【AI PC端算法优化】四,一步步将Sobel边缘检测加速22倍
1. 前言
继续优化技术的探索,今天以一个3\times 3的 Sobel 算子进行边缘检测的算法为例来看看如何使用 SSE 指令集对其进行优化。
2. 原理介绍
众所周知,在传统的图像边缘检测算法中,最常用的一种算法是利用 Sobel 算子完成的。Sobel 算子一共有2个,一个是检测水平边缘的算子,另一个是检测垂直边缘的算子。
Sobel 算子的优点是可以利用快速卷积函数,简单有效,且对领域像素位置的影响做了加权,可以降低边缘模糊程度,有较好效果。然而 Sobel 算子并没有基于图像的灰度信息进行处理,所以在提取图像边缘信息的时候可能不会让人视觉满意。
我们来看一下怎么构造 Sobel 算子?
Sobel 算子是在一个坐标轴的方向进行非归一化的高斯平滑,在另外一个坐标轴方向做一个差分,kszie\times ksize大小的 Sobel 算子是由平滑算子和差分算子全卷积得到,其中ksize代表 Sobel 算子的半径,必须为奇数。
对于窗口大小为ksize的非归一化 Sobel 平滑算子等于ksize-1阶的二项式展开式的系数,而Sobel 平滑算子等于ksize-2阶的二项式展开式的系数两侧补0,然后向前差分。
在这个例子中:我们要构造一个3阶的 Sobel 非归一化的Sobel 平滑算子和 Sobel 差分算子:
Sobel 平滑算子: 取二项式的阶数为n=2,然后计算展开式系数为,[C_2^0, C_2^1, C_2^2] 也即是[1, 2, 1],这就是3阶的非归一化的 Sobel 平滑算子。
Sobel 差分算子:取二项式的阶数为n=3-2=1,然后计算二项展开式的系数,即为:[C_1^0, C_1^1],两侧补0 并且前向差分得到[1, 0,-1],第4项差分后可以直接删除。
Sobel 算子:将3阶的 Sobel 平滑算子和 Sobel 差分算子进行全卷积,即可得到3\times 3的 Sobel 算子。
其中x方向的 Sobel 算子为:
soble_x=\begin{bmatrix} 1 \\2\\1 \end{bmatrix} * \begin{bmatrix} 1 & 0 &-1\end{bmatrix}=\begin{bmatrix} 1 &0&-1\\2&0&-2\\1&0&-1
\end{bmatrix}
而y方向的 Sobel 算子为:
sobel_y=\begin{bmatrix} 1 &0&-1 \end{bmatrix}*\begin{bmatrix} 1 \\2\\1 \end{bmatrix}=\begin{bmatrix} 1&2&1\\0&0&0\\-1&-2&-1
\end{bmatrix}
3. 原始实现
我们先放出针对3\times 3的 Sobel 算子的原始实现代码,如下所示:
inline unsigned char IM_ClampToByte(int Value)
{
if (Value < 0)
return 0;
else if (Value > 255)
return 255;
else
return (unsigned char)Value;
//return ((Value | ((signed int)(255 - Value) >> 31)) & ~((signed int)Value >> 31));
}
void Sobel_FLOAT(unsigned char *Src, unsigned char *Dest, int Width, int Height, int Stride) {
int Channel = Stride / Width;
unsigned char *RowCopy = (unsigned char*)malloc((Width + 2) * 3 * Channel);
unsigned char *First = RowCopy;
unsigned char *Second = RowCopy + (Width + 2) * Channel;
unsigned char *Third = RowCopy + (Width + 2) * 2 * Channel;
//拷贝第二行数据,边界值填充
memcpy(Second, Src, Channel);
memcpy(Second + Channel, Src, Width*Channel);
memcpy(Second + (Width + 1)*Channel, Src + (Width - 1)*Channel, Channel);
//第一行和第二行一样
memcpy(First, Second, (Width + 2) * Channel);
//拷贝第三行数据,边界值填充
memcpy(Third, Src + Stride, Channel);
memcpy(Third + Channel, Src + Stride, Width * Channel);
memcpy(Third + (Width + 1) * Channel, Src + Stride + (Width - 1) * Channel, Channel);
for (int Y = 0; Y < Height; Y++) {
unsigned char *LinePS = Src + Y * Stride;
unsigned char *LinePD = Dest + Y * Stride;
if (Y != 0) {
unsigned char *Temp = First;
First = Second;
Second = Third;
Third = Temp;
}
if (Y == Height - 1) {
memcpy(Third, Second, (Width + 2) * Channel);
}
else {
memcpy(Third, Src + (Y + 1) * Stride, Channel);
memcpy(Third + Channel, Src + (Y + 1) * Stride, Width * Channel); // 由于备份了前面一行的数据,这里即使Src和Dest相同也是没有问题的
memcpy(Third + (Width + 1) * Channel, Src + (Y + 1) * Stride + (Width - 1) * Channel, Channel);
}
if (Channel == 1) {
for (int X = 0; X < Width; X++)
{
int GX = First[X] - First[X + 2] + (Second[X] - Second[X + 2]) * 2 + Third[X] - Third[X + 2];
int GY = First[X] + First[X + 2] + (First[X + 1] - Third[X + 1]) * 2 - Third[X] - Third[X + 2];
LinePD[X] = IM_ClampToByte(sqrtf(GX * GX + GY * GY + 0.0F));
}
}
else
{
for (int X = 0; X < Width * 3; X++)
{
int GX = First[X] - First[X + 6] + (Second[X] - Second[X + 6]) * 2 + Third[X] - Third[X + 6];
int GY = First[X] + First[X + 6] + (First[X + 3] - Third[X + 3]) * 2 - Third[X] - Third[X + 6];
LinePD[X] = IM_ClampToByte(sqrtf(GX * GX + GY * GY + 0.0F));
}
}
}
free(RowCopy);
}
这段代码有两个主要特点,一是它支持 In-Place 操作,也即是说 Src 和 Dest 可以是同一块内存;二是,这个代码考虑了边缘 Padding,边界处理在图像处理中是比较重要的。
速度测试结果如下:
| 分辨率 | 算法优化 | 循环次数 | 速度 |
|---|---|---|---|
| 4032×3024 | 普通实现 | 1000 | 126.54ms |
4. Sobel 边缘检测算法优化第一版
一个比较显然的优化方法是把上述代码中的IM_ClampToByte(sqrtf(GX * GX + GY * GY + 0.0F))利用查表法的技巧来优化,简单改成下面的版本,避免了浮点数运算。注意为什么表的长度最多是65026?因为255*255=65025,所以开方之后最大值为255,也即是像素的最大表示范围,所以超过65025其实都是无效的。
void Sobel_INT(unsigned char *Src, unsigned char *Dest, int Width, int Height, int Stride) {
int Channel = Stride / Width;
unsigned char *RowCopy = (unsigned char*)malloc((Width + 2) * 3 * Channel);
unsigned char *First = RowCopy;
unsigned char *Second = RowCopy + (Width + 2) * Channel;
unsigned char *Third = RowCopy + (Width + 2) * 2 * Channel;
//拷贝第二行数据,边界值填充
memcpy(Second, Src, Channel);
memcpy(Second + Channel, Src, Width*Channel);
memcpy(Second + (Width + 1)*Channel, Src + (Width - 1)*Channel, Channel);
//第一行和第二行一样
memcpy(First, Second, (Width + 2) * Channel);
//拷贝第三行数据,边界值填充
memcpy(Third, Src + Stride, Channel);
memcpy(Third + Channel, Src + Stride, Width * Channel);
memcpy(Third + (Width + 1) * Channel, Src + Stride + (Width - 1) * Channel, Channel);
unsigned char Table[65026];
for (int Y = 0; Y < 65026; Y++) Table[Y] = (sqrtf(Y + 0.0f) + 0.5f);
for (int Y = 0; Y < Height; Y++) {
unsigned char *LinePS = Src + Y * Stride;
unsigned char *LinePD = Dest + Y * Stride;
if (Y != 0) {
unsigned char *Temp = First;
First = Second;
Second = Third;
Third = Temp;
}
if (Y == Height - 1) {
memcpy(Third, Second, (Width + 2) * Channel);
}
else {
memcpy(Third, Src + (Y + 1) * Stride, Channel);
memcpy(Third + Channel, Src + (Y + 1) * Stride, Width * Channel); // 由于备份了前面一行的数据,这里即使Src和Dest相同也是没有问题的
memcpy(Third + (Width + 1) * Channel, Src + (Y + 1) * Stride + (Width - 1) * Channel, Channel);
}
if (Channel == 1) {
for (int X = 0; X < Width; X++)
{
int GX = First[X] - First[X + 2] + (Second[X] - Second[X + 2]) * 2 + Third[X] - Third[X + 2];
int GY = First[X] + First[X + 2] + (First[X + 1] - Third[X + 1]) * 2 - Third[X] - Third[X + 2];
LinePD[X] = Table[min(GX * GX + GY * GY, 65025)];
}
}
else
{
for (int X = 0; X < Width * 3; X++)
{
int GX = First[X] - First[X + 6] + (Second[X] - Second[X + 6]) * 2 + Third[X] - Third[X + 6];
int GY = First[X] + First[X + 6] + (First[X + 3] - Third[X + 3]) * 2 - Third[X] - Third[X + 6];
LinePD[X] = Table[min(GX * GX + GY * GY, 65025)];
}
}
}
free(RowCopy);
}
| 分辨率 | 算法优化 | 循环次数 | 速度 |
|---|---|---|---|
| 4032×3024 | 普通实现 | 1000 | 126.54ms |
| 4032×3024 | Float->INT+ 查表法 | 1000 | 81.62ms |
5. Sobel 边缘检测算法优化第二版
再第一版优化的代码基础上,我们来考虑一下使用 SSE 来进行算法优化。从代码中可以看到对于灰度图的优化是没有必要的,因为在计算的时候当前像素只和另外两个像素相关:

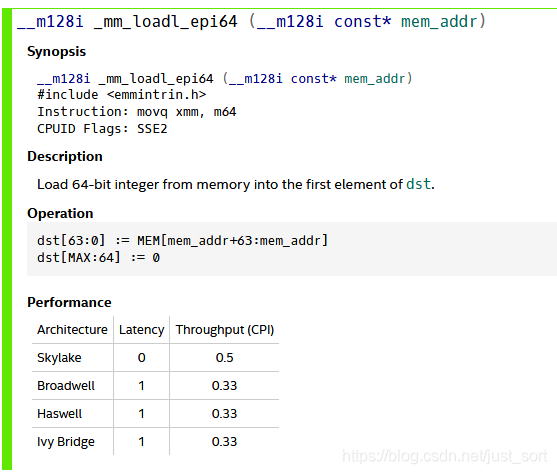
这里面涉及到了 8 个不同的像素,考虑到计算的特性和数据的范围,在内部计算时这个 int 可以用 short 代替,也就是先把加载的字节型数据转换成 short 类型,这样就可以用 8 个 SSE 变量记录 8 个连续的像素值,每个像素值用 16 位的数据来表达,这里可以使用_mm_loadl_epi64配合_mm_unpacklo_epi8来实现,其中_mm_loadl_epi64指令实现的功能如下:
而_mm_unpacklo_epi8指令实现的功能如下:
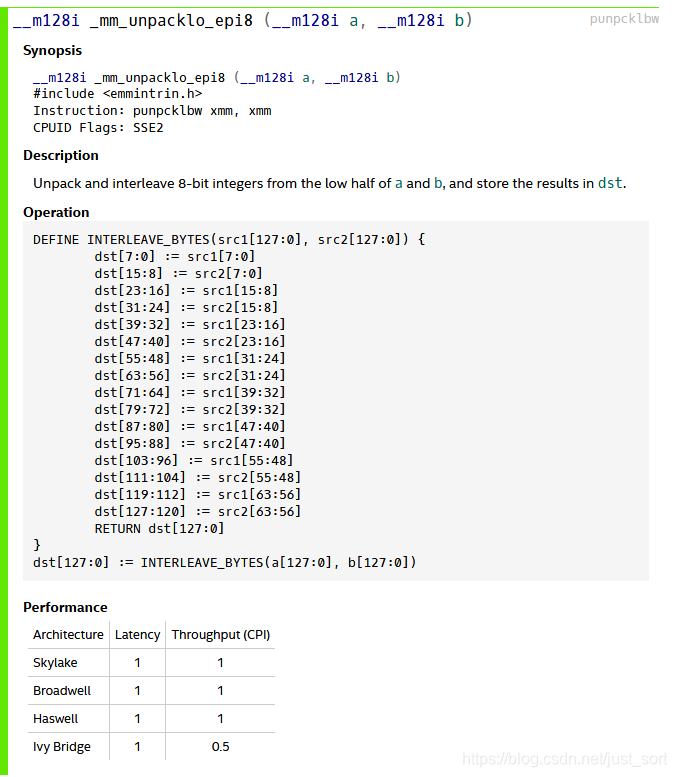
因此,这部分的代码实现如下:
__m128i FirstP0 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(First + X)), Zero);
__m128i FirstP1 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(First + X + 3)), Zero);
__m128i FirstP2 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(First + X + 6)), Zero);
__m128i SecondP0 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(Second + X)), Zero);
__m128i SecondP2 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(Second + X + 6)), Zero);
__m128i ThirdP0 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(Third + X)), Zero);
__m128i ThirdP1 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(Third + X + 3)), Zero);
__m128i ThirdP2 = _mm_unpacklo_epi8(_mm_loadl_epi64((__m128i *)(Third + X + 6)), Zero);
接下来我们开始对 GX 和 GY 进行计算:
__m128i GX16 = _mm_abs_epi16(_mm_add_epi16(_mm_add_epi16(_mm_sub_epi16(FirstP0, FirstP2), _mm_slli_epi16(_mm_sub_epi16(SecondP0, SecondP2), 1)), _mm_sub_epi16(ThirdP0, ThirdP2)));
__m128i GY16 = _mm_abs_epi16(_mm_sub_epi16(_mm_add_epi16(_mm_add_epi16(FirstP0, FirstP2), _mm_slli_epi16(_mm_sub_epi16(FirstP1, ThirdP1), 1)), _mm_add_epi16(ThirdP0, ThirdP2)));
这个时候的 GX16 和 GY16 里保存的是 8 个 16 位的中间结果,由于 SSE 只提供了浮点数的 sqrt 操作,我们必须将它们转换为浮点数,那么这个转换的第一步就必须是先将它们转换为 int 的整形数,这样,就必须一个拆成 2 个,即:
__m128i GX32L = _mm_unpacklo_epi16(GX16, Zero);
__m128i GX32H = _mm_unpackhi_epi16(GX16, Zero);
__m128i GY32L = _mm_unpacklo_epi16(GY16, Zero);
__m128i GY32H = _mm_unpackhi_epi16(GY16, Zero);
接下来分别对高位低位进行平方运算:
__m128i ResultL = _mm_cvtps_epi32(_mm_sqrt_ps(_mm_cvtepi32_ps(_mm_add_epi32(_mm_mullo_epi32(GX32L, GX32L), _mm_mullo_epi32(GY32L, GY32L)))));
__m128i ResultH = _mm_cvtps_epi32(_mm_sqrt_ps(_mm_cvtepi32_ps(_mm_add_epi32(_mm_mullo_epi32(GX32H, GX32H), _mm_mullo_epi32(GY32H, GY32H)))));
最后一步,得到 8 个 uchar 型的结果,这个结果有要转换为字节类型的,并且这些数据有可能会超出字节所能表达的范围,所以就需要用到 SSE 的抗饱和向下打包指令了:
_mm_storel_epi64((__m128i *)(LinePD + X), _mm_packus_epi16(_mm_packus_epi32(ResultL, ResultH), Zero));
OK,现在来测一把速度:
| 分辨率 | 算法优化 | 循环次数 | 速度 |
|---|---|---|---|
| 4032×3024 | 普通实现 | 1000 | 126.54ms |
| 4032×3024 | Float->INT+ 查表法 | 1000 | 81.62ms |
| 4032×3024 | SSE 优化版本 1 | 1000 | 34.95ms |
在上面的代码中还要额外注意一点,通常,我们都是对像素的字节数据进行向上扩展,他们都是正数,所以用 unpack 之类的配合 zero 把高 8 位或高 16 位的数据填充为 0 就可以了,但是在本例中,GX16 或者 GY16 很有可能是负数,而负数的最高位是符号位,如果都填充为 0,则变为正数了,明显改变原始的数据了,所以得到了错误的结果。
那么我们是如何解决这个问题的呢?
对于这个例子,因为后面只有一个平方操作,因此对 GX 先取绝对值是不会改变计算的结果的,这样就不会出现负的数据了,修改之后,果然结果正确。
6. Sobel 边缘检测算法优化第三版
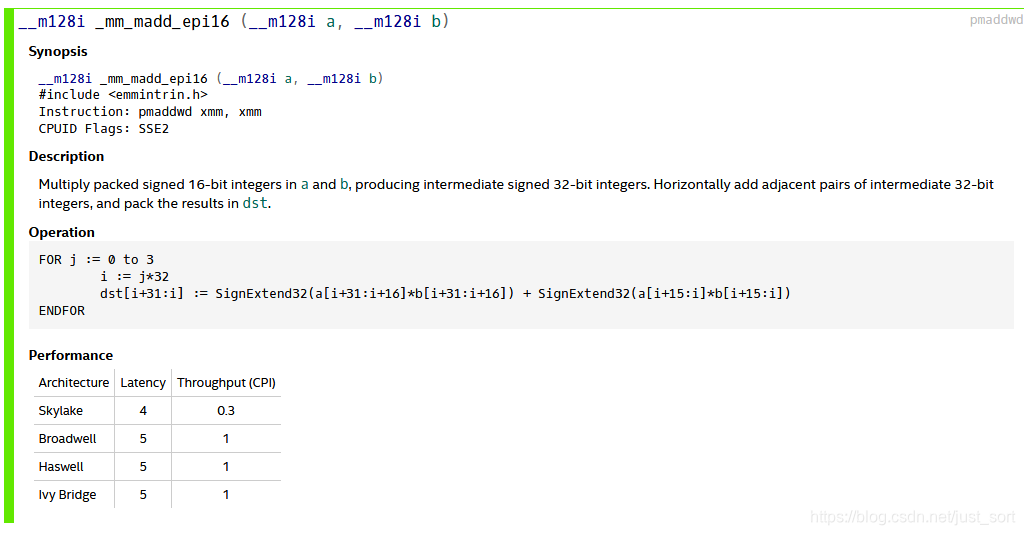
从 ImageShop 博主那里继续学到了另外一种优化方法,我们观察一下最后计算GX*GX+GY*GY的过程,我们知道,SSE3 提供了一个_mm_madd_epi16指令,其作用是:
 如果我们可以把 GX 和 GY 的数据拼接成另外两个数据:
如果我们可以把 GX 和 GY 的数据拼接成另外两个数据:
GXYL = GX0 GY0 GX1 GY1 GX2 GY2 GX3 GY3
GXYH = GX4 GY4 GX5 GY5 GX6 GY6 GX7 GY7
那么直接调用_mm_madd_epi16(GXYL,GXYL)和_mm_madd_epi16(GXYH, GXYH)不就能得到和之前一样的结果了?并且这个拼接可以使用下面的代码实现:
__m128i GXYL = _mm_unpacklo_epi16(GX16, GY16);
__m128i GXYH = _mm_unpackhi_epi16(GX16, GY16);
这样上一个版本中的10 条 SIMD 指令就变成了 4 条,代码更加简洁并且速度也更快了。
来测一把速度:
| 分辨率 | 算法优化 | 循环次数 | 速度 |
|---|---|---|---|
| 4032×3024 | 普通实现 | 1000 | 126.54ms |
| 4032×3024 | Float->INT+ 查表法 | 1000 | 81.62ms |
| 4032×3024 | SSE 优化版本 1 | 1000 | 34.95ms |
| 4032×3024 | SSE 优化版本 2 | 1000 | 28.87ms |
7. Sobel 边缘检测算法优化第四版
在 SSE 中每次只能处理 8 个结果,自然使用 AVX 指令集来完成单次 16 个像素的处理,AVX 版本的代码实现如下:
unsigned char *RowCopy;
unsigned char *First;
unsigned char *Second;
unsigned char *Third;
int Channel, Block, BlockSize;
void _Sobel(unsigned char* Src, const int32_t Width, const int32_t Height, const int32_t start_row, const int32_t thread_stride, const int32_t Stride, unsigned char* Dest) {
for (int Y = start_row; Y < start_row + thread_stride; Y++) {
unsigned char *LinePS = Src + Y * Stride;
unsigned char *LinePD = Dest + Y * Stride;
if (Y != 0) {
unsigned char *Temp = First;
First = Second;
Second = Third;
Third = Temp;
}
if (Y == Height - 1) {
memcpy(Third, Second, (Width + 2) * Channel);
}
else {
memcpy(Third, Src + (Y + 1) * Stride, Channel);
memcpy(Third + Channel, Src + (Y + 1) * Stride, Width * Channel); // 由于备份了前面一行的数据,这里即使Src和Dest相同也是没有问题的
memcpy(Third + (Width + 1) * Channel, Src + (Y + 1) * Stride + (Width - 1) * Channel, Channel);
}
if (Channel == 1) {
for (int X = 0; X < Width; X++)
{
int GX = First[X] - First[X + 2] + (Second[X] - Second[X + 2]) * 2 + Third[X] - Third[X + 2];
int GY = First[X] + First[X + 2] + (First[X + 1] - Third[X + 1]) * 2 - Third[X] - Third[X + 2];
//LinePD[X] = Table[min(GX * GX + GY * GY, 65025)];
}
}
else
{
__m256i Zero = _mm256_setzero_si256();
for (int X = 0; X < Block * BlockSize; X += BlockSize)
{
__m256i FirstP0 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(First + X)));
__m256i FirstP1 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(First + X + 3)));
__m256i FirstP2 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(First + X + 6)));
__m256i SecondP0 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(Second + X)));
__m256i SecondP2 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(Second + X + 6)));
__m256i ThirdP0 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(Third + X)));
__m256i ThirdP1 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(Third + X + 3)));
__m256i ThirdP2 = _mm256_cvtepu8_epi16(_mm_loadu_si128((const __m128i*)(Third + X + 6)));
//GX0 GX1 GX2 GX3 GX4 GX5 GX6 GX7 GX8 GX9 GX10 GX11 GX12 GX13 GX14 GX15
__m256i GX16 = _mm256_abs_epi16(_mm256_adds_epi16(_mm256_adds_epi16(_mm256_subs_epi16(FirstP0, FirstP2), _mm256_slli_epi16(_mm256_subs_epi16(SecondP0, SecondP2), 1)), _mm256_subs_epi16(ThirdP0, ThirdP2)));
//GY0 GY1 GY2 GY3 GY4 GY5 GY6 GY7 GY8 GY9 GY10 GY11 GY12 GY13 GY14 GY15
__m256i GY16 = _mm256_abs_epi16(_mm256_subs_epi16(_mm256_adds_epi16(_mm256_adds_epi16(FirstP0, FirstP2), _mm256_slli_epi16(_mm256_subs_epi16(FirstP1, ThirdP1), 1)), _mm256_adds_epi16(ThirdP0, ThirdP2)));
//GX0 GY0 GX1 GY1 GX2 GY2 GX3 GY3 GX4 GY4 GX5 GY5 GX6 GY6 GX7 GY7
__m256i GXYL = _mm256_unpacklo_epi16(GX16, GY16);
//GX8 GY8 GX9 GY9 GX10 GY10 GX11 GY11 GX12 GY12 GX13 GY13 GX14 GY14 GX15 GY15
__m256i GXYH = _mm256_unpackhi_epi16(GX16, GY16);
__m256i ResultL = _mm256_cvtps_epi32(_mm256_sqrt_ps(_mm256_cvtepi32_ps(_mm256_madd_epi16(GXYL, GXYL))));
__m256i ResultH = _mm256_cvtps_epi32(_mm256_sqrt_ps(_mm256_cvtepi32_ps(_mm256_madd_epi16(GXYH, GXYH))));
__m256i Result = _mm256_packus_epi16(_mm256_packus_epi32(ResultL, ResultH), Zero);
__m128i Ans = _mm256_castsi256_si128(Result);
_mm_storeu_si128((__m128i *)(LinePD + X), Ans);
}
for (int X = Block * BlockSize; X < Width * 3; X++)
{
int GX = First[X] - First[X + 6] + (Second[X] - Second[X + 6]) * 2 + Third[X] - Third[X + 6];
int GY = First[X] + First[X + 6] + (First[X + 3] - Third[X + 3]) * 2 - Third[X] - Third[X + 6];
LinePD[X] = IM_ClampToByte(sqrtf(GX * GX + GY * GY + 0.0F));
}
}
}
}
void Sobel_AVX1(unsigned char *Src, unsigned char *Dest, int Width, int Height, int Stride) {
Channel = Stride / Width;
RowCopy = (unsigned char*)malloc((Width + 2) * 3 * Channel);
First = RowCopy;
Second = RowCopy + (Width + 2) * Channel;
Third = RowCopy + (Width + 2) * 2 * Channel;
//拷贝第二行数据,边界值填充
memcpy(Second, Src, Channel);
memcpy(Second + Channel, Src, Width*Channel);
memcpy(Second + (Width + 1)*Channel, Src + (Width - 1)*Channel, Channel);
//第一行和第二行一样
memcpy(First, Second, (Width + 2) * Channel);
//拷贝第三行数据,边界值填充
memcpy(Third, Src + Stride, Channel);
memcpy(Third + Channel, Src + Stride, Width * Channel);
memcpy(Third + (Width + 1) * Channel, Src + Stride + (Width - 1) * Channel, Channel);
BlockSize = 16, Block = (Width * Channel) / BlockSize;
_Sobel(Src, Width, Height, 0, Height, Stride, Dest);
free(RowCopy);
}
测试一把速度:
| 分辨率 | 算法优化 | 循环次数 | 速度 |
|---|---|---|---|
| 4032×3024 | 普通实现 | 1000 | 126.54ms |
| 4032×3024 | Float->INT+ 查表法 | 1000 | 81.62ms |
| 4032×3024 | SSE 优化版本 1 | 1000 | 34.95ms |
| 4032×3024 | SSE 优化版本 2 | 1000 | 28.87ms |
| 4032×3024 | AVX2 优化 | 1000 | 15.42ms |
8. Sobel 边缘检测算法优化第五版
和上回的推文一样,我们结合一下 std::async 进行异步并行优化,代码如下:
void Sobel_AVX2(unsigned char *Src, unsigned char *Dest, int Width, int Height, int Stride) {
//INIT
Channel = Stride / Width;
RowCopy = (unsigned char*)malloc((Width + 2) * 3 * Channel);
First = RowCopy;
Second = RowCopy + (Width + 2) * Channel;
Third = RowCopy + (Width + 2) * 2 * Channel;
//拷贝第二行数据,边界值填充
memcpy(Second, Src, Channel);
memcpy(Second + Channel, Src, Width*Channel);
memcpy(Second + (Width + 1)*Channel, Src + (Width - 1)*Channel, Channel);
//第一行和第二行一样
memcpy(First, Second, (Width + 2) * Channel);
//拷贝第三行数据,边界值填充
memcpy(Third, Src + Stride, Channel);
memcpy(Third + Channel, Src + Stride, Width * Channel);
memcpy(Third + (Width + 1) * Channel, Src + Stride + (Width - 1) * Channel, Channel);
BlockSize = 16, Block = (Width * Channel) / BlockSize;
//Run
const int32_t hw_concur = std::min(Height >> 4, static_cast<int32_t>(std::thread::hardware_concurrency()));
std::vector<std::future<void>> fut(hw_concur);
const int thread_stride = (Height - 1) / hw_concur + 1;
int i = 0, start = 0;
for (; i < std::min(Height, hw_concur); i++, start += thread_stride)
{
fut[i] = std::async(std::launch::async, _Sobel, Src, Width, Height, start, thread_stride, Stride, Dest);
}
for (int j = 0; j < i; ++j)
fut[j].wait();
free(RowCopy);
}
速度测试结果如下:
| 分辨率 | 算法优化 | 循环次数 | 速度 |
|---|---|---|---|
| 4032×3024 | 普通实现 | 1000 | 126.54ms |
| 4032×3024 | Float->INT+ 查表法 | 1000 | 81.62ms |
| 4032×3024 | SSE 优化版本 1 | 1000 | 34.95ms |
| 4032×3024 | SSE 优化版本 2 | 1000 | 28.87ms |
| 4032×3024 | AVX2 优化 | 1000 | 15.42ms |
| 4032×3024 | AVX2 优化 +std::async | 1000 | 5.69ms |
9. 总结
这一篇推文展示了如何一步步优化一个3\times 3的 Sobel 边缘检测算法,从原始的 126.54ms 优化到了 5.69ms,加速比为 22 倍。
欢迎关注 GiantPandaCV, 在这里你将看到独家的深度学习分享,坚持原创,每天分享我们学习到的新鲜知识。( • ̀ ω•́ )✧
有对文章相关的问题,或者想要加入交流群,欢迎添加 BBuf 微信:



