基于AHB总线的master读写设计(Verilog)
- 2019 年 10 月 21 日
- 筆記
一、AHB总线学习
1. AHB总线结构
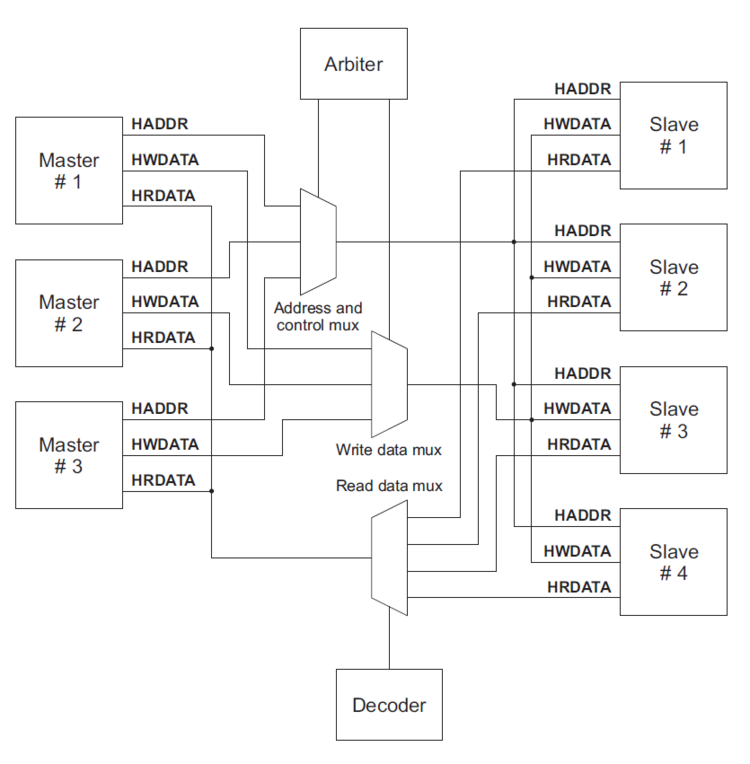

如图所示,AHB总线系统利用中央多路选择机制实现主机与从机的互联问题。从图中可以看出,AHB总线结构主要可分为三部分:主机、从机、控制部分。控制部分由仲裁器、数据多路选择、地址和数据多路选择及地址译码器组成。主机首先需要向仲裁器提出使用总线的请求hbusreq信号,仲裁器通过仲裁(多主机使用总线的优先级)授权(hgrant)给某一主机(注意:一个周期内只能有一个主机接入总线),此时,主机就可以开始进行AHB传输了。主机首先发出地址和控制信号。这些信号主要提供地址信息、传输方向、带宽及burst类型(burst传输并非本文重点,故不作讨论)。由于AHB总线统一给每个从机分配地址,译码器可以根据主机发出的地址选择哪个主机与从机进行互联。
2、AHB总线基本传输
AHB总线的一次传输主要由两部分组成:地址段(开始传输的第一个周期)和数据段(传输开始后的周期)。在hclk上升沿来临时,获得授权的主机驱动地址和控制信号到AHB总线上,在hclk下一周期的上升沿时,slave开始采样地址和控制信息。获取地址和控制信息的slave会返回hresp(回应信号)给master,而在hclk的第三个时钟上升沿hresp被master采样,与此同时,master与slave间完成数据的第一次读写操作。
在进行数据传输时,若从机没有准备好接收下一个数据iketongg将hready信号拉低来插入一个空闲周期,等下一周期hready重新为高时再接收数据。主机在当前周期发送完部分数据,而在下一周期没有准备好发后面的数据,可通过加入BUSY状态来延缓传输。
二、基于AHB总线的读写设计
1、输入输出接口
在设计某个模块时,首先需要理清它有哪些输入输出,从而对设计进行一个整体了解。由于本文的读写模块设计属于比较基础的AHB传输,不涉及突发传输、锁定传输和从机的分块传输。本设计的输入有:hclk_i、irst_n、hgrant_i、hrdata_i、hready_i,输出有:hwdata_o、htrans_o、hwrite_o、haddr_o、hbusreq_o。
1、状态机设计
状态机的设计比较重要,本设计的主状态机是:空闲状态、读状态、写状态,从状态机分为读状态机(rd_fsm_r)和写状态机(wr_fsm_r),读状态机和写状态机的状态转移图如图所示。
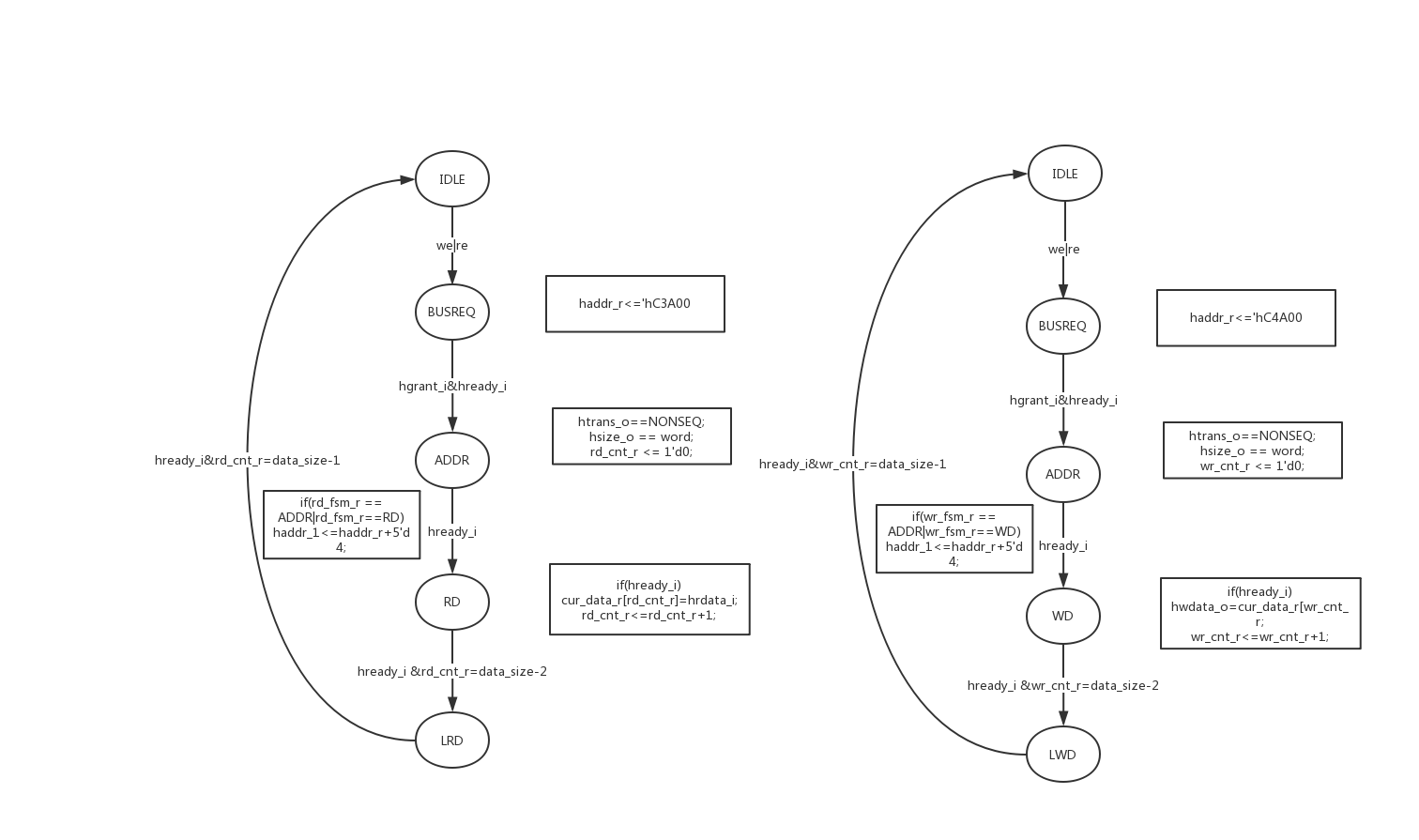

根据AHB总线地址段和数据段的特性,可将其分为:空闲状态、请求总线状态、地址段状态、读/写数据状态和读/写最后一个字节状态。注意:在状态机中,何时有效很重要,从图中可以看出,各状态的触发条件都有hready_i信号(由于hready_i信号是一直在变化的,可能前一个状态hready_i信号为高,但后一个状态会变低,不能使用软件思维去思考。),其次,何时开始读/写数据,何时数据读/写完成,这都是由计数器计数来决定的。
2、设计时序图
读写过程比较类似,时序图如图所示:


从图中可以看出,地址与数据并非在同一周期(AHB总线的特性)。当前周期的地址,存储的数据在下一周期才会出现。这种地址和数据交叠出现使总线能进行高性能操作的同时,给从机也提供了足够的时间来响应传输。
3、基本代码
(1)状态机逻辑
module ahb_test(hbusreq_o,haddr_o,htrans_o,hwdata_o,hwrite_o, hclk_i,irst_n,hgrant_i,hready_i,hrdata_i,we_i,re_i); input hclk_i,irst_n,we_i,re_i,hgrant_i,hready_i; input [31:0] hrdata_i; output hbusreq_o,hwrite_o; output [31:0] hwdata_o; output [1:0] htrans_o; output [31:0] haddr_o; reg [1:0] main_fsm_r; reg [2:0] rd_fsm_r; reg [2:0] wr_fsm_r; reg [31:0 haddr_r; reg [2:0] rd_cnt_r; reg [2:0] wr_cnt_r; parameter data_size = 4; //读写4个字节数据 parameter rd_base_addr = 'h1A00; parameter wr_base_addr = 'h1B00; //the status of main fsm parameter S0 = 'd0; parameter S1 = 'd1; parameter S2 = 'd2; //the status of read fsm parameter RD_IDLE = 3'b000; parameter RD_BUSREQ = 3'b001; parameter RD_ADDR = 3'b010; parameter RD_RD = 3'b011; parameter RD_LRD = 3'b100; wire fsm_rd_idle = rd_fsm_r == RD_IDLE; wire fsm_rd_busreq = rd_fsm_r == RD_BUSREQ; wire fsm_rd_addr = rd_fsm_r ==RD_ADDR; wire fsm_rd_rd = rd_fsm_r == RD_RD; wire fsm_rd_lrd = rd_fsm_r === RD_LRD; wire rd_last_data = rd_cnt_r == data_size - 1'd1; //the status of write fsm parameter WR_IDLE = 3'b000; parameter WR_BUSREQ = 3'b001; parameter WR_ADDR = 3'b010; parameter WR_RD = 3'b011; parameter WR_LRD = 3'b100; wire fsm_wr_idle = wr_fsm_r == WR_IDLE; wire fsm_wr_busreq = wr_fsm_r == WR_BUSREQ; wire fsm_wr_addr = wr_fsm_r ==WR_ADDR; wire fsm_wr_wd = wr_fsm_r == WR_WD; wire fsm_wr_lwd = wr_fsm_r === WR_LWD; wire wr_last_data = wr_cnt_r == data_size - 1'd1; //Main FSM wire rd_done; wire wr_done; reg we_r,re_r; reg [1:0] main_fsm_r; always @(posedge hclk_i) if(~irst_n) main_fsm_r <=S0; else case(main_fsm_r) S0: if(we_r | re_r) main_fsm_r <= S1; S1: if(rd_done) main_fsm_r <=S2; S2: if(wr_done) main_fsm_r <=S0; default: main_fsm_r <= S0; endcase //Sub Read FSM always @(posedge hclk_i) if(~irst_n) rd_fsm_r <= RD_IDLE; else case(rd_fsm_r) RD_IDLE : if((we_r | re_r) | (rd_done)) rd_fsm_r <= RD_BUSREQ; RD_BUSREQ : if(hgrant_i & hready_i) rd_fsm_r <= RD_ADDR; RD_ADDR : if(hready_i) rd_fsm_r <= RD_RD; RD_RD : if(rd_cnt_r == data_size-2 & hready_i) rd_fsm_r <= RD_LRD; RD_LRD : if(hready_i & rd_last_data) rd_fsm_r <= RD_IDLE; default: rd_fsm_r <= RD_IDLE; endcase //Sub Write FSM always @(posedge hclk_i) if(~irst_n) wr_fsm_r <= WR_IDLE; else case(wr_fsm_r) WR_IDLE : if(rd_done) wr_fsm_r <= WR_BUSREQ; WR_BUSREQ : if(hgrant_i & hready_i) wr_fsm_r <= WR_ADDR; WR_ADDR : if(hready_i) wr_fsm_r <= WR_WD; WR_WD : if(wr_cnt_r == data_size-2 & hready_i) wr_fsm_r <= WR_LWD; WR_LWD : if(hready_i & wr_last_data) wr_fsm_r <= WR_IDLE; default: wr_fsm_r <= WR_IDLE; endcase
(2)寄存器逻辑
//we_r always @(posedge hclk_i) if(~irst_n | we_r) we_r <= 1'b0; else(we_i) we_r <=1'b1; //re_r always @(posedge hclk_i) if(~irst_n | re_r) re_r <= 1'b0; else(re_i) re_r <=1'b1; assign rd_done = main_fsm_r == S1 & hready_i & rd_last_data; assign wr_done = main_fsm_r == S2 & hready_i & wr_last_data; assign hwrite_o = (main_fsm_r == S2) ? 'd1 : 'd0; assign hbusreq_o = (fsm_rd_busreq || fsm_wr_busreq) ? 'd1 : 'd0; //rd_done_r always @(posedge hclk_i) if(~irst_n || rd_done_r) rd_done_r <= 'd0; else if(rd_done) rd_done_r <= 'd1; //wr_done_r always @(posedge hclk_i) if(~irst_n || wr_done_r) wr_done_r <= 'd0; else if(wr_done) wr_done_r <= 'd1; assign htrans_o = (fsm_rd_addr || fsm_wr_addr) ? 2'b10 : 2'b11; wire addr_add_en = (main_fsm_r == S1 || main_fsm_r == S2) && (fsm_rd_addr || fsm_rd_rd || fsm_wr_addr || fsm_wr_wd); //haddr_r always @(posedge hclk_i) if(~irst_n) haddr_r <= 32'd0; else if(main_fsm_r == S1 & fsm_rd_busreq & hready_i) haddr_r <= rd_base_addr; else if(main_fsm_r == S2 & fsm_wr_busreq & hready_i) haddr_r <= wr_base_addr; else if(addr_add_en) haddr_r <= haddr_r + 32'd4; //rd_cnt_r always @(posedge hclk_i) if (~irst_n) rd_cnt_r <= 3'd0; else if (hready_i & fsm_rd_addr) rd_cnt_r <= 3'd0; else if (hready_i & fsm_rd_rd) rd_cnt_r <= rd_cnt_r + 1'd1; else if (hready_i & rd_last_data) rd_cnt_r <= 3'd0; //wr_cnt_r always @(posedge hclk_i) if (~irst_n) wr_cnt_r <= 3'd0; else if (hready_i & fsm_wr_addr) wr_cnt_r <= 3'd0; else if (hready_i & fsm_wr_wd) wr_cnt_r <= wr_cnt_r + 1'd1; else if (hready_i & wr_last_data) wr_cnt_r <= 3'd0; reg [31:0] rd_data_r [ 0 : data_size-1]; //rd_data_r always @(posedge hclk_i) if(~irst_n) {rd_data_r[0],rd_data_r[1],rd_data_r[2],rd_data_r[3]} <= 32'd0; else if(main_fsm_r == S1 & (fsm_rd_rd || fsm_rd_lrd) & hready_i) rd_data_r <= hrdata_i; assign hwdata_o = (main_fsm_r == S2 & (fsm_wr_wd || fsm_wr_lwd) & hready_i) ? rd_data_r[wr_cnt_r] : 32'b0; assign haddr_o = haddr_r; endmodule
至此,本文基于AHB总线的master读写设计就完成了。在设计过程中,重要的是画出状态机,并理解每个状态的逻辑及状态与状态间跳转的触发条件。需要理解阻塞赋值和非阻塞赋值。在这里说一下我对阻塞赋值和非阻塞赋值的理解:
(1)阻塞赋值(需要使用寄存器将值存储起来,使用always块赋值):当前周期时钟上升沿时存储值,下一周期时钟上升沿才会进行赋值操作。(和下一周期的时序也有关系)
(2)非阻塞赋值(组合逻辑,assign赋值):当前周期时钟上升沿赋值生效,不存储值。使用assign能实时给wire型信号赋值。(在当前周期完成操作)
模块输入输出一般都是wire型,内部逻辑可以是wire也可以是reg,一般先对一些内部逻辑信号进行各种操作,最后再将其赋值给输出信号。如本文assign haddr_o = haddr_r;中间对haddr_r进行操作,最后将其赋值给haddr_o。