OpenCV3入门(十三)图像运动模糊
- 2020 年 3 月 14 日
- 筆記
1、原理
运动模糊产生: 由于相机传感器或物体相对运动, 按快门瞬间造成图像产生运动模糊。
在用摄像机获取景物图像时,如果在相机曝光期间景物和摄像机之间存在相对运动,例如用照相机拍摄快速运动的物体,或者从行驶中的汽车上拍摄外面静止不动的景物时,拍得的照片都可能存在模糊的现象,这种由于相对运动造成图像模糊现象就是运动模糊。运动模糊是一种图片“退化”现象,无法反应真实的场景。
假设图像f(x,y)进行平面运动,x(t0)和y(t0)分别是在x和y方向上随时间变化的量。那么介质上(如胶片或数字存储器)上任意点的曝光总数是通过对时间间隔内瞬间曝光量的积分得到的, 图像系统的快门在该段时间是开着的。假设快门开关所用的时间很短,因此光学成像过程不会受到图像运动干扰。运动模糊产生式:

g(x,y): 代表运动模糊后在坐标(x,y)的结果
T:代表曝光时间
2、实现过程
1)对图像方向分解为x和y方向;
2)因为图像Mat坐标对应图像的正下,所以翻转Y轴;
3)分别计算图像位移;
4)合并多个像素,防止溢出求平均值。
3、代码实例
实验代码如下。只是简单的实现了模糊原理,没有考虑加性噪声n(x)。
void MotionBlur(Mat& img, Mat& dst, int angle, int distance) { angle = -1*angle % 360; double radian = ((double)angle + 180.0) / 180.0*3.1415926; int dx = (int)((double)distance* cos(radian) + 0.5); int dy = (int)((double)distance* sin(radian) + 0.5); int sign = 0; int height = img.rows; int width = img.cols; int chns = img.channels(); if (dst.empty()) dst.create(height, width, img.type()); int i, j, k; int i0=0, j0=0, p, sum, count; for (i = 0; i < height; i++) { unsigned char* dstData = (unsigned char*)dst.data + dst.step*i; for (j = 0; j < width; j++) { for (k = 0; k < chns; k++) { sum = 0, count = 0; sign = (dx > 0) ? 1 : -1; for (p = 0; p < abs(dx); p++) { i0 = i; j0 = j+p * sign; if (i0 >= 0 && i0 < height && j0 >= 0 && j0 < width) { count++; sum += img.at<Vec3b>(i0, j0)[k]; } } sign = (dy > 0) ? 1 : -1; for (p = 0; p < abs(dy); p++) { i0 = i + p * sign; j0 = j; if (i0 >= 0 && i0 < height && j0 >= 0 && j0 < width) { count++; sum += img.at<Vec3b>(i0, j0)[k]; } } if (count == 0) { dstData[j*chns + k] = img.at<Vec3b>(i0, j0)[k]; } else { dstData[j*chns + k] = saturate_cast<uchar>(sum / (double)count + 0.5); } } } } } void test_motion() { Mat src_img = imread("D:\WORK\5.OpenCV\LeanOpenCV\pic_src\pic14.bmp"); imshow("原图", src_img); Mat dst_img; MotionBlur(src_img, dst_img, 180, 20); imshow("motion", dst_img); }
4、测试
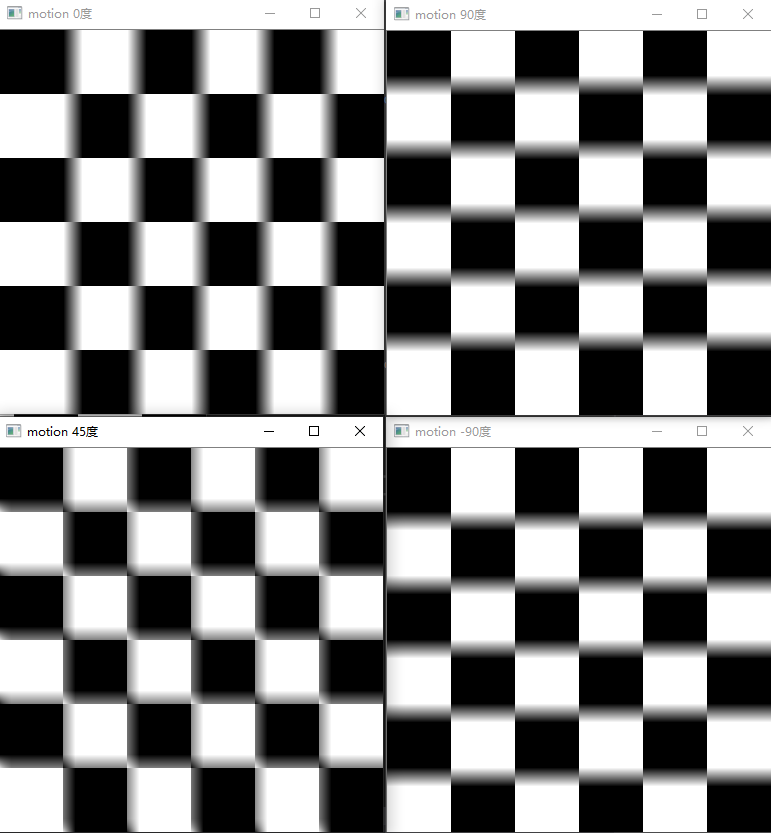
测试1:验证模糊的方向,输入棋盘格图,输出为不同方向的模糊效果图。

输出效果图如下。
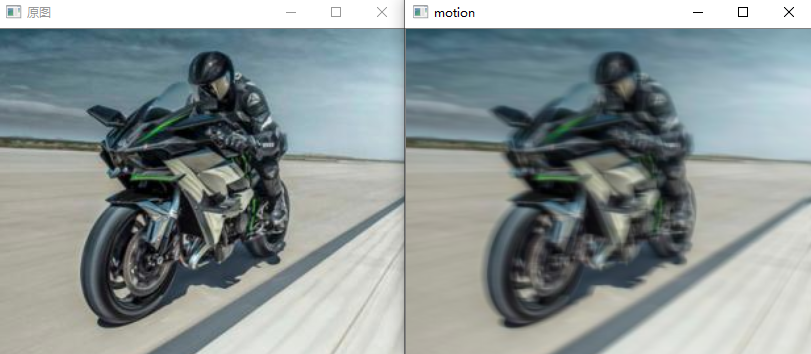
测试2:模糊效果如下图。
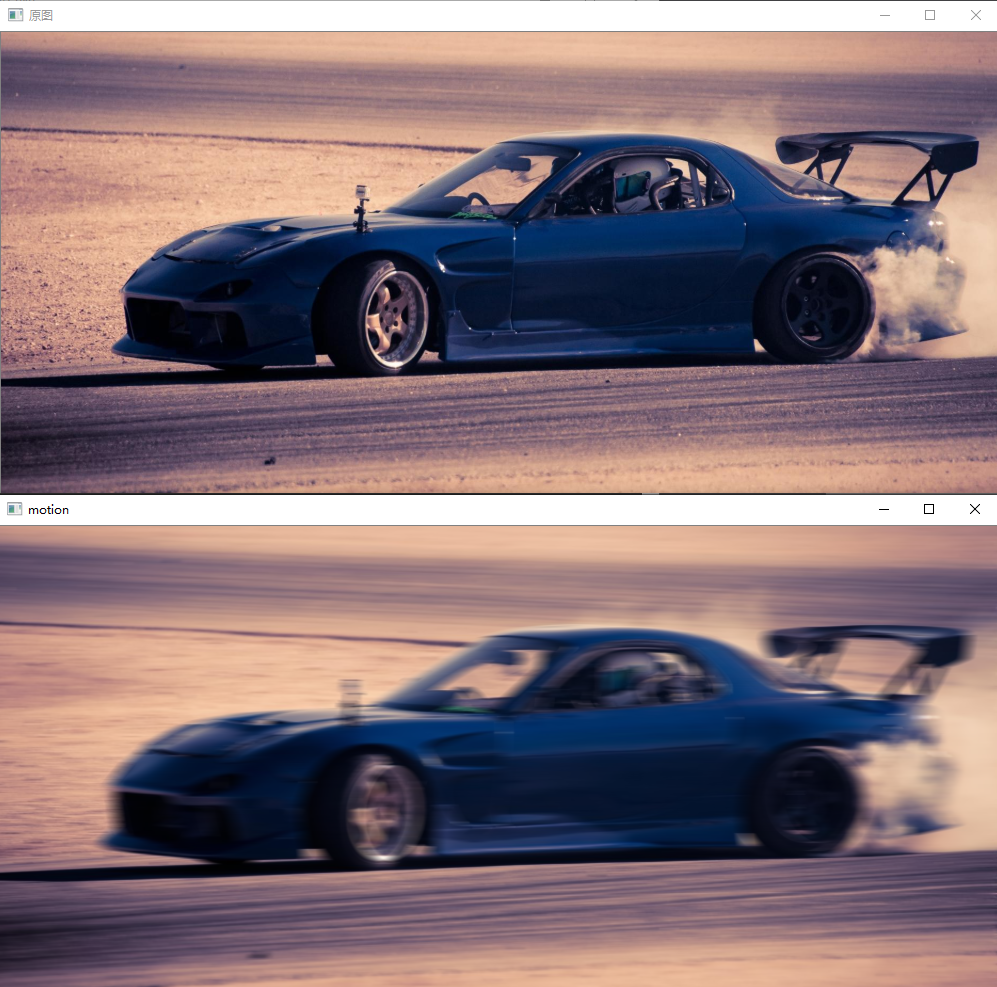
测试3:模糊效果如下图。
5、参考文献
Motion Deblur Filter
https://docs.opencv.org/3.4/d1/dfd/tutorial_motion_deblur_filter.html
图像复原与重建篇——运动模糊
https://blog.csdn.net/jmu201521121021/article/details/80634361
PhotoShop算法实现进阶-模糊滤镜-运动模糊(二十四)
https://blog.csdn.net/kezunhai/article/details/41757681
技术博客,转载请注明。


