基於Hdl Coder實現卡爾曼濾波算法
- 2020 年 5 月 22 日
- 筆記
總所周知,FPGA極其不擅長複雜算法的運算,但是如果項目中又涉及一些高級算法的實現,在沒有可封裝IP核調用的形式下,我們應該如何進行程序開發呢?今夕已經是2020年,我們一味依賴於用verilog寫代碼無異於用彙編寫程序,這種方式無異於古時鑽木取火的原始時代。如今用Matlab聯調FPGA,基於simulink的Hdl Coder模塊搭建算法模型,再自動生成代碼才是高階有效的終極玩法。尤其在一些信號處理領域,掌握Matlab聯調FPGA的技術更是必備技能。
下面以卡爾曼濾波為例,具體講述如何基於Hdl Coder實現卡爾曼濾波算法實現。首先簡單介紹下卡爾曼濾波算法:
卡爾曼濾波(Kalman filtering)是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。由於觀測數據中包含系統噪聲和干擾的影響,所以最優估計也可看作是濾波過程。簡單來說,它就是利用過去的狀態值和現在的測量值來更正現在的狀態值,利用卡爾曼增益不停在估計和測量中尋找最優化的平衡值。
Kalman filtering的經典五方程,在進行卡爾曼濾波的程序設計前必須要充分理解這五個方程的定義、推導以及相關變量的設定。
(1) 對於現在狀態的預測方程:
X(k|k-1)=A X(k-1|k-1)+B U(k) ……….. (1)
P(k|k-1)=A P(k-1|k-1) A』+Q ……… (2)
(2)對於現在狀態的更新方程:(拿過去的真實值得到現在的預測值,再集合現在的測量值Z(k),進行現在狀態值的更新)
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) ……… (3)
Kg(k)= P(k|k-1) H』 / (H P(k|k-1) H』 + R) ……… (4)
P(k|k)=(I-Kg(k) H)P(k|k-1) ……… (5)
其中Z(k)=H X(k)+V(k)為觀測方程。
對於上述方程要明確以下幾個變量的賦值:
1) 狀態轉移矩陣:A
2) 系統控制變量:U(k)
3) 觀測矩陣:H
4)系統狀態初值:X(0|0)
5)系統協方差:P(0|0)
6)R:測量噪聲
7)Q:過程噪聲
8)Z:觀測值
這7個變量要根據不同的產品以及應用場景進行具體賦值,其中對於單系統輸入,變量賦值為:
1)A=1(狀態轉移矩陣),U(k)=0(系統控制變量), H=1(觀測矩陣),B=1(對於一維變量,全為1)
2)Z觀測值就是系統外部灌進來的實時變量。
3)系統協方差:P(0|0),可以採樣一段時間後進行運算保證在kalman濾波器工作前進行賦值即可。
4)對於卡爾曼應用,最難確定的就是Q、R這兩個噪聲,只能根據實際模型,不停調整以逼近最優解。
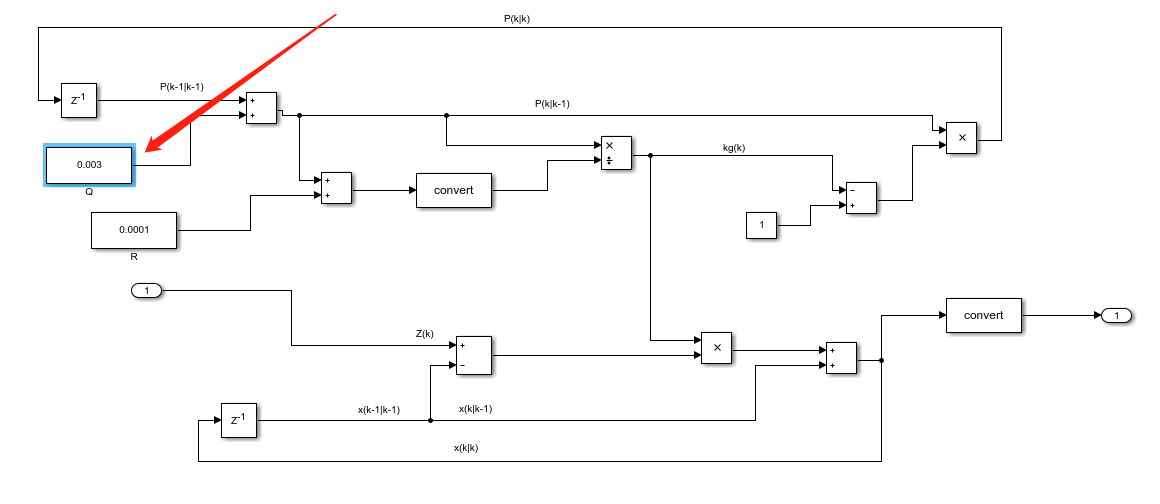
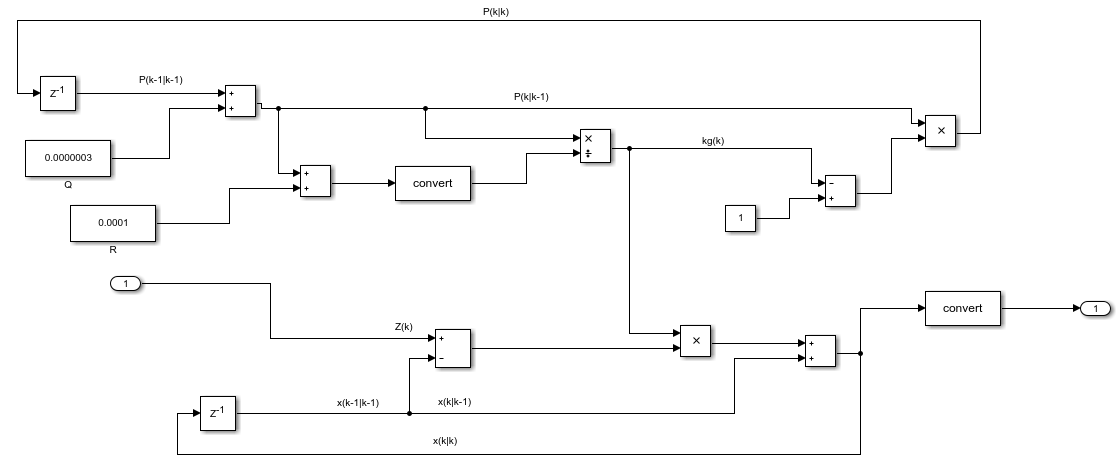
基於上述的卡爾曼濾波搭建simulink仿真模型
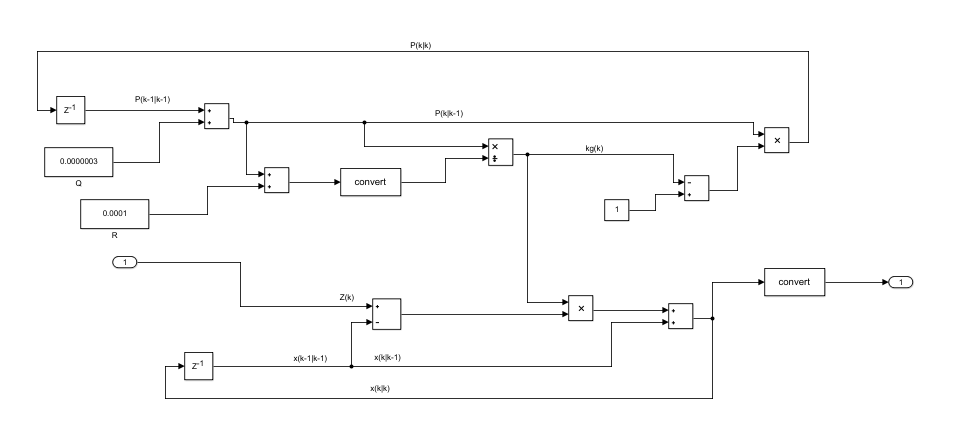
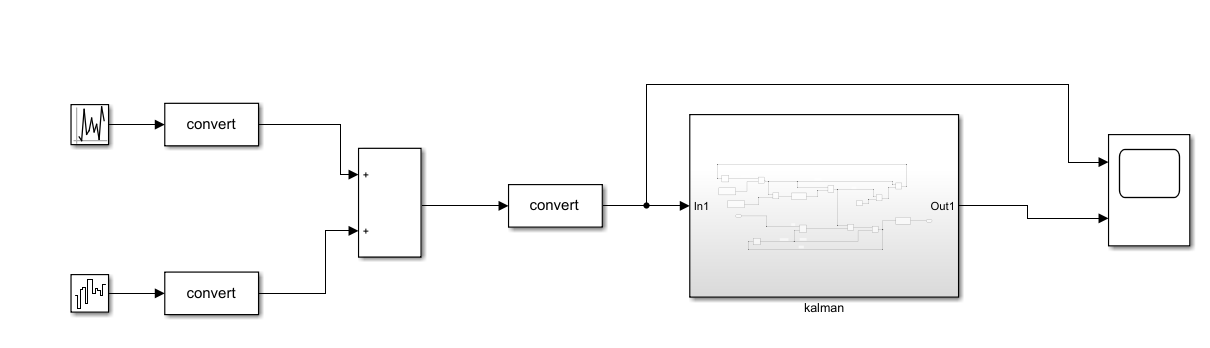
下面對上述simulink模型進行進一步封裝
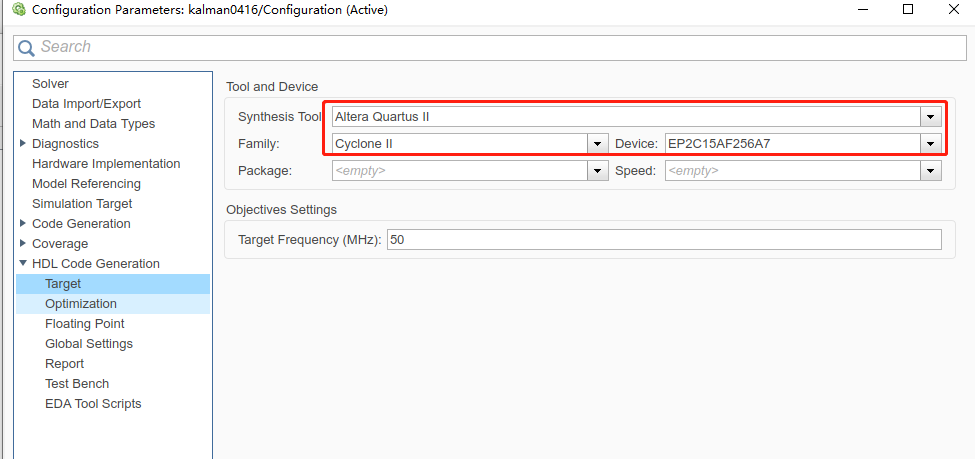
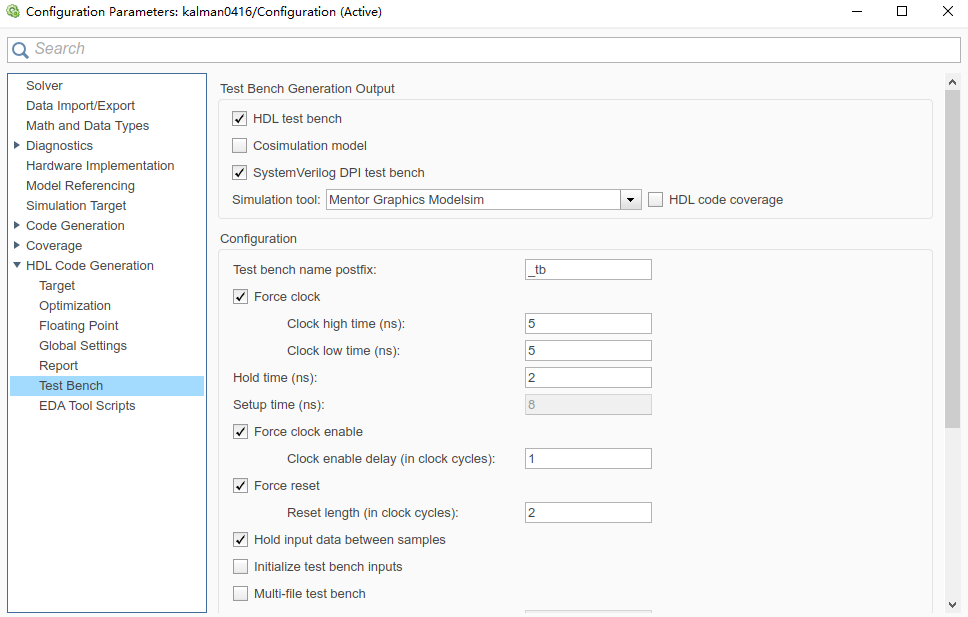
具體設置kalman模塊的Hdl Coder參數模式
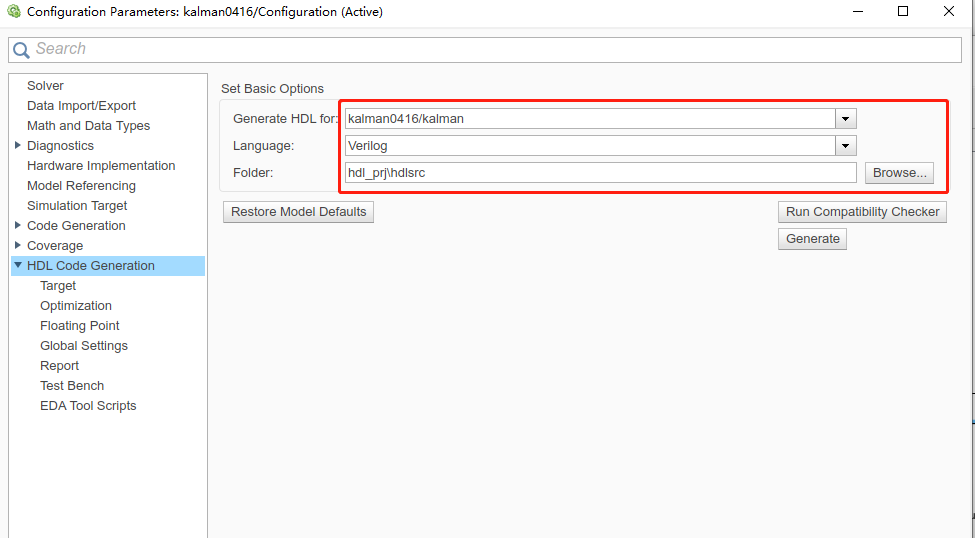
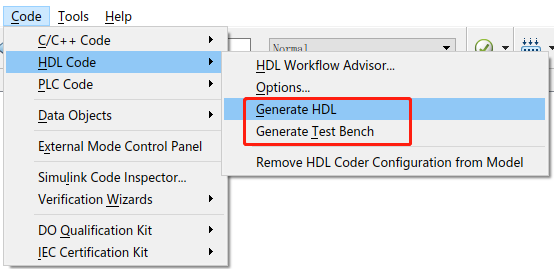
最後點擊「Generate HDL」與「Generate Test Bench」,生成verilog源程序與測試代碼
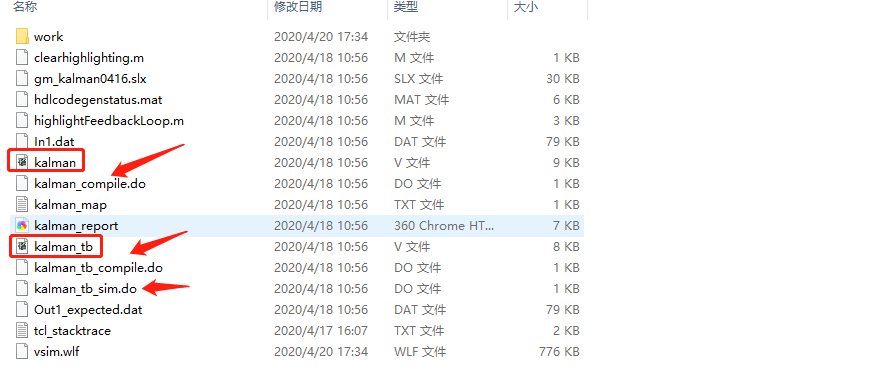
要對執行文件進行仿真,只需要在modelsim命令框自動執行以下後綴文件即可「kalman_compile.do」,”kalman_tb_compile.do”,”kalman_tb_sim.do”即可。
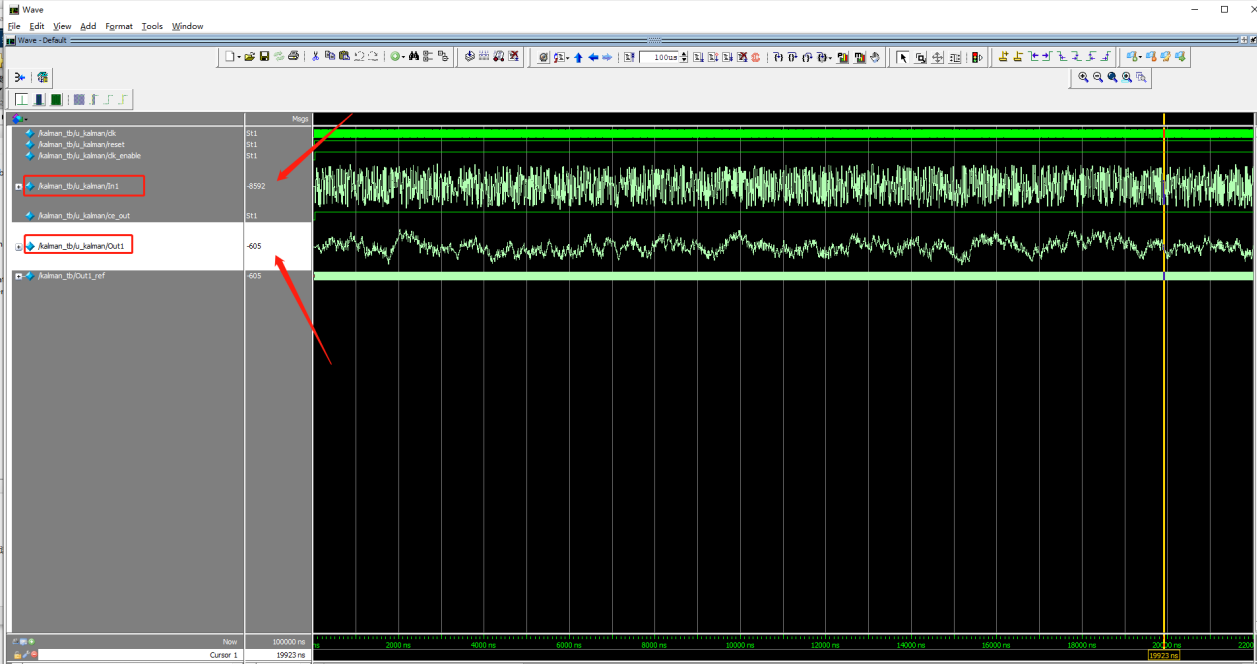
下面進行卡拉曼濾波效果展示:
結果展示:
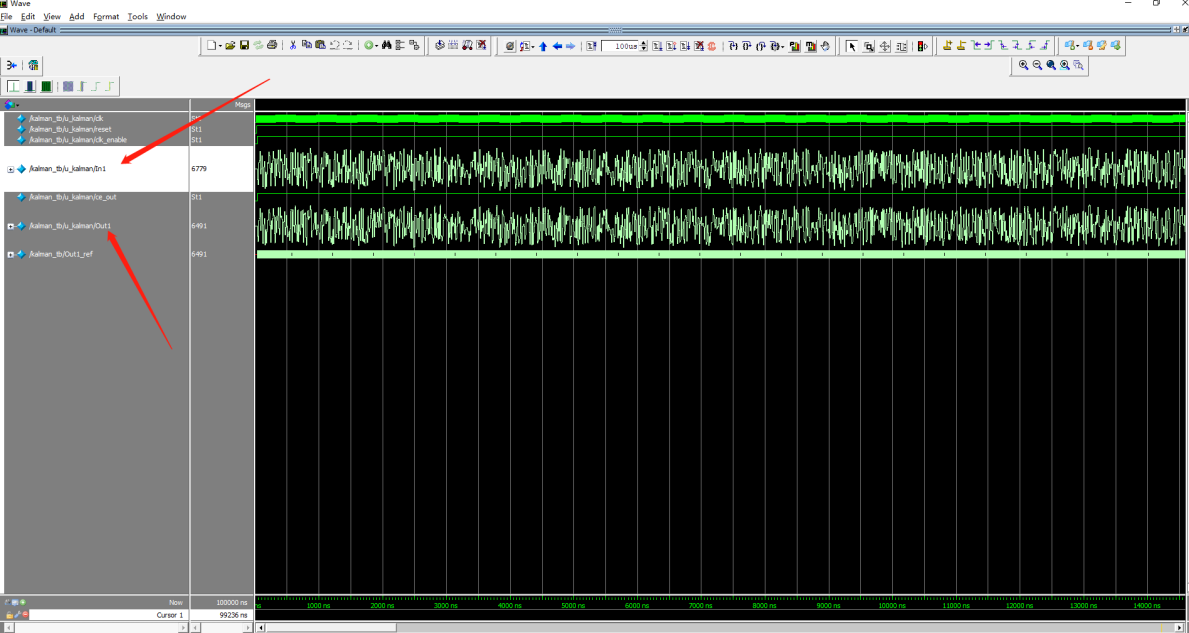
結果展示: