YOLO系列梳理(三)YOLOv5
前言 YOLOv5 是在 YOLOv4 出来之后没多久就横空出世了。今天笔者介绍一下 YOLOv5 的相关知识。目前 YOLOv5 发布了新的版本,6.0版本。在这里,YOLOv5 也在5.0基础上集成了更多特性,同时也对模型做了微调,并且优化了模型大小,减少了模型的参数量。那么这样,就更加适合移动端了。
欢迎关注公众号

![]()
YOLOv5 网络模型结构
与之前的 YOLOv3、YOLOv4 不同,v3、v4 除了有完整的大模型之外,只有一个轻量级的 tiny 模型,值得注意的是,在 tiny 中,只有两个输出层。而 YOLOv5 则具备四种网络模型:YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x 四种模型。
它们是通过 depth_multiple 和 width_multiple 来控制网络的宽度和深度,这类似 EfficientNet 的思想。
其中,YOLOv5s 在该系列中是深度最小,并且特征图的宽度也最小的网络。其他的网络是在此基础上进行不断地加深、加宽。
YOLOv5 基础组件
-
CBL 由 Conv + BN + Leaky_ReLU 组成。
-
Res unit 是借鉴残差结构的思想来构建网络的。

![]()
-
CBM 是残差模块中的子模块。Conv + BN + Mish 激活函数 。
-
CSP1_X 由 CSPNet 演变而来,该模块由 CBL 模块、Res unit、Conv、还有 Concate 组成,其中X代表有X个这个模块。

![]()
-
CSP2_X 也是由 CSPNet 网络组成,该模块由 Conv 和 X个 Res unit Concate 而成。

![]()
-
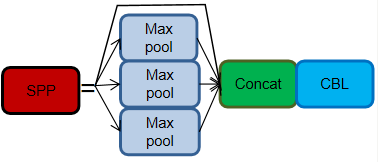
SPP 从 YOLOv3 起,就有使用 SPP 模块。SPP 是 通过采用 1 × 1、5 × 5、9 × 9 和 13 × 13 的最大池化方式,来进行多尺度特征的融合。
![]()
-
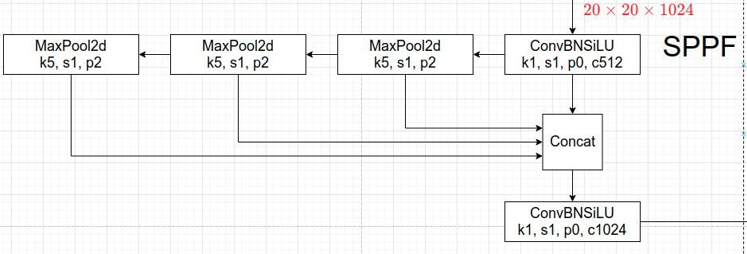
新版的 YOLOv5 中使用的是升级版的 SPP结构,SPPF。它是将原本并行的 MaxPool 替换成了串行 MaxPool。其中串行两个 5 x 5 大小的 MaxPool 和一个 9 x 9 大小的 MaxPool 是等价的,而串行三个 5 x 5 大小的 MaxPool 层和一个 13 x 13 大小的 MaxPool 是等价的。并行和串行的效果一样,但串行的效率更高。
![]()
YOLOv5 知识点
总体来说,YOLOv5 和 YOLOv4 差不多,但还是做了一些调整、优化。
在 YOLOv5 中涉及到的知识:Mosaic数据增强、自适应锚框计算、自适应图片缩放、Focus 结构、CSP 结构、FPN + PAN 结构、GIOU_Loss。
自适应锚框计算
像之前的 YOLOv3、YOLOv4,对于不同的数据集,都会计算先验框 anchor。然后在网络训练时,网络会在 anchor 的基础上进行预测,然后输出预测框,再和标签框进行对比,最后就进行梯度地反向传播。
在 YOLOv3、YOLOv4 中,训练不同的数据集时,是使用单独的脚本进行初始锚框的计算,在 YOLOv5 中,则是将此功能嵌入到整个训练代码里中。所以在每次训练开始之前,它都会根据不同的数据集来自适应计算 anchor。

![]()
如果你觉得计算的锚框效果并不好,那你也可以在代码中将此功能关闭。
自适应的计算具体过程:
1. 获取数据集中所有目标的宽和高。
2. 将每张图片中按照等比例缩放的方式到 resize 指定大小,这里保证宽高中的最大值符合指定大小。
3. 将 bboxes 从相对坐标改成绝对坐标,这里乘以的是缩放后的宽高。
4. 筛选 bboxes,保留宽高都大于等于两个像素的 bboxes。
5. 使用 k-means 聚类三方得到n个 anchors,与v3、v4 操作一样。
6. 使用遗传算法随机对 anchors 的宽高进行变异。倘若变异后的效果好,就将变异后的结果赋值给 anchors;如果变异后效果变差就跳过,默认变异1000次。这里是使用 anchor_fitness 方法计算得到的适应度 fitness,然后再进行评估。
自适应图片缩放
自适应图片缩放-针对不同的目标检测算法而言,我们通常需要执行图片缩放操作,即将原始的输入图片缩放到一个固定的尺寸,再将其送入检测网络中。YOLO 系列算法中常用的尺寸包括416 * 416,608 * 608 等尺寸。
原始的缩放方法存在着一些问题,因为在实际的使用中的很多图片的长宽比不同,所以在进行缩放填充之后,两端的黑边大小都不相同,但是如果填充过多,则会存在大量的信息冗余,从而影响整体的推理速度。
为了进一步提升推理速度,YOLOv5 提出一种方法能够自适应的添加最少的黑边到缩放之后的图片中。效果如下图所示:
1. 根据原始图片大小与输入到网络图片大小计算缩放比例。
2. 根据原始图片大小与缩放比例计算缩放后的图片大小。
3. 计算黑边填充数值。
![]()
![]()
需要注意的是:
-
该操作仅在模型推理阶段执行,模型训练阶段仍然和传统的方法相同,将原始图片裁剪到 416 x 416 大小;
-
YOLOv3 与 YOLOv4 中默认填充的数值是 (0,0,0),而 YOLOv5 中默认填充的数值是 (114,114,114);
-
该操作仅仅针对原始图片的短边而言,仍然将长边裁剪到416。
Backbone
Focus结构
![]()
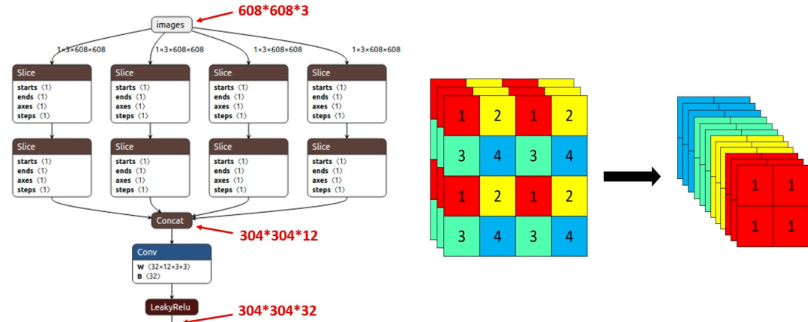
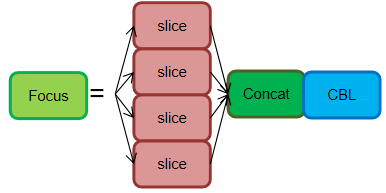
Focus 模块,输入通道扩充了4倍,作用是可以使信息不丢失的情况下提高计算力。Focus 是在 YOLOv5 中提出来的,它先将特征图进行分块切片操作,然后再将结果 Concat 起来,再送入后面模块。
在新版中,YOLOv5 将Focus 模块替换成了一个 6 x 6 的卷积层。两者的计算量是等价的,但是对于一些 GPU 设备,使用 6 x 6 的卷积会更加高效。
![]()
在 YOLOv5s 中,608 x 608 x 3 的图片经 Focus 处理,会变成 304 x 304 x 12 的特征图,这样一定程度上提高了特征图的操作。然后会再经过一次32个卷积核变成 304 x 304 x 32 的特征图。在 YOLOv5s 中,Focus 最后使用了大小为32的卷积核,但是其他结构如 YOLO5m 是使用更大数目的卷积核。
CSP结构
YOLOv5 与 YOLOv4 的不同点在于,YOLOv4 只有主干网络使用了 CSP结构, 而在 YOLOv5 中,设计了两种 CSP 结构。其中,CSP1_X 应用于 Backbone,另一种 CSP2_X 则是应用于 Neck 中。
Neck
YOLOv5 对 FPN + PAN 的结构作了一些改动。在这里使用了另外一种 CSP2_X 的结构,加强网络特征融合的能力。
Head
在训练阶段,YOLOv5 与 YOLOv4 一样,采用其中的了 CIOU_Loss。在推理阶段,YOLOv4 在 DIOU_Loss 的基础上采用了 DIOU_nms 的方式,而 YOLOv5 是采用加权 nms 的方式。
NMS 非极大值抑制
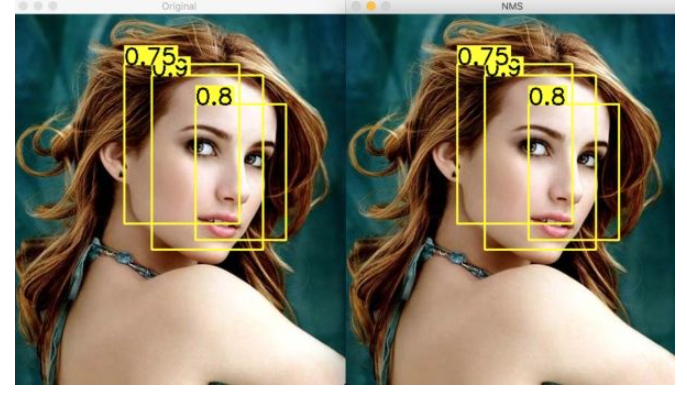
![]()
NMS 的本质是搜索局部极大值,抑制非极大值元素。非极大值抑制,主要就是用来抑制检测时冗余的框。因为在目标检测中,在同一目标的位置上会产生大量的候选框,这些候选框相互之间可能会有重叠,所以我们需要利用非极大值抑制找到最佳的目标边界框,消除冗余的边界框。
大致算法流程为:
1. 对所有预测框的置信度降序排序
2. 选出置信度最高的预测框,确认其为正确预测,并计算他与其他预测框的 IOU
3. 根据步骤2中计算的 IOU 去除重叠度高的,IOU > threshold 阈值就直接删除
4. 剩下的预测框返回第1步,直到没有剩下的为止
NMS 一次处理只会一个类别,所以如果有N个类别,那么就需要执行N次。
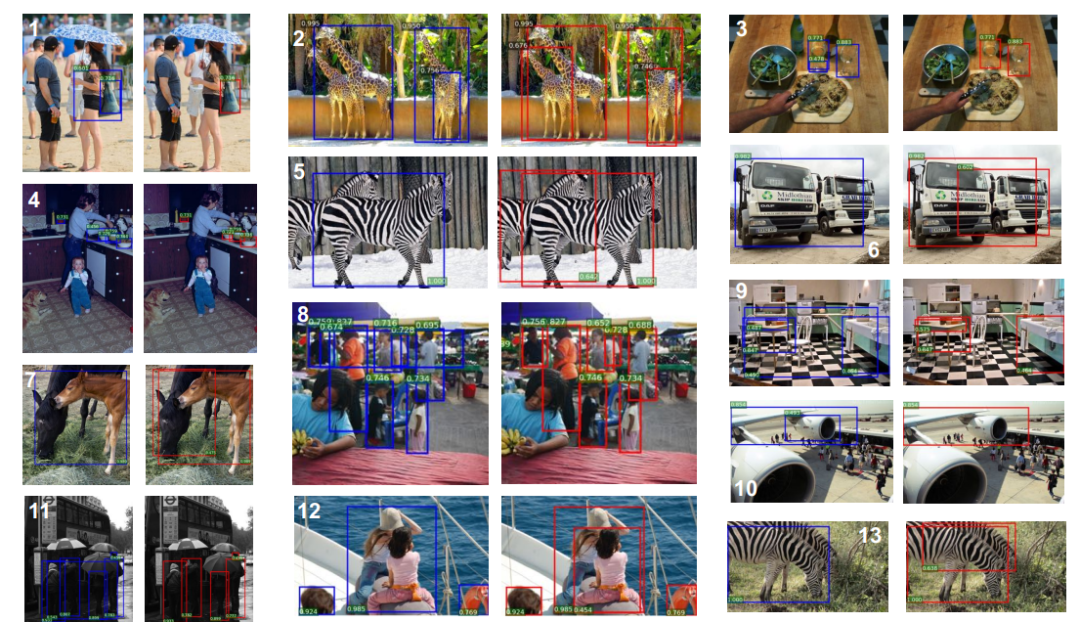
SoftNMS
当两个目标靠的非常近时,置信度低的会被置信度高的框所抑制,那么当两个目标靠的十分近的时候就只会识别出一个 bbox。为了解决这个问题,可以使用 softNMS。它的基本思想是用稍低一点的分数来代替原有的分数,而不是像 nms 一样直接置零。
![]()
训练策略
YOLOv5 也使用了许多训练策略。
-
多尺度训练。如果网络的输入是416 x 416。那么训练的时候就会从 0.5 x 416 到 1.5 x 416 中任意取值,但所取的值都是32的整数倍。
-
训练开始前会使用 warmup 进行训练。在模型预训练阶段,先使用较小的学习率训练一些epochs或者steps (如4个 epoch 或10000个 step),再修改为预先设置的学习率进行训练。
-
使用了 cosine 学习率下降策略。
-
采用了 EMA 更新权重,相当于训练时给参数赋予一个动量,这样更新起来就会更加平滑。
-
使用了 amp 进行混合精度训练。能够减少显存的占用并且加快训练速度,但是需要 GPU 支持。
损失函数
YOLOv5 的损失依旧是由 Classes loss、Objectness loss、Location loss组成:
Location loss 采用的是 CIOU loss,这里只会计算正样本的定位损失。
Classes loss 和 Objectness loss 采用的是 BCE loss。其中 Classes loss 也只会计算正样本的分类损失。
Objectness loss 是使用所有样本进行反向传播的计算,并且这里用的是网络预测的目标边界框与 GT Box 的CIOU。
代码
YOLOv5 的作者并没有发表论文,因此只能从代码角度进行分析。YOLOv5 代码://github.com/ultralytics/yolov5
参考链接
//zhuanlan.zhihu.com/p/172121380
//blog.csdn.net/qq_37541097/article/details/123594351
//zhuanlan.zhihu.com/p/186014243
总结与分析
YOLOv5 是 one stage 的目标检测算法,该算法在 YOLOv4 的基础上添加了一些新的改进思路,使得其速度与精度都得到了极大的性能提升,具体包括:输入端的 Mosaic 数据增强、自适应锚框计算、自适应图片缩放操作、Focus 结构、CSP 结构、SPP 结构、FPN + PAN 结构、CIOU_Loss 等等。除此之外,YOLOv5 中的各种改进思路也可以使用到其它的目标检测算法中。
YOLO系列下一篇将介绍YOLO部署的内容。
YOLO系列专栏文章:

![]()
欢迎关注公众号
CV技术指南创建了一个免费的
欢迎可以写以下内容的朋友联系我(微信号:FewDesire,也可以关注公众号获取本人联系方式)。添加前请备注“内容投递”
-
TVM入门到实践的教程
-
TensorRT入门到实践的教程
-
MNN入门到实践的教程
-
数字图像处理与Opencv入门到实践的教程
-
OpenVINO入门到实践的教程
-
libtorch入门到实践的教程
-
Oneflow入门到实践的教程
-
Detectron入门到实践的教程
-
CUDA入门到实践的教程
-
caffe源码阅读
-
pytorch源码阅读
-
深度学习从入门到精通(从卷积神经网络开始讲起)
-
最新顶会的解读。例如最近的CVPR2022论文。
-
各个方向的系统性综述、主要模型发展演变、各个模型的创新思路和优缺点、代码解析等。
-
若自己有想写的且这上面没提到的,可以跟我联系。
声明:有一定报酬,具体请联系详谈。
其它文章


