DP 优化方法合集
0. 前言
写完这篇文章后发现自己对于 DP 的优化一窍不通,所以补了补 DP 的一些优化,写篇 blog 总结一下。
1. 单调队列/单调栈优化
1.2 算法介绍
这应该算是最基础的 DP 优化方法了。
顾名思义,单调队列/单调栈优化 DP 就是保持容器内元素的单调性,以达成减少冗余状态的目的。
举单调队列的例子来说,当一个元素的两种属性(例如下标和权值)都优于另一元素时,就可以用此元素更换掉另一元素。这也正是 OI 界流传说法“当一个人比你小且比你强时,你就被弹出单调队列了”的原理。
我们以下面的例题作为例子来更具体地阐述这个算法。
1.3 适用范围&区别
一般来说,形如 \(f(i)=\max(f(j)+F(i)+F(j))\) 的式子都可以考虑适用单调队列/单调栈进行优化。(其中 \(F(i)\) 和 \(F(j)\) 表示和 \(i,j\) 有关的函数)
应该大部分人刚学这两种东西的时候都有一种疑惑:啥时候用单调队列,啥时候用单调栈呢?(至少我有
其实,它们两的本质区别还是其结构上的区别。单调栈通常用新加进来的东西替换掉一些栈顶元素,而单调队列是可能两端同时修改的。
在一下例题中我也会着重分析两者的使用。
1.4 例题
I. P1886 滑动窗口
这个不是优化 DP,就是最经典的裸的不能再裸的单调队列。
大力单调队列即可,时间复杂度 \(O(n)\)。
II. CF372C Watching Fireworks is Fun
题目链接
OI Wili 推荐的题
题目大意:一个数轴上有 \(n\) 个点,每个点在位置 \(a_i\),有 \(m\) 个烟花要放,开始时间 \(t_i\)。你一开始的位置随便,每一单位时间可以最多走 \(d\) 这么多的距离,在 \(x\) 看到第 \(i\) 个烟花的快乐值为 \(b_i-|a_i-x|\),求最大的总代价。
数据范围:\(n\leq 150000,m\leq 300\)。
看到这个数据范围就知道大概是 \(O(nm)\) 的算法(最多要卡卡常)。
我们容易设计出 DP 状态 \(f(i,j)\) 表示放第 \(i\) 个烟花,位置在 \(j\) 时的最大快乐值。
转移:\(f(i,j)=\max_{j-(t_i-t_{i-1})\cdot d_i\leq k\leq j+(t_i-t_{i-1})\cdot d_i}(f(i-1,k)+b_i-|a_i-j|)\)。
接下来就需要对 DP 进行优化了,首先因为当 \(i\) 和 \(j\) 确定时 \(b_i-|a_i-j|\) 可以看做常数,剩下的就可以用单调队列去维护了。
注:本题使用单调队列的原因为 \(k\) 两边都有限制,需要头尾都更新。
时间复杂度 \(O(nm)\)。
III. P3572 [POI2014]PTA-Little Bird
IV. P1973 [NOI2011] NOI 嘉年华
V. P2254 [NOI2005] 瑰丽华尔兹
2. 斜率优化
斜率优化自己学过好几遍,也听 dalao 讲过,但是总是感觉半懂不懂的。这次索性把它给搞彻底了罢……
2. 1 算法介绍
以 OI Wiki 上的例题为例。
题目大意:有 \(n\) 个玩具,每个玩具有一个价值 \(c_i\)。你需要将这 \(n\) 个玩具分成若干段,设一段 \([l,r]\) 的代价为 \((r-l+\sum_{i=l}^rc_i-L)^2\),其中 \(L\) 为常数,求最小的总代价。
数据范围:\(n\leq 5\times 10^4\)
使用 DP 优化的一般思路:先设计出一个超时的 DP 再优化。
设 \(f_i\) 表示前 \(i\) 个玩具的代价,那么得出转移方程为:
\]
用前缀和表示后即为:
\]
其中 \(S_i=\sum_{k=1}^ic_k\)。
这就是朴素的 \(O(n^2)\) 的 DP。
下面就要优化了,不过有个问题:DP 跟斜率有什么关系呢?
考虑将 DP 转移方程转化为解析几何中直线的斜截式方程 \(y=kx+b\) 的形式。
我们先将只和 \(i,j\) 有关的归为一类,常数归为一类:\(a_i=s_i+i,\),然后原式可以写成:
\]
然后可以令 \(y=f_j+s_j^2,k=-2(l-s_i),x=s_j,b=f_i-(s_i-l)^2\)。(P.S. 这个应该只要满足 \(y=kx+b\) 都可以?)
此时需要最小化直线的截距,先将这些 \((x,y)\) 表示在平面直角坐标系中:
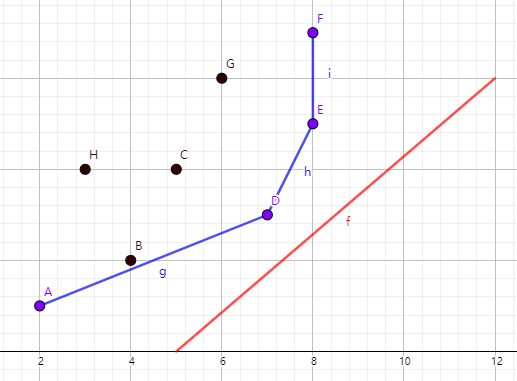
可以看到蓝线连成了一个下凸壳,第一个红线碰到的点使截距最小。
下面的问题就是怎样维护这个凸包,发现存在斜率递增,所以可以用单调栈来维护。
998244352. 参考资料
第 1 章:
第 2 章:


