LR: GLU-Net: Global-Local Universal Network for Dense Flow and Correspondences
- 2021 年 6 月 8 日
- 筆記
Abstract
在图像中简历稠密匹配是很重要的任务, 包括 几何匹配,光流,语义匹配。
但是这些应用有很大的挑战:
- 大的平移,
- 像素精度,
- 外观变化;
当前是用特定的网络架构来解决一个单一问题。
我们提出了一个 universal 网络框架,我们获得了高精度和鲁棒性,对于大的平移,通过全局和局部相关层。
我们提出的GLU-Net是SOTA的。
1. Introduction
在几何匹配任务中【18】,有相同场景的不同视角。
光流【4,20】目标是估计准确的像素级别的位移。
在语义匹配任务中【17,38】(也叫语义流),任务是找到不同instances的对应。
光流方法经典的应用 局部相关层【13,23,24,26,57,58】,衡量局部的相似度。它适合小的位移,不能抓住大视角的变化。相对的,几何和语义匹配的框架利用了全局相关【33,41,47,48,49】,在稠密的特征映射中衡量相似度。全局相关层不能处理很高的精度。而且他们把输入图像大小约束成固定分辨率,严重伤害了高精度图像的精度。
贡献
我们提出了GLU-Net,一个全局-局部 通用的网络,来估计稠密匹配。
我们的框架对于大视角变化和外观变化鲁棒,能够以高精度估计小平移。
主要的贡献是:
- 引入了single unified architecture,能够做几何匹配/语义匹配/光流
- 我们的网络几何了全局和局部的关联层来处理大/小平移
- 为了 circumvent(规避)全局cost volume的估计输入分辨率,我们提出了可调整分辨率战略,能够支持各种分辨率图像。
- 是自监督的方式,以来真实图像的合成warp图,所以不需要真值流
我们的方法比之前的方法好。
2. Related Work
hand crafted [2,3,6,19,37,39,50]
trained [12, 44, 62]
variantional formulations [4, 20, 38] ????
Optical Flow:
【13】构建了第一个CNN做光流估计 – FlowNet,基于一个 U-Net denoising autoencoder architecture 【63】,在一个大的合成 FlyingChairs 数据集上。
【26】 堆了几个基础的 FlowNet 变成一个,叫 FlowNet 2, 跟 Sintel benchmark【7】的一些SOTA同等水平。
【46】引入了 SpyNet,一个密集的空间图像金字塔网络。
最近的说得上的 端到端 的光流,包括
【57,58】PWC-Net
【23】LiteFlowNet
【24】LiteFlowNet2
他们用了多约束关联层在一个特征金字塔,然后每个层的特征会被warp通过当前的流估计,导致了更密集和有效的网络。
Geometric Correspondence:
跟光流不一样,几何匹配估计专注于大的几何平移。
【41】引入了DGC-Net,一个coarse-to-fine的CNN框架,生成稠密的2D匹配。它以来全局cost volume – 在最粗的一层。输入size只能是240×240。
【49】旨在提升全局关联层的表现,通过提出端到端的可训练的 neighborhood consensus network NC-Net,来滤除模糊的匹配
【36】lion过了DGC-Net的魔改版本,专注图像检索
Semantic Correspondence
挑战在 intra-class 外观和形状的变化。
【47,48】提出了 CNNGeo 匹配框架,预测了全局参数仿射,thin plate spline变化??
【10,31,32,49】其他方法旨在预测更丰富的几何deformations,用e.g. Spatial tranformer Networks【28】
【30】提出了 PARN,一个金字塔模型,稠密放射变化
【33】SAM-Net获得了更好的结果,通过联合学习语义匹配和 attribute transfer 【22】 DCCNet,它融合了局部特征和背景aware语义特征表达的相关图
3. Method
输入:一对图 \(I_s \in \mathbb{R}^{H \times W \times 3}\) – \(I_t \in \mathbb{R}^{H \times W \times 3}\)
目标:稠密平移场,也叫 flow, \(\mathbf{w} \in \mathbb{R}^{H \times W \times 2}\),这样的话:
\]
整体框架还是随着 CNN 基于特征的 coarse-to-fine 的策略,已经证明了在特定任务上有效【23,30,33,41,57】。
3.1 Local and Global Correlations
当前用于计算光流的框架都是依赖测量局部相似度。这个是在深度特征空间做的,它有可区分度和需要的不变性。
这个结果,一般对应一个相关性,或cost volume, 提供了一个及其有利的cue,在推导最后的匹配或者是流估计。这个correlation可以是局部/全局的方式。
Local correlation
在局部相关层里,特征相似度只在目标像素坐标的近邻衡量,有一个搜索半径 \(R\)。
目标 \(F_{\mathrm{t}}^{l} \in \mathbb{R}^{H_{l} \times W_{l} \times d_{l}}\) 和source \(F_{\mathrm{s}}^{l} \in \mathbb{R}^{H_{l} \times W_{l} \times d_{l}}\) 的相关 \(c^l\)如下:
\]
这里 \(x \in \mathbb{Z}^2\) 是目标特征图的坐标, \(d \in \mathbb{Z}^2\) 是displacement. displacement被约束为 \(\|\mathbf{d}\|_{\infty} \leq R\).
这里 \(l\) 表示特征金字塔的层级.
虽然最自然的考量是一个 4D的tensor, 2 displacement维度是被矢量化为1个在CNN里.
结果的3D相关 volume \(c^l\) 的维度是 \(H_l \times W_l \times (2R +1)^2\)
Global correlation
相关量是 \(C^{l} \in \mathbb{R}^{H_{l} \times W_{l} \times H_{l} \times W_{l}}\):
\]
Comparison
局部相关在optical flow里很流行[13, 23,57], 平移一般很小, 可以用于高分辨率特征图.
因为O2的计算复杂度 \(\mathcal{O}(H_l W_l)^2\), 全局cost volume只在粗的层有用.
另外,后处理的层期待一个固定的维度.
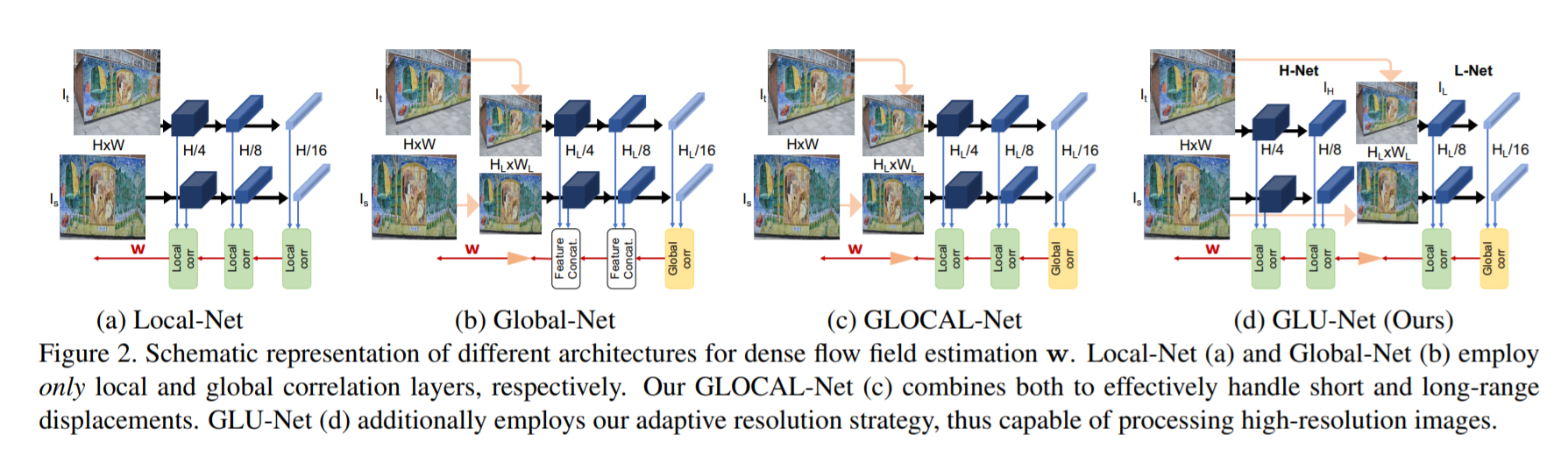
3.2 Global-Local Architecture
受[41] DGC-Net的启发,我们应用了全局相关层在最粗的一层. 这层的目标是处理 long-range 匹配. 因为这些在最粗的一层是最容易捕获的, 只有一个全局相关是需要的.
在后续的层中, dense flow filed 是通过计算图像特征相似度(用局部相关)来refine.
3.3 Adaptive resolution
全局相关层 – 固定的大小严重限制了应用和精度.
我们的 adaptive-resolution 架构包括了两个子网络.
- L-Net: 有source 和 target 图, 下采样到固定的分辨率 \(H_L\times W_L\)
- H-Net: 直接在原图分辨率 \(H\times W\)上操作, 它refine L-Net 的结果.
两个子网络是基于 coarse-to-fine的架构的, 应用了相同的特征提取backbone. L-Net 是基于全局相关 – 在最粗的层 – 为了有效的处理各种几何变换. L-Net 的后续层应用了局部相关来refine flow场. 然后它被上采样作为H-Net的最粗层, 作为初始流估计. 最后, 流预测在H-Net中会被refine多次.
对于高精度的图, 上采样的因子可能很大. 我们的调整分辨率策略允许额外的 refinement 步骤.
3.4 Architecture details
可以用任何特征提取的backbone, 我们用了 VGG-16 [8] 网络(在Image-Net[35]上训练的),来跟之前的工作做一个公平的比较.
对于L-Net, 我们设置输入分辨率 \((H_L \times W_L) = (256 \times 256)\). 它由两层金字塔组成, 敖阔 Conv5-3 (16×15 分辨率) 和 Conv4-3(32×32分辨率). 前者是基于全局相关, 后者是基于局部相关.
对于H-Net, 是原始图像分辨率(HxW)的两层特征金字塔. 为了这个目标, 我们可以用 Conv4-3 和 Conv3-3, 这样分辨率就是 \(\frac{H}{8} \times \frac{W}{8}\) 和 \(\frac{H}{4} \times \frac{W}{4}\). H-Net 是完全基于局部相关层的.
我们最终的GLU-Net, 由四各金字塔组成, 如下:

Coarsest resolution and mapping estimation
\(L^2\) – normalized – 对应全局相关.
这个cost volume 会被应用 channel-wise \(L^2\) -normalisation 和 ReLU[42] 来处理, 来强烈的降低模糊匹配的权重 [47].
跟DGC-Net [41]类似, 结果全局相关 \(C\) 会被塞给匹配map decoder \(M_{top}\) 来估计一个2D稠密匹配图 \(m\) – 在最上层 \(L1\) :
\]
这个对应图会被转化为一个平移场, \(w^1(x) = m^1(x) – x\).
Subsequent flow estimation
flow会被局部相关模块来refine. 在 \(l\) 层, flow decoder \(M\) 推断残差流 \(\delta \tilde{w}^l\) :
\]
\(c\) 是局部相关(2), 搜索半径 \(R\), 和 \(\tilde{F}_s^l(x) = F_s^l(x+up(w^{l-1}(x)))\).
Flow refinement
[9, 22] 证明 contextual信息更有利于像素级别的预测任务.
所以我们用了一个子网络 \(R\), 叫refinement network, 来后处理L-Net和H-Net的最高层(也就是图3里的L2和L4), 通过放大感受野receptive field的大小.
…
Cyclic consistency
我们纳入额外的滤波步骤在全局cost上来加强匹配间的相互约束(reciprocity constraint). 我们用软互相最近邻滤波[49], 用它来后处理全局相关.
3.5 Training
Loss
我们在single phase来训练我们的网络. 我们在训练中固定预先训练的backbone 特征提取器. 跟FlowNet[13]一样, 我们在endpoint error loss对应真值displacement来监督每层金字塔.
Dataset
我们的网络只在应用 随机warps对来训练.
因为我们的网络是设计来训练高分辨率图下的匹配的, 训练数据更倾向是高分辨率的.
我们那个DPET[25], CityScapes[11]和ADE-20K[64]数据及, 图是大于750×750.
在40,000的数据及上, 我们应用同样的合成变换如tokyo(DGC-Net[41]).
图像对会裁剪成520×520来训练.
4. Experimental Validation
我们从三个问题来衡量算法: geometric matching, semantic correspondences和光流.
4.1 Geometric matching
HP:
如DGC-Net[41], 我们应用了HPatches dataset[5]的59个序列, 用v_X标注了, 有视角变换, 排除了标注成 i_X,只有光度变化的.
每个图序列包括一个source image和5个target image,大小从450×600 到 1613×1210.
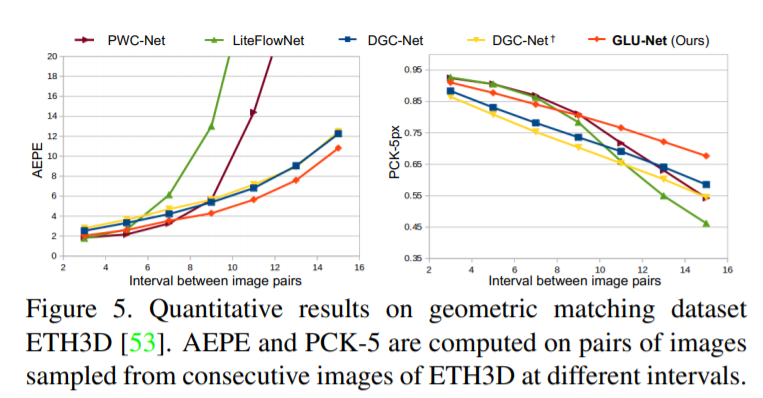
ETH3D
为了验证我们方案在真实3D的表现, 这种时候图像变换不再是简单的单应变换. 我们也用了 Multi-view dataset ETH3D[53]. 10个图像序列, 室内室外都有.
Metrics
跟[41]一直, 我们应用Average End-Point Error (AEPE) 和Percentage of Correct Keypoints (PCK)作为衡量标准. AEPE定义为欧氏距离(真值和估计值).
Compared methods我们跟DGC-Net[41]比较, 为了公平的比较, 我们在我们的数据集上训练了, 叫DGC-Net+.
我们还比较了两个SOTA的光流方法, PWC-Net[57]和LiteFlowNet[23].
Results
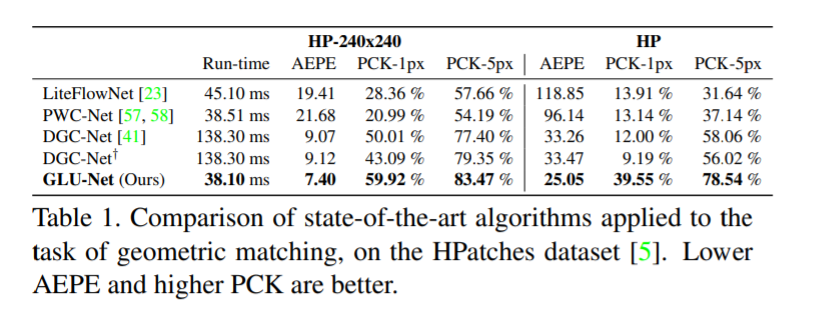
在HP上, GLU-Net比DGC-Net在PCK-1px上高4倍.
我们的模型也比DGC-Net快3.6倍.
光流任务上 PWC-Net[57] 和 LiteFlowNet[23]好一些.
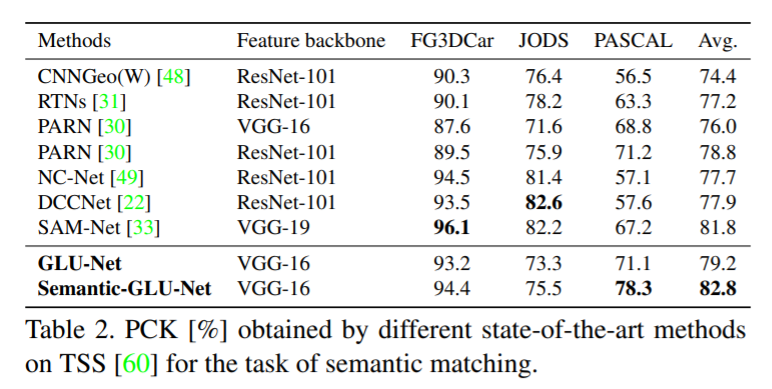
4.2 Semantic Matching
Dataset and metric
我们那个TSS dataset[60].
Compared methods
我们加入一个一致网络[49]来做全局相关层.
Results
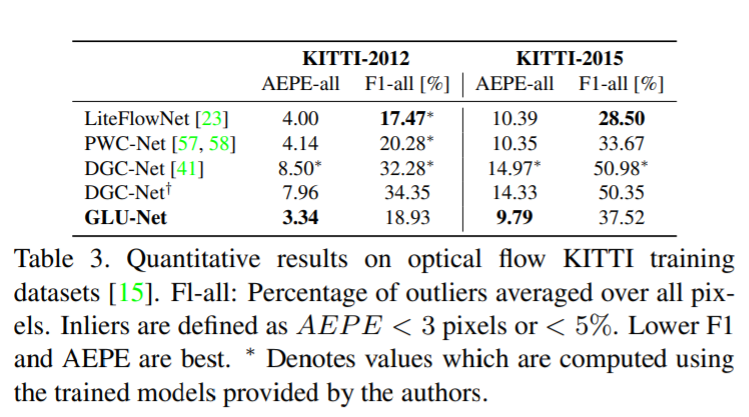
4.3 Optical flow
Dataset and metric
…
Compared methods
…
Results
4.4 Ablation study
Local-global architecture
…
Adaptive resolution
5. Conclusion
..
Appendix
有空再看

