESHOLD = 6;
//當容量大於64時,鏈表才會轉為紅黑樹,否則,即便鏈表長度大於8,也不會轉,而是會擴容
static final int MIN_TREEIFY_CAPACITY = 64;
可以看到,以上的幾個屬性和 HashMap 一模一樣,除此之外,比較重要的一個參數就是:
private transient volatile int sizeCtl;
在計算出數組長度、也就是裝整個 Map 的那個 Node[] table 的長度之後,是賦值給 sizeCtl 這個元素的。
如果說使用無參構造,那麼初始化的時候,sizeCtl 會是 16,其他的情況會計算成為一個 2 的冪次方數,也和 HashMap 是一樣的。另外,sizeCtl 這個參數的值還有別的含義:
-
負數代表正在進行初始化或擴容操作
- -1代表正在初始化
- -N 表示,這個高16位表示當前擴容的標誌,每次擴容都會生成一個不一樣的標誌,低16位表示參與擴容的線程數量
-
正數或 0,0 代表 hash 表那個數組還沒有被初始化,正數表示達到這個值需要擴容(擴容閾值,其實就等於(容量 * 負載因子),也就是數組長度*0.75)。
還有一部分基本是和擴容相關的屬性,第一眼看過去可能不能理解這些什麼時候會用,下面講到擴容方法的時候就會用到:
//擴容相關,每個線程負責最小桶個數
private static final int MIN_TRANSFER_STRIDE = 16;
//擴容相關,為了計算sizeCtl
private static int RESIZE_STAMP_BITS = 16;
//最大輔助擴容線程數量
private static final int MAX_RESIZERS = (1 << (32 - RESIZE_STAMP_BITS)) - 1;
//擴容相關,為了計算sizeCtl
private static final int RESIZE_STAMP_SHIFT = 32 - RESIZE_STAMP_BITS;
//下面幾個是狀態值
//MOVED表示正在擴容
static final int MOVED = -1; // hash for forwarding nodes
//-2表示紅黑樹標識
static final int TREEBIN = -2; // hash for roots of trees
static final int RESERVED = -3; // hash for transient reservations
//計算Hash值使用
static final int HASH_BITS = 0x7fffffff; // usable bits of normal node hash
//可用CPU核數
static final int NCPU = Runtime.getRuntime().availableProcessors();
//用於記錄容器中插入的元素數量
private transient volatile long baseCount;
2.3 jdk 8 的 put() 方法
和 jdk 8 的 HashMap 方法一樣,直接調用的是 putVal 方法去執行。
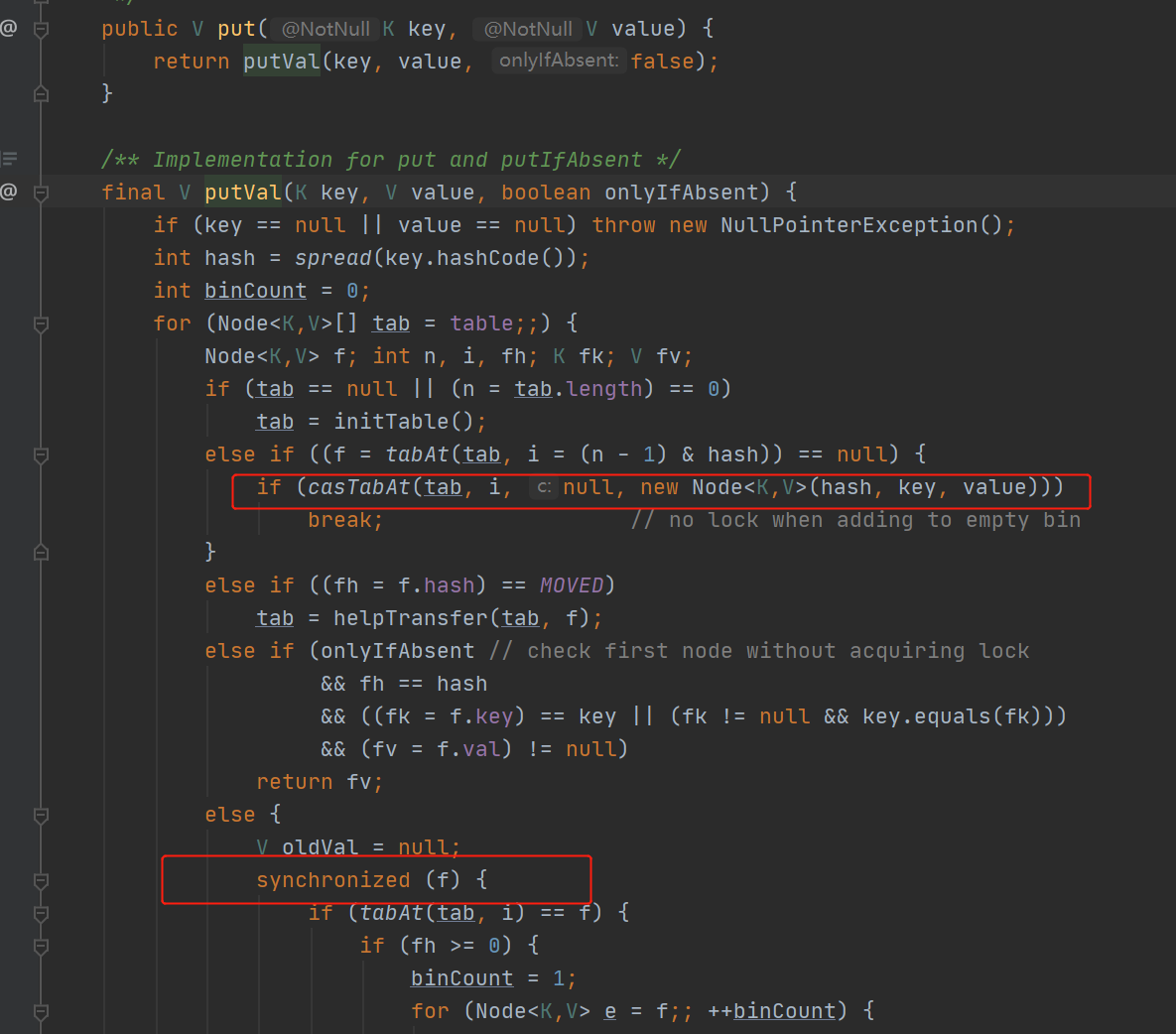
- 計算出 hash。(hash值的計算是通過hashCode進行spread方法的再次計算,一定是一個正數,也是後面再次計算取模得到在table中位置的依據)
- 判斷是否需要進行初始化,也就是第一次put 的時候將容器進行初始化,初始化調用的是 initTable 方法。(這個方法裏面利用到了上面的 sizeCtl 參數,通過 CAS 操作來判斷是不是有別的線程同時在做初始化,保證只有一個線程在做初始化的操作,沒有加鎖)
- f 即為當前 key 定位出的 Node,node 的位置就是通過括號裏面的 tabAt 計算的,如果為空表示當前位置,也就是數組的這個位置是個空,可以寫入數據。也是利用 CAS 嘗試寫入,失敗則自旋保證成功,可以看到這裡,因為定位到的那個 Node 是個空鏈表,所以就直接利用了 CAS 操作(也沒有加鎖)
- 那如果不是空,就進行到下面的 else if,如果判斷哈希值 == MOVED,代表數組正在擴容,那麼就會進行 helperTransfer 方法進行協助擴容,因為沒辦法繼續put了
- 否則進入下一個 else if ,這裡是jdk11有,但是8是沒有的,這裡用到了OnlyIfAbsent變量,實現的是而 putIfAbsent,也就是在放入數據時,如果存在重複的key,那麼putIfAbsent不會放入值(並不像put 那樣覆蓋)。
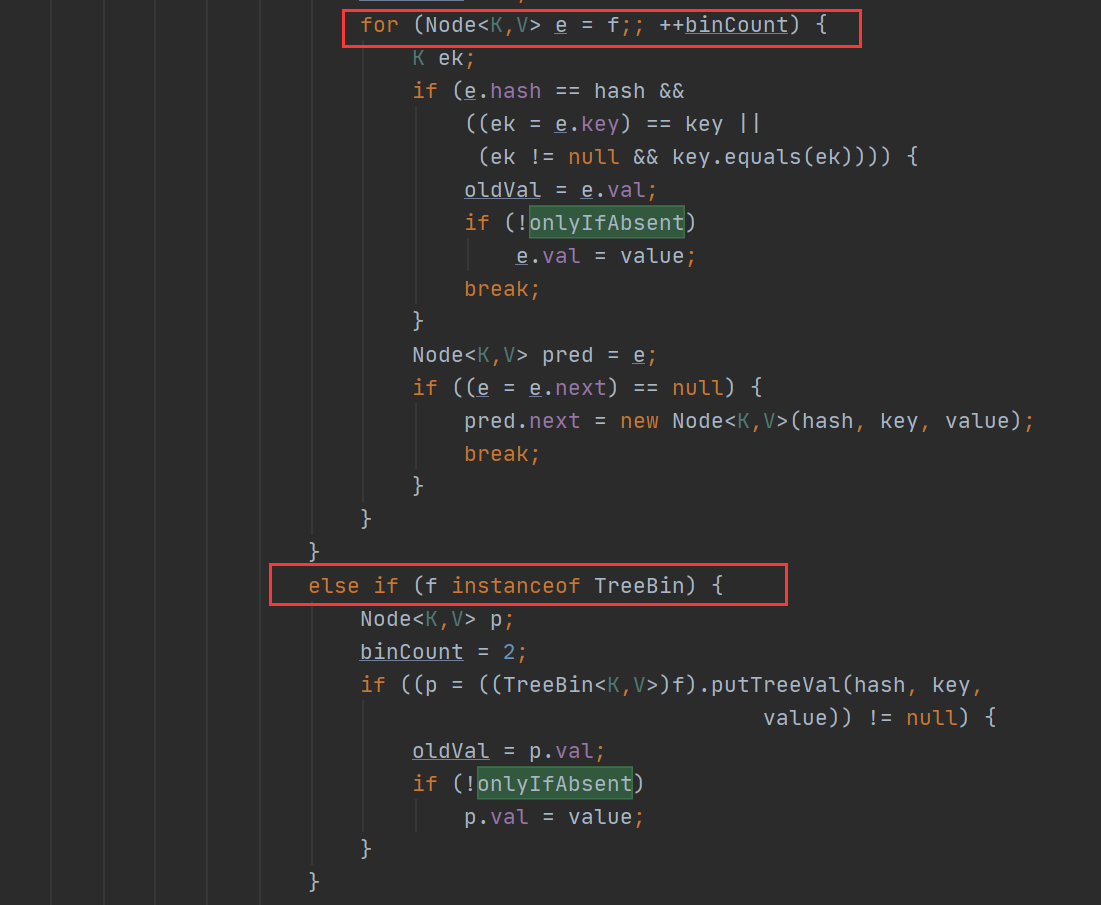
- 否則進入下一個 else,也就是不屬於上面任何一個特殊情況的插入,需要遍歷這裏面的鏈表進行插入,可以看到利用了 synchronized ,加鎖 然後,遍歷鏈表寫入數據,那如果不是鏈表,是樹節點,就走另一個分支去遍歷插入。插入完成之後,就常規的將元素個數+1 並結束,那麼+1的時候調用的是 addCount 方法,這個方法就涉及到可能會擴容,下面有詳細講解。
可以看到,這種 put 將加鎖的粒度又變得更小,僅僅鎖到了那個,要插入的數組的位置的那個鏈表(或者樹根節點),顯然根本不會影響到其他的不在數組的這個位置的插入操作。
要知道確定的那個桶里的元素本來由於 hashmap 的升級,都是很均勻的,而且 synchronized 本身的實現又有優化,所以比 7 的做法好很多。
2.4 jdk 8 的 get() 方法
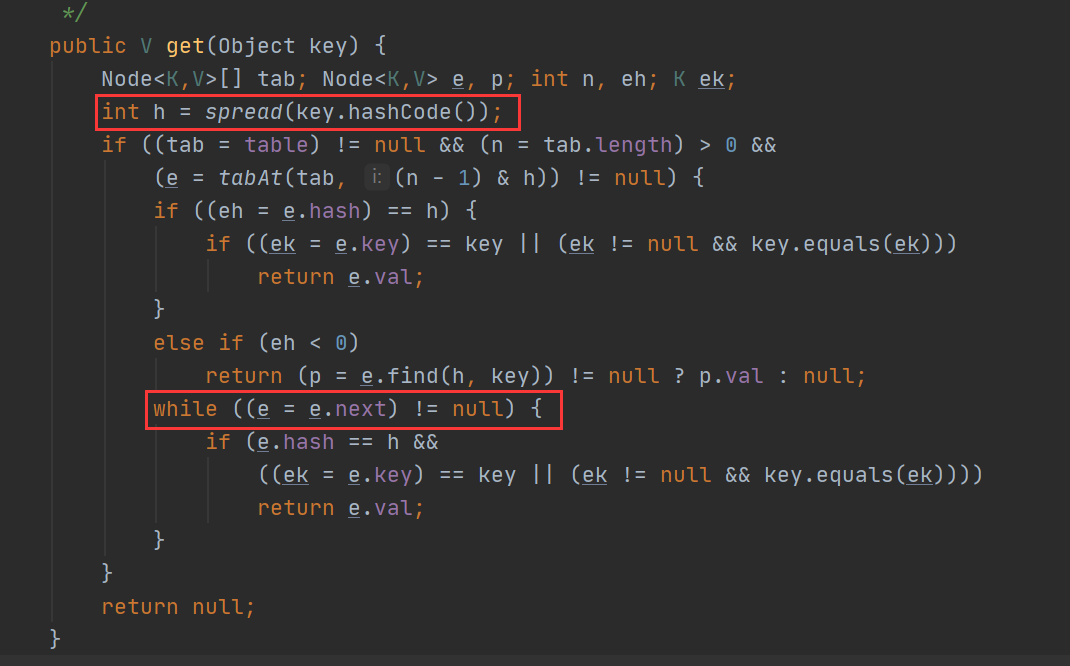
- 同樣計算出索引位置;
- 如果在這個索引位置的根節點獲取到了直接返回;
- 否則如果說 eh < 0,代表是一個紅黑樹的狀態,那麼就會調用 find 方法去查找;
- 否則就遍歷鏈表,找到值並返回。
可以看到get 方法因為節點的對象本身就都是 volatile 的,具有可見性,因此 get 方法直接找到返回,否則返回 null,沒有任何加鎖操作。
2.5 jdk 8 的 addCount 方法
添加元素的相關操作之後,最後會調用 addCount 方法,也就是判斷是否需要擴容,在這裏面控制不同的策略。
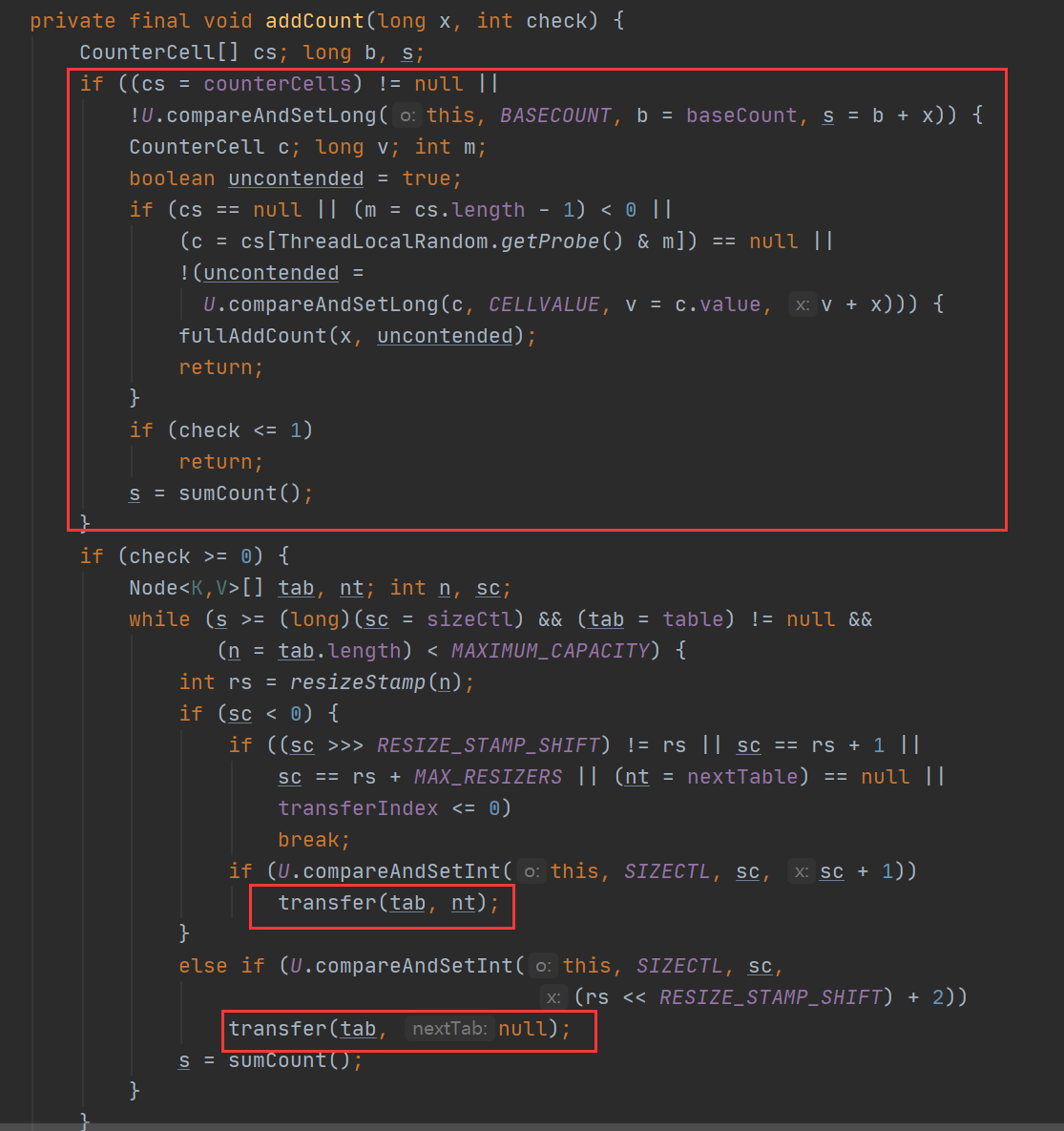
整體思路,在圈出來的判斷 check>= 0 之前的操作:是對 hashMap 的 size 進行更新,為了防止多個線程競爭更改 baseCount 的值,會將多個線程分散到一個叫 CounterCell 的數組裏面,對 cell 中的value值進行更改,最後再同步給 baseCount。
然後開始判斷 check :
- 如果新容量大於當前的閾值(大小*0.75),才擴容;
- 如果 sc < 0 ,說明當前是有別的線程進行擴容操作的,因此要先判斷一些極端情況,然後用 CAS 操作去修改 sizCtl ,增加一個協助擴容的線程,調用 transfer 方法,這個是擴容的核心方法。
- 否則 sc 肯定是 >=0 了,代表數組還沒創建,同樣用 CAS 操作創建,再去擴容。
2.6 jdk8 的擴容方法 transfer()
transfer 方法主要就是完成將擴容任務分配給多個線程去處理,根據了CPU核心數和集合 length 計算每個核一輪處理桶的個數。
然後每個線程處理的最小單位只能是一個數組的位置,這個時候擴容之後,和HashMap 一樣,其實只有原位置或者 原位置+數組長度 的位置,因為仍然有可能多個線程操作之間發生哈希衝突,就用到 synchronized。
源碼很長,這裡的詳細注釋參考的是一個博客:
//www.cnblogs.com/gunduzi/p/13651664.html
/**
* Moves and/or copies the nodes in each bin to new table. See
* above for explanation.
*
* transferIndex 表示轉移時的下標,初始為擴容前的 length。
*
* 我們假設長度是 32
*/
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
int n = tab.length, stride;
// 將 length / 8 然後除以 CPU核心數。如果得到的結果小於 16,那麼就使用 16。
// 這裡的目的是讓每個 CPU 處理的桶一樣多,避免出現轉移任務不均勻的現象,如果桶較少的話,默認一個 CPU(一個線程)處理 16 個桶
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE; // subdivide range 細分範圍 stridea:TODO
// 新的 table 尚未初始化
if (nextTab == null) { // initiating
try {
// 擴容 2 倍
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1];
// 更新
nextTab = nt;
} catch (Throwable ex) { // try to cope with OOME
// 擴容失敗, sizeCtl 使用 int 最大值。
sizeCtl = Integer.MAX_VALUE;
return;// 結束
}
// 更新成員變量
nextTable = nextTab;
// 更新轉移下標,就是 老的 tab 的 length
transferIndex = n;
}
// 新 tab 的 length
int nextn = nextTab.length;
// 創建一個 fwd 節點,用於佔位。當別的線程發現這個槽位中是 fwd 類型的節點,則跳過這個節點。
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
// 首次推進為 true,如果等於 true,說明需要再次推進一個下標(i--),反之,如果是 false,那麼就不能推進下標,需要將當前的下標處理完畢才能繼續推進
boolean advance = true;
// 完成狀態,如果是 true,就結束此方法。
boolean finishing = false; // to ensure sweep before committing nextTab
// 死循環,i 表示下標,bound 表示當前線程可以處理的當前桶區間最小下標,死循環的作用是保證拷貝全部完成。
for (int i = 0, bound = 0;;) {
Node<K,V> f; int fh;
// 如果當前線程可以向後推進;這個循環就是控制 i 遞減。同時,每個線程都會進入這裡取得自己需要轉移的桶的區間 //這個循環只是用來控制每個線程每輪最多copy的桶的個數,如果只有一個線程在擴容,也是可以完成的,只是分成多輪
while (advance) {
int nextIndex, nextBound;
// 對 i 減一,判斷是否大於等於 bound (正常情況下,如果大於 bound 不成立,說明該線程上次領取的任務已經完成了。那麼,需要在下面繼續領取任務)
// 如果對 i 減一大於等於 bound(還需要繼續做任務),或者完成了,修改推進狀態為 false,不能推進了。任務成功後修改推進狀態為 true。
// 通常,第一次進入循環,i-- 這個判斷會無法通過,從而走下面的 nextIndex 賦值操作(獲取最新的轉移下標)。其餘情況都是:如果可以推進, //將 i 減一,然後修改成不可推進。如果 i 對應的桶處理成功了,改成可以推進。
if (--i >= bound || finishing)
advance = false;// 這裡設置 false,是為了防止在沒有成功處理一個桶的情況下卻進行了推進
// 這裡的目的是:1. 當一個線程進入時,會選取最新的轉移下標。2. 當一個線程處理完自己的區間時,如果還有剩餘區間的沒有別的線程處理。再次獲取區間。
else if ((nextIndex = transferIndex) <= 0) {
// 如果小於等於0,說明沒有區間了 ,i 改成 -1,推進狀態變成 false,不再推進,表示,擴容結束了,當前線程可以退出了
// 這個 -1 會在下面的 if 塊里判斷,從而進入完成狀態判斷
i = -1;
advance = false;// 這裡設置 false,是為了防止在沒有成功處理一個桶的情況下卻進行了推進
}// CAS 修改 transferIndex,即 length - 區間值,留下剩餘的區間值供後面的線程使用
else if (U.compareAndSwapInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
bound = nextBound;// 這個值就是當前線程可以處理的最小當前區間最小下標
i = nextIndex - 1; // 初次對i 賦值,這個就是當前線程可以處理的當前區間的最大下標
advance = false; // 這裡設置 false,是為了防止在沒有成功處理一個桶的情況下卻進行了推進,這樣對導致漏掉某個桶。下面的 if (tabAt(tab, i) == f) 判斷會出現這樣的情況。
}
}
// 如果 i 小於0 (不在 tab 下標內,按照上面的判斷,領取最後一段區間的線程擴容結束)
// 如果 i >= tab.length(不知道為什麼這麼判斷)
// 如果 i + tab.length >= nextTable.length (不知道為什麼這麼判斷)
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
if (finishing) { // 如果完成了擴容
nextTable = null;// 刪除成員變量
table = nextTab;// 更新 table
sizeCtl = (n << 1) - (n >>> 1); // 更新閾值
return;// 結束方法。
}// 如果沒完成 //說明1
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {// 嘗試將 sc -1. 表示這個線程結束幫助擴容了,將 sc 的低 16 位減一。
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)// 如果 sc - 2 不等於標識符左移 16 位。如果他們相等了,說明沒有線程在幫助他們擴容了。也就是說,擴容結束了。
return;// 不相等,說明沒結束,當前線程結束方法。
finishing = advance = true;// 如果相等,擴容結束了,更新 finising 變量
i = n; // 再次循環檢查一下整張表
}
}
else if ((f = tabAt(tab, i)) == null) // 獲取老 tab i 下標位置的變量,如果是 null,就使用 fwd 佔位。
advance = casTabAt(tab, i, null, fwd);// 如果成功寫入 fwd 佔位,再次推進一個下標
else if ((fh = f.hash) == MOVED)// 如果不是 null 且 hash 值是 MOVED。
advance = true; // already processed // 說明別的線程已經處理過了,再次推進一個下標
else {// 到這裡,說明這個位置有實際值了,且不是佔位符。對這個節點上鎖。為什麼上鎖,防止 putVal 的時候向鏈表插入數據
synchronized (f) {
// 判斷 i 下標處的桶節點是否和 f 相同
if (tabAt(tab, i) == f) {
Node<K,V> ln, hn;// low, height 高位桶,低位桶
// 如果 f 的 hash 值大於 0 。TreeBin 的 hash 是 -2
if (fh >= 0) {
// 對老長度進行與運算(第一個操作數的的第n位於第二個操作數的第n位如果都是1,那麼結果的第n為也為1,否則為0)
// 由於 Map 的長度都是 2 的次方(000001000 這類的數字),那麼取於 length 只有 2 種結果,一種是 0,一種是1
// 如果是結果是0 ,Doug Lea 將其放在低位,反之放在高位,目的是將鏈表重新 hash,放到對應的位置上,讓新的取於算法能夠擊中他。
int runBit = fh & n;
Node<K,V> lastRun = f; // 尾節點,且和頭節點的 hash 值取於不相等
// 遍歷這個桶 //說明2
for (Node<K,V> p = f.next; p != null; p = p.next) {
// 取於桶中每個節點的 hash 值
int b = p.hash & n;
// 如果節點的 hash 值和首節點的 hash 值取於結果不同
if (b != runBit) {
runBit = b; // 更新 runBit,用於下面判斷 lastRun 該賦值給 ln 還是 hn。
lastRun = p; // 這個 lastRun 保證後面的節點與自己的取於值相同,避免後面沒有必要的循環
}
}
if (runBit == 0) {// 如果最後更新的 runBit 是 0 ,設置低位節點
ln = lastRun;
hn = null;
}
else {
hn = lastRun; // 如果最後更新的 runBit 是 1, 設置高位節點
ln = null;
}// 再次循環,生成兩個鏈表,lastRun 作為停止條件,這樣就是避免無謂的循環(lastRun 後面都是相同的取於結果)
for (Node<K,V> p = f; p != lastRun; p = p.next) {
int ph = p.hash; K pk = p.key; V pv = p.val;
// 如果與運算結果是 0,那麼就還在低位
if ((ph & n) == 0) // 如果是0 ,那麼創建低位節點
ln = new Node<K,V>(ph, pk, pv, ln);
else // 1 則創建高位
hn = new Node<K,V>(ph, pk, pv, hn);
}
// 其實這裡類似 hashMap
// 設置低位鏈表放在新鏈表的 i
setTabAt(nextTab, i, ln);
// 設置高位鏈表,在原有長度上加 n
setTabAt(nextTab, i + n, hn);
// 將舊的鏈表設置成佔位符
setTabAt(tab, i, fwd);
// 繼續向後推進
advance = true;
}// 如果是紅黑樹
else if (f instanceof TreeBin) {
TreeBin<K,V> t = (TreeBin<K,V>)f;
TreeNode<K,V> lo = null, loTail = null;
TreeNode<K,V> hi = null, hiTail = null;
int lc = 0, hc = 0;
// 遍歷
for (Node<K,V> e = t.first; e != null; e = e.next) {
int h = e.hash;
TreeNode<K,V> p = new TreeNode<K,V>
(h, e.key, e.val, null, null);
// 和鏈表相同的判斷,與運算 == 0 的放在低位
if ((h & n) == 0) {
if ((p.prev = loTail) == null)
lo = p;
else
loTail.next = p;
loTail = p;
++lc;
} // 不是 0 的放在高位
else {
if ((p.prev = hiTail) == null)
hi = p;
else
hiTail.next = p;
hiTail = p;
++hc;
}
}
// 如果樹的節點數小於等於 6,那麼轉成鏈表,反之,創建一個新的樹
ln = (lc <= UNTREEIFY_THRESHOLD) ? untreeify(lo) :
(hc != 0) ? new TreeBin<K,V>(lo) : t;
hn = (hc <= UNTREEIFY_THRESHOLD) ? untreeify(hi) :
(lc != 0) ? new TreeBin<K,V>(hi) : t;
// 低位樹
setTabAt(nextTab, i, ln);
// 高位數
setTabAt(nextTab, i + n, hn);
// 舊的設置成佔位符
setTabAt(tab, i, fwd);
// 繼續向後推進
advance = true;
}
}
}
}
}
}
流程如下:
- 根據操作系統的 CPU 核數和集合 length 計算每個核一輪處理桶的個數,最小是16
- 修改 transferIndex 標誌位,每個線程領取完任務就減去多少,比如初始大小是transferIndex = table.length = 64,每個線程領取的桶個數是16,第一個線程領取完任務後transferIndex = 48,也就是說第二個線程這時進來是從第 48 個桶開始處理,再減去16,依次類推,這就是多線程協作處理的原理
- 領取完任務之後就開始處理,如果桶為空就設置為 ForwardingNode ,如果不為空就加鎖拷貝,只有這裡用到了 synchronized 關鍵字來加鎖,為了防止拷貝的過程有其他線程在put元素進來。拷貝完成之後也設置為 ForwardingNode節點。
- 如果某個線程分配的桶處理完了之後,再去申請,發現 transferIndex = 0,這個時候就說明所有的桶都領取完了,但是別的線程領取任務之後有沒有處理完並不知道,該線程會將 sizeCtl 的值減1,然後判斷是不是所有線程都退出了,如果還有線程在處理,就退出
- 直到最後一個線程處理完,發現 sizeCtl = rs<< RESIZE_STAMP_SHIFT 也就是標識符左移 16 位,才會將舊數組幹掉,用新數組覆蓋,並且會重新設置 sizeCtl 為新數組的擴容點。
以上過程總的來說分成兩個部分:
- 分配任務:這部分其實很簡單,就是把一個大的數組給切分,切分多個小份,然後每個線程處理其中每一小份,當然可能就只有1個或者幾個線程在擴容,那就一輪一輪的處理,一輪處理一份
- 處理任務:複製部分主要有兩點,第一點就是加鎖,第二點就是處理完之後置為ForwardingNode來佔位標識這個位置被遷移過了。
2.7 jdk8 的協助擴容 helpTransfer()方法
如果說 put 的時候發現數組正在擴容,會執行 helpTransfer 方法,也就是這個線程來幫助進行擴容。

我們還要看一下 helpTransfer 方法:

和普通的擴容方法也是類似的。
到這裡,可以發現 jdk8 之後 ConcurrentHashMap 的變化優化非常複雜…因此感覺和jdk7沒什麼必要對比了。


