【CV現狀-3.3】特徵提取與描述
- 2019 年 10 月 14 日
- 筆記
#磨染的初心——計算機視覺的現狀
【這一系列文章是關於計算機視覺的反思,希望能引起一些人的共鳴。可以隨意傳播,隨意噴。所涉及的內容過多,將按如下內容劃分章節。已經完成的會逐漸加上鏈接。】
- 緣起
- 三維感知
- 目標識別
3.0. 目標是什麼
3.1. 圖像分割
3.2. 紋理與材質
3.3. 特徵提取與分類 - 目標(和自身)在三維空間中的位置關係
- 目標的三維形狀及其改變、目標的位移
- 符號識別
- 數字圖像處理
特徵提取與分類
一定是因為紋理分析與描述以及圖像分割沒有取得有效的進展,導致通過材質、形狀、結構進行目標識別的願望落了空。甚至當前最優秀的圖像分割算法都不能產生人類能夠識別的圖斑形狀,此外形狀和結構描述方面也沒有取得多少成果,更遑論有價值的成果。但是機器學習卻取得了長足的進步,各種各樣適合不同分佈模型的監督分類算法被發明了出來。目標識別也就順其自然地走上了「提取特徵+描述特徵+監督分類」的路線,成就也是顯而易見的,當前落地了的計算機視覺應用背後都得到了「特徵提取與描述」以及分類的加持。隨着卷積神經網絡的出現,人工特徵提取與描述都省了,計算機視覺已然有了被機器學習收歸囊下的意思。
然而相對於紙面上的喧囂,卷積神經網絡並沒有開拓出實打實的應用領域。在深度學習成為熱詞之前,計算機視覺已經滿足了人臉識別、指紋識別、行人檢測、車輛檢測、質檢、工業控制等場景的應用需求。深度學習火熱之後應用場景沒有增加,需求的滿足水平也沒有本質的提升,唯一改變的是社會對計算機視覺的接受程度——這些應用場景的市場規模被拓展了。
不知道應該用「十字路口」還是應該用「瓶頸」來形容這個現狀,不管怎麼樣,回顧、總結終歸是有用的。就在此回顧、總結一下驅動計算機視覺發展到目前的引擎——「特徵提取與描述」——吧。歸納起來目前能夠提取的特徵有點、線、斑塊三類。點特徵在圖像配准、圖像幾何校正、圖像鑲嵌、多視幾何恢復任務中起到了至關重要的作用。對於線特徵,由於缺乏有效的描述方法以及連接成閉合圖形的方法,目前還沒有什麼廣泛的用處。斑塊特徵是筆者的歸納,也許難以理解,該類特徵直接和間接表示了圖斑之間的位置關係或者圖斑的幾何結構以及圖斑的紋理。比如HAAR和DPM就是斑塊類特徵,HAAR檢測器中兩個區域均值相減的操作就是為了在斑塊邊界上取得足夠的響應;從DPM這個名稱中就可發現其目的是為了對部件(斑塊)的組合有足夠的響應,DPM的基礎——梯度直方圖(HoG)——一定程度上反應了圖斑的紋理。
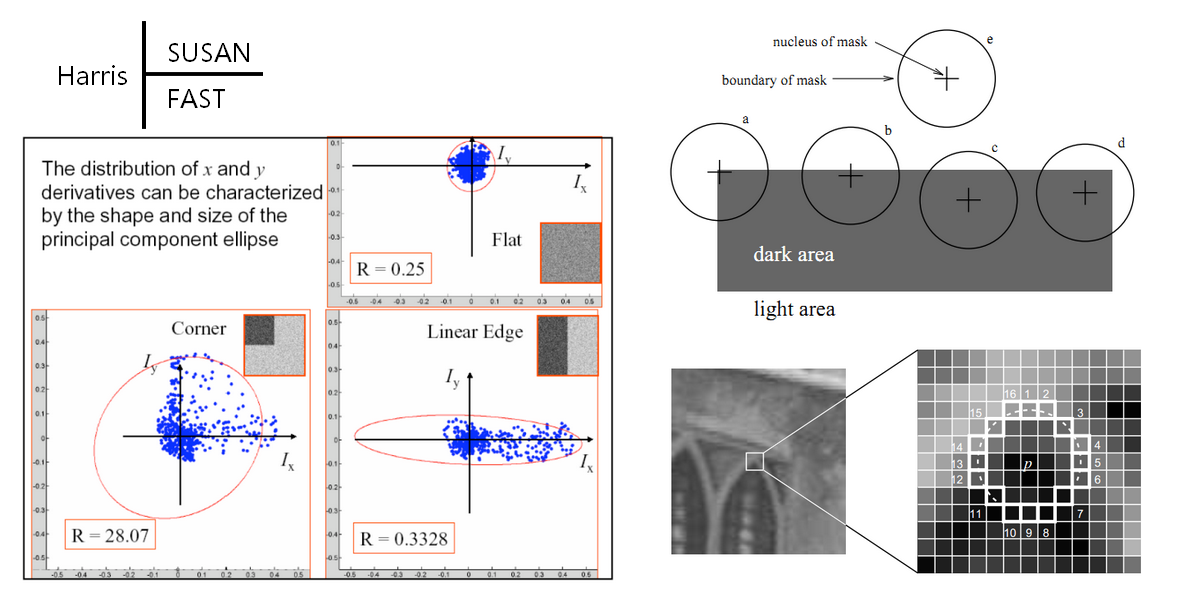
目前點特徵提取算法的核心思路有三種,其代表算法分別是Harris、FAST、SUSAN。Harris算法所基於的現象是——角點處更多方向上的梯度將會取得較大值,在判別的時候採用了DoH(Determinant of Hessian),採用此思路的角點檢測算法有SIFT、SURF、KAZE。FAST算法所基於的現象是——以角點為中心的圓環上有更長連續像素點的取值與中心點的取值差異較大,最直接的判別依據為圓環上與中心點取值不同的連續像素點的數目,具體實現時採用了不同的優化手段,採用此思路的角點檢測算法有AGAST、BRISK、ORB、FREAK。SUSAN算法所基於的現象是——以角點為中心的中心對稱區域中與角點取值相同的像素最少,判別依據為與角點取值相同的像素數量。有些算法在採用這些思想時會進行近似計算、縮減計算規模等操作,看起來像是脫離了這三種思路,尤其是SIFT和SURF,他們分別採用LoG和Haar小波來近似梯度的計算。另外在多個尺度上應用具體的角點檢測方法是很自然的事情,雖然建立尺度集的具體方法不一定是容易想到的。
要在圖像配准、圖像幾何校正、圖像鑲嵌、多視幾何恢復等任務中應用點特徵,必須匹配相同或相似的點。因此需要基於某種測度方法對特徵的內涵進行量化,這就叫做特徵的描述。常用的點特徵描述方法有BRIEF、ORB(Steered BRIEF)、BRISK、SIFT、SURF等。其中BRIEF、ORB(Steered BRIEF)、BRISK描述方法在特徵點周圍採用一定的方式採集一些點對,然後針對具體的特徵點使用二值方式編碼點對間像元值的差異,量化的結果是二值串,一般採用漢明距離比較相似程度;當然具體的點對採集方式和點對像元值差異編碼方式各不相同。SIFT、SURF描述方法對特徵點周圍的梯度按照方向進行統計形成了梯度直方圖(HoG),量化結果是多維向量,在比較相似度時是當作空間坐標進行處理的。這些點特徵描述方法不是只能用於描述提取出來的特徵點,還可以對圖像上任意像素的局部特徵進行描述。還有其他一些局部特徵描述方法,用來描述特徵點時全局區分度不夠,一般用在三維重建的密集匹配過程中。
圖像中明顯的線特徵就是邊緣和細線狀要素,都可以通過邊緣檢測算法提取出來。梯度算子對邊緣有很高的響應,因此梯度算子也會叫做邊緣檢測算子,然而用梯度算子對圖像做卷積絕對不能稱作邊緣檢測,這是流傳甚廣的錯誤。即使不要求獲得邊緣點組成的坐標串,邊緣檢測算法也應該獲得去除了非邊緣點的圖像而不是邊緣被顯示增強的圖像。符合這個要求的邊緣檢測算法有兩種——Marr-Hildreth和Canny。Canny算法提取出來的邊緣點是一階梯度的局部極大值點,Marr-Hildreth算法提取出來的是二階梯度的過零點。Canny算法的效果雖然明顯優於Marr-Hildreth,但是也有自身的缺點——強弱邊緣梯度的閾值難以確定。在圖像中提取出不封閉的特徵線,好像實在沒有太大的用處,甚至Canny算法的提取效果已經遠遠超過當前的應用需要了。如果說要提取出封閉的特徵線,那就是圖像分割的任務了;另外如果觀察過很多圖像,肯定會同意圖像上很多線要素都不是封閉的。關於線提取還有另外一種方法,就是先二值化再應用骨架提取算法;這種方法應用在成像環境和成像對象高度受控的場景,如指紋識別、工業質檢等。圖像上的直線和圓弧是高度特殊的一類特徵線,在線特徵提取算法的基礎上再將這些可以簡單參數化表示的線提取出來的算法叫霍夫變換(Hough Transform),在車道線檢測、機場跑道識別等任務上有一定的用處。
當然最近也有不少基於深度學習的點、線提取算法被提了出來,就筆者而言,這不過是「茴」字的另外幾種寫法而已。因為從一定程度上來說,點、線特徵提取是已經解決了的問題,如果智商有餘額應當去定義和解決真正的問題。
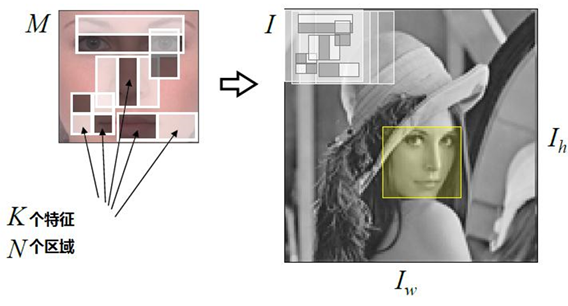
斑塊特徵的作用在於目標檢測(目標識別、圖像分類),這也是卷積神經網絡發揮巨大作用的領域。對於圖斑來說,不像點、線一樣,要將其提取出來;而是採用逆向思維,直接設計一種適合具體任務的描述圖斑所蘊含特徵的方法。比如,利用Haar特徵進行人臉檢測時,設計幾個Haar-like filter(box filter)採用如下圖的布局進行組合,在圖像上滑動的時候每個Haar-like filter在其所處的位置上計算出一個值,多個Haar-like filter的計算結果形成特徵向量。利用監督分類算法訓練出針對此特徵向量的分類器,用於判別滑動窗口之下是否是人臉。
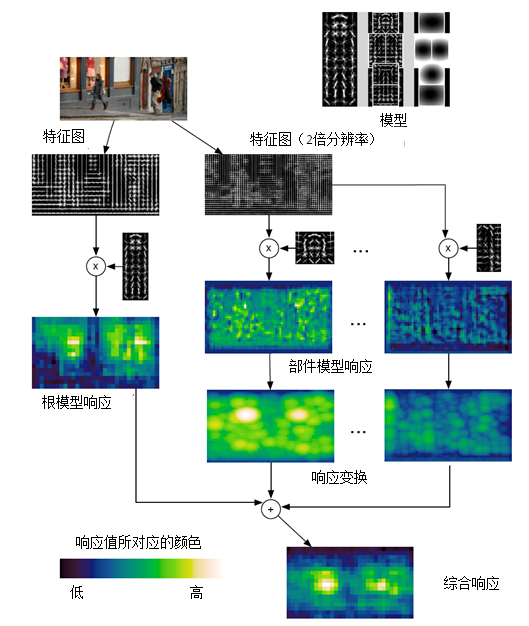
至於DPM,思路是類似的,採用HoG方法計算出窗口內的特徵向量,然後訓練一個打分器,窗口內如果是要檢測的目標得分就越高。當然DPM採用了一個根打分器和多個部件打分器,結合部件偏移損失將部件得分和根得分綜合到一起作為最終得分,如果最終得分高於閾值就認為根窗口和部件窗口的組合區域中是要檢測的目標。
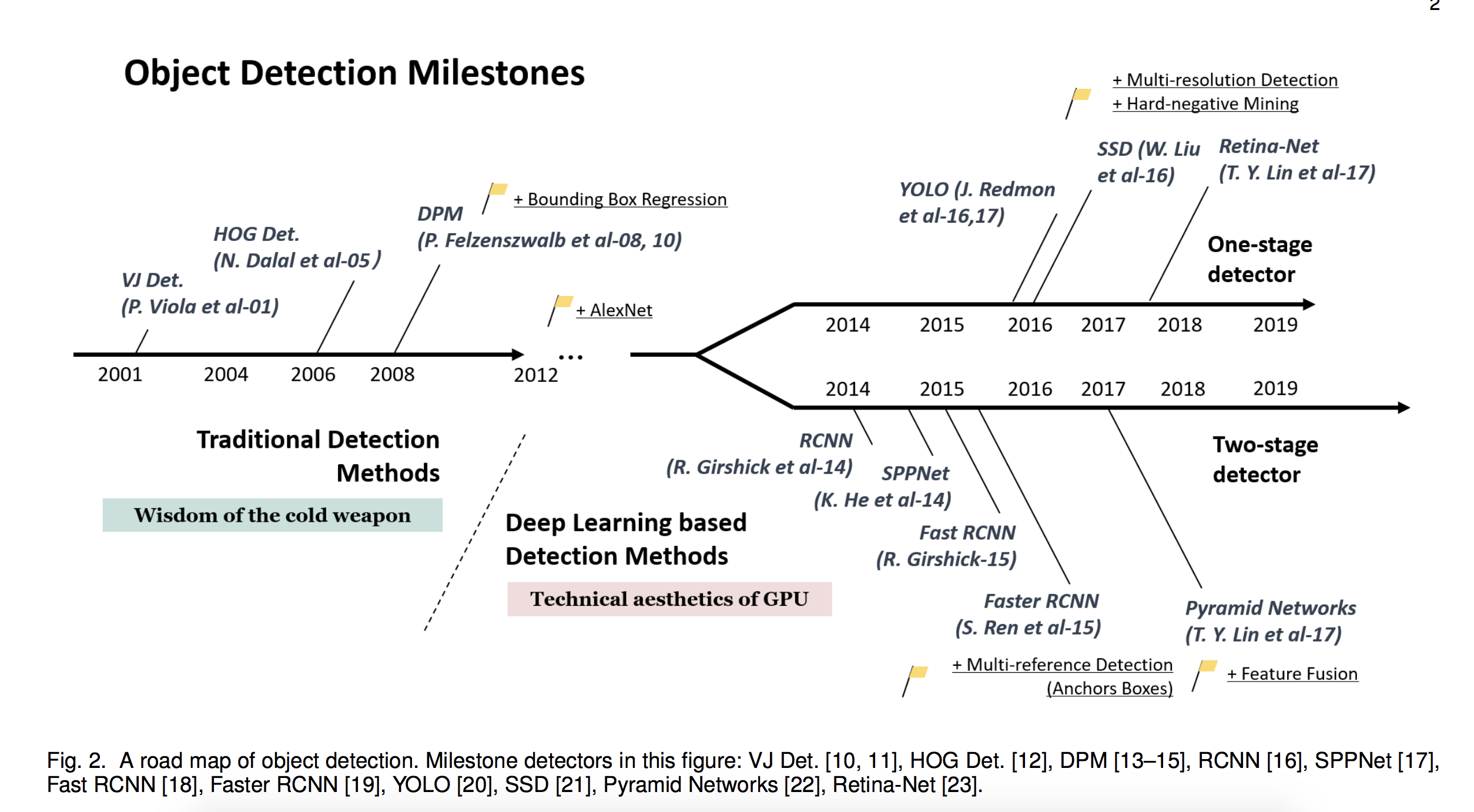
就筆者所知,適用於目標檢測的人工特徵描述方法就只有Haar和HoG了,之後舞台就交給了CNN。不可否認CNN使目標檢測的效果得到了跨越式提升,很多優秀的結構被提了出來,也解決了很多實質問題,如殘差網絡、錨點框、One-Stage、FPN、FocusLoss等。
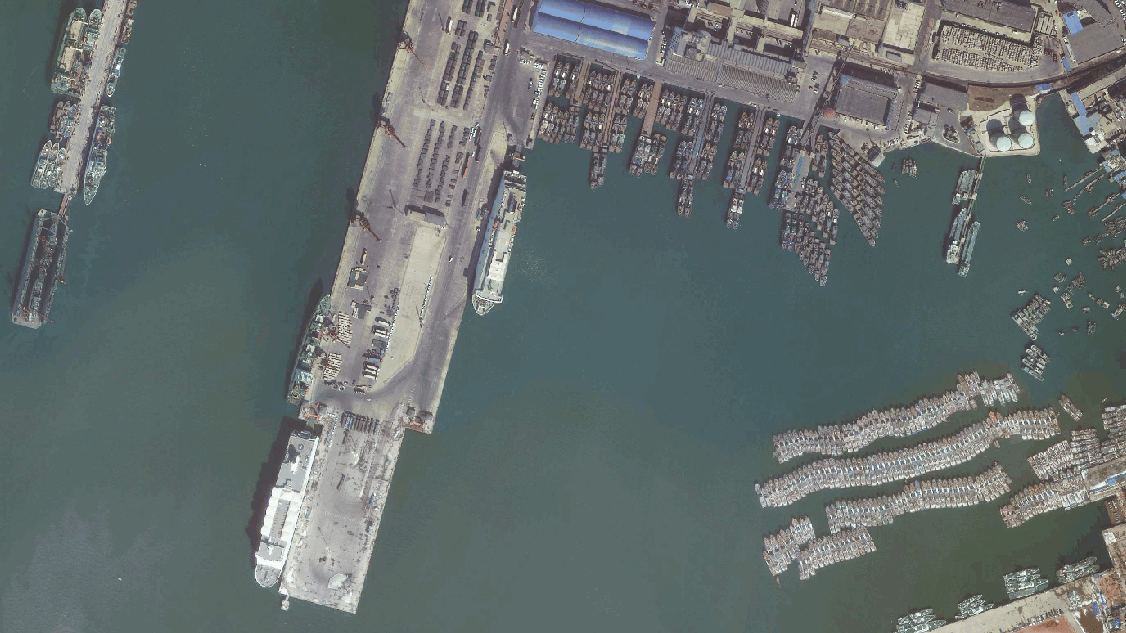
然而CNN並非沒有缺陷,除了截至目前還無法解決的遷移和泛化問題之外,CNN的正方形感受野使其在識別狹長形目標時顯得力不從心,如果狹長形目標是緊挨在一起的形勢就更加嚴峻了。這種情況在航空影像和衛星影像上尤為常見,如下圖所示,狹長的大汽車是較難識別的目標,港口的輪船是更難識別的目標。飛機靠氣動外形才能飛,樣式都是一樣的;船體不管什麼樣的只要排水量超過自重就能漂起來航行,在衛星影像上幾乎沒有兩艘船是一樣的。航空影像和衛星影像上最容易識別的就是飛機,接下來是體育場,他們都佔據方方正正的空間,外觀也比較單一。這也是很多機構只公開飛機和體育場檢測效果的原因。